 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRepresentation-Aligned Multi-Scale Personalization for Federated Learning
Apr 13, 2026In federated learning (FL), accommodating clients with diverse resource constraints remains a significant challenge. A widely adopted approach is to use a shared full-size model, from which each client extracts a submodel aligned with its computational budget. However, regardless of the specific scoring strategy, these methods rely on the same global backbone, limiting both structural diversity and representational adaptation across clients. This paper presents FRAMP, a unified framework for personalized and resource-adaptive federated learning. Instead of relying on a fixed global model, FRAMP generates client-specific models from compact client descriptors, enabling fine-grained adaptation to both data characteristics and computational budgets. Each client trains a tailored lightweight submodel and aligns its learned representation with others to maintain global semantic consistency. Extensive experiments on vision and graph benchmarks demonstrate that FRAMP enhances generalization and adaptivity across a wide range of client settings.
Contrastive Conformal Sets
Mar 27, 2026Contrastive learning produces coherent semantic feature embeddings by encouraging positive samples to cluster closely while separating negative samples. However, existing contrastive learning methods lack principled guarantees on coverage within the semantic feature space. We extend conformal prediction to this setting by introducing minimum-volume covering sets equipped with learnable generalized multi-norm constraints. We propose a method that constructs conformal sets guaranteeing user-specified coverage of positive samples while maximizing negative sample exclusion. We establish theoretically that volume minimization serves as a proxy for negative exclusion, enabling our approach to operate effectively even when negative pairs are unavailable. The positive inclusion guarantee inherits the distribution-free coverage property of conformal prediction, while negative exclusion is maximized through learned set geometry optimized on a held-out training split. Experiments on simulated and real-world image datasets demonstrate improved inclusion-exclusion trade-offs compared to standard distance-based conformal baselines.
Uncertainty Principle for Vertex-Time Graph Signal Processing
Feb 03, 2026We present an uncertainty principle for graph signals in the vertex-time domain, unifying the classical time-frequency and graph uncertainty principles within a single framework. By defining vertex-time and spectral-frequency spreads, we quantify signal localization across these domains. Our framework identifies a class of signals that achieve maximum concentration in both the spatial and temporal domains. These signals serve as fundamental atoms for a new vertex-time dictionary, enhancing signal reconstruction under practical constraints, such as intermittent data commonly encountered in sensor and social networks. Furthermore, we introduce a novel graph topology inference method leveraging the uncertainty principle. Numerical experiments on synthetic and real datasets validate the effectiveness of our approach, demonstrating improved reconstruction accuracy, greater robustness to noise, and enhanced graph learning performance compared to existing methods.
Conformal Prediction for Multi-Source Detection on a Network
Nov 12, 2025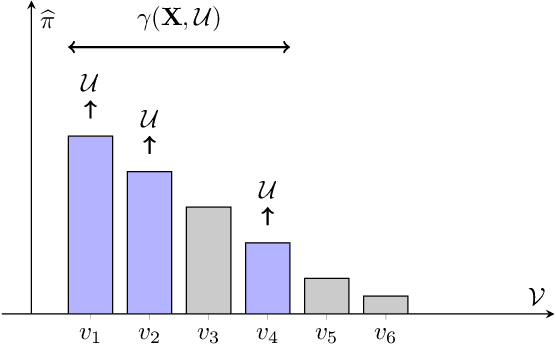
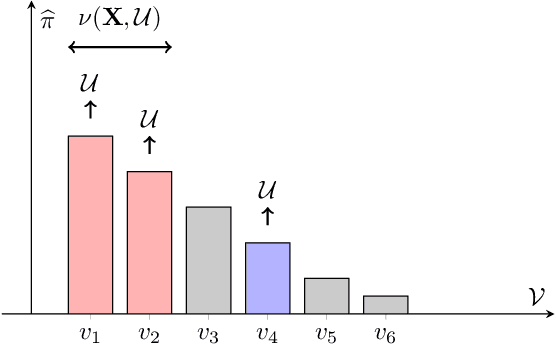
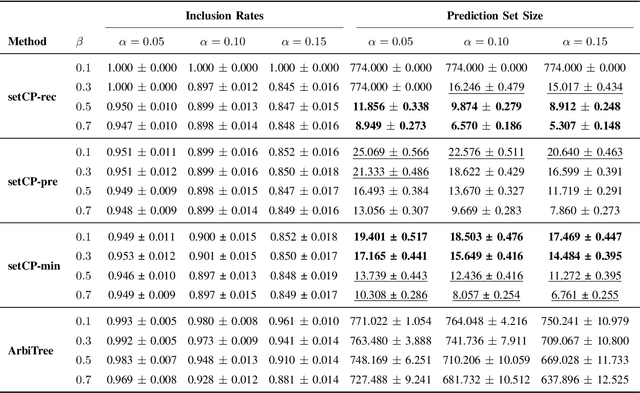
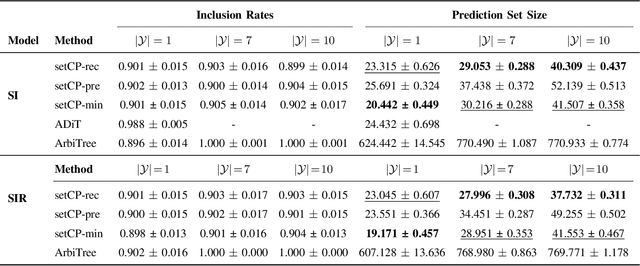
Detecting the origin of information or infection spread in networks is a fundamental challenge with applications in misinformation tracking, epidemiology, and beyond. We study the multi-source detection problem: given snapshot observations of node infection status on a graph, estimate the set of source nodes that initiated the propagation. Existing methods either lack statistical guarantees or are limited to specific diffusion models and assumptions. We propose a novel conformal prediction framework that provides statistically valid recall guarantees for source set detection, independent of the underlying diffusion process or data distribution. Our approach introduces principled score functions to quantify the alignment between predicted probabilities and true sources, and leverages a calibration set to construct prediction sets with user-specified recall and coverage levels. The method is applicable to both single- and multi-source scenarios, supports general network diffusion dynamics, and is computationally efficient for large graphs. Empirical results demonstrate that our method achieves rigorous coverage with competitive accuracy, outperforming existing baselines in both reliability and scalability.The code is available online.
Adaptive Multi-view Graph Contrastive Learning via Fractional-order Neural Diffusion Networks
Nov 09, 2025Graph contrastive learning (GCL) learns node and graph representations by contrasting multiple views of the same graph. Existing methods typically rely on fixed, handcrafted views-usually a local and a global perspective, which limits their ability to capture multi-scale structural patterns. We present an augmentation-free, multi-view GCL framework grounded in fractional-order continuous dynamics. By varying the fractional derivative order $α\in (0,1]$, our encoders produce a continuous spectrum of views: small $α$ yields localized features, while large $α$ induces broader, global aggregation. We treat $α$ as a learnable parameter so the model can adapt diffusion scales to the data and automatically discover informative views. This principled approach generates diverse, complementary representations without manual augmentations. Extensive experiments on standard benchmarks demonstrate that our method produces more robust and expressive embeddings and outperforms state-of-the-art GCL baselines.
Modulo Video Recovery via Selective Spatiotemporal Vision Transformer
Nov 09, 2025



Conventional image sensors have limited dynamic range, causing saturation in high-dynamic-range (HDR) scenes. Modulo cameras address this by folding incident irradiance into a bounded range, yet require specialized unwrapping algorithms to reconstruct the underlying signal. Unlike HDR recovery, which extends dynamic range from conventional sampling, modulo recovery restores actual values from folded samples. Despite being introduced over a decade ago, progress in modulo image recovery has been slow, especially in the use of modern deep learning techniques. In this work, we demonstrate that standard HDR methods are unsuitable for modulo recovery. Transformers, however, can capture global dependencies and spatial-temporal relationships crucial for resolving folded video frames. Still, adapting existing Transformer architectures for modulo recovery demands novel techniques. To this end, we present Selective Spatiotemporal Vision Transformer (SSViT), the first deep learning framework for modulo video reconstruction. SSViT employs a token selection strategy to improve efficiency and concentrate on the most critical regions. Experiments confirm that SSViT produces high-quality reconstructions from 8-bit folded videos and achieves state-of-the-art performance in modulo video recovery.
CodeBoost: Boosting Code LLMs by Squeezing Knowledge from Code Snippets with RL
Aug 07, 2025Code large language models (LLMs) have become indispensable tools for building efficient and automated coding pipelines. Existing models are typically post-trained using reinforcement learning (RL) from general-purpose LLMs using "human instruction-final answer" pairs, where the instructions are usually from manual annotations. However, collecting high-quality coding instructions is both labor-intensive and difficult to scale. On the other hand, code snippets are abundantly available from various sources. This imbalance presents a major bottleneck in instruction-based post-training. We propose CodeBoost, a post-training framework that enhances code LLMs purely from code snippets, without relying on human-annotated instructions. CodeBoost introduces the following key components: (1) maximum-clique curation, which selects a representative and diverse training corpus from code; (2) bi-directional prediction, which enables the model to learn from both forward and backward prediction objectives; (3) error-aware prediction, which incorporates learning signals from both correct and incorrect outputs; (4) heterogeneous augmentation, which diversifies the training distribution to enrich code semantics; and (5) heterogeneous rewarding, which guides model learning through multiple reward types including format correctness and execution feedback from both successes and failures. Extensive experiments across several code LLMs and benchmarks verify that CodeBoost consistently improves performance, demonstrating its effectiveness as a scalable and effective training pipeline.
UAVScenes: A Multi-Modal Dataset for UAVs
Jul 30, 2025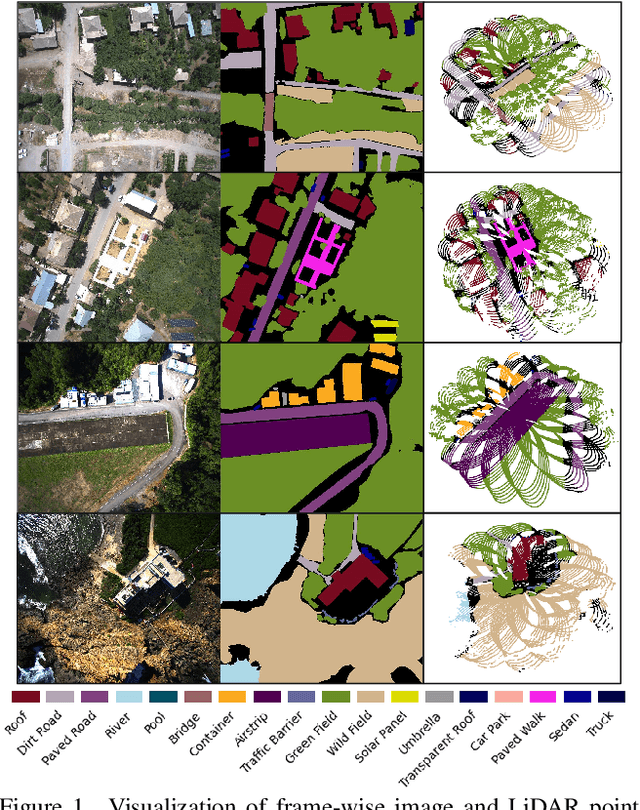
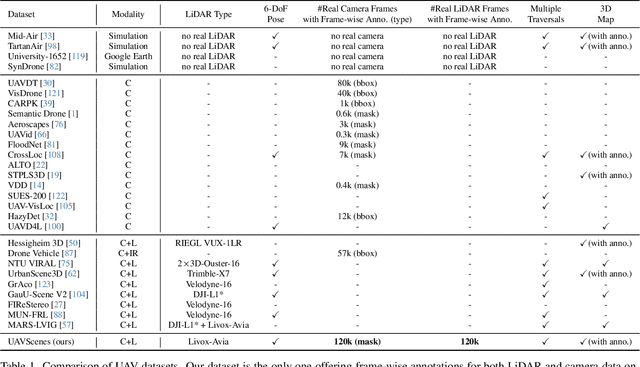
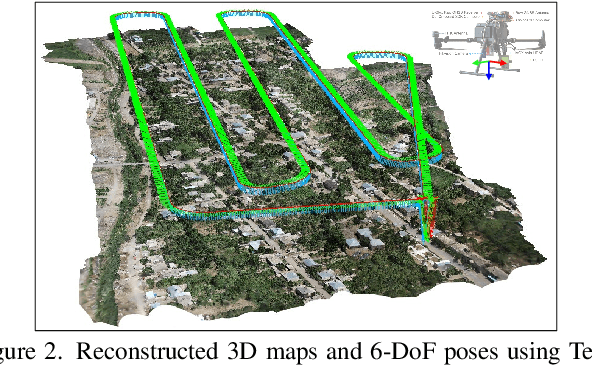
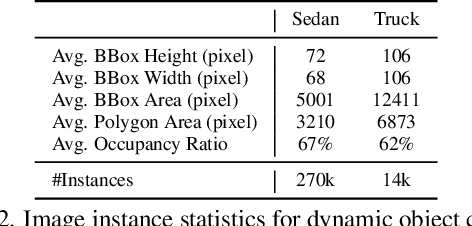
Multi-modal perception is essential for unmanned aerial vehicle (UAV) operations, as it enables a comprehensive understanding of the UAVs' surrounding environment. However, most existing multi-modal UAV datasets are primarily biased toward localization and 3D reconstruction tasks, or only support map-level semantic segmentation due to the lack of frame-wise annotations for both camera images and LiDAR point clouds. This limitation prevents them from being used for high-level scene understanding tasks. To address this gap and advance multi-modal UAV perception, we introduce UAVScenes, a large-scale dataset designed to benchmark various tasks across both 2D and 3D modalities. Our benchmark dataset is built upon the well-calibrated multi-modal UAV dataset MARS-LVIG, originally developed only for simultaneous localization and mapping (SLAM). We enhance this dataset by providing manually labeled semantic annotations for both frame-wise images and LiDAR point clouds, along with accurate 6-degree-of-freedom (6-DoF) poses. These additions enable a wide range of UAV perception tasks, including segmentation, depth estimation, 6-DoF localization, place recognition, and novel view synthesis (NVS). Our dataset is available at https://github.com/sijieaaa/UAVScenes
Simple Graph Contrastive Learning via Fractional-order Neural Diffusion Networks
Apr 24, 2025Graph Contrastive Learning (GCL) has recently made progress as an unsupervised graph representation learning paradigm. GCL approaches can be categorized into augmentation-based and augmentation-free methods. The former relies on complex data augmentations, while the latter depends on encoders that can generate distinct views of the same input. Both approaches may require negative samples for training. In this paper, we introduce a novel augmentation-free GCL framework based on graph neural diffusion models. Specifically, we utilize learnable encoders governed by Fractional Differential Equations (FDE). Each FDE is characterized by an order parameter of the differential operator. We demonstrate that varying these parameters allows us to produce learnable encoders that generate diverse views, capturing either local or global information, for contrastive learning. Our model does not require negative samples for training and is applicable to both homophilic and heterophilic datasets. We demonstrate its effectiveness across various datasets, achieving state-of-the-art performance.
Efficient Training of Neural Fractional-Order Differential Equation via Adjoint Backpropagation
Mar 20, 2025
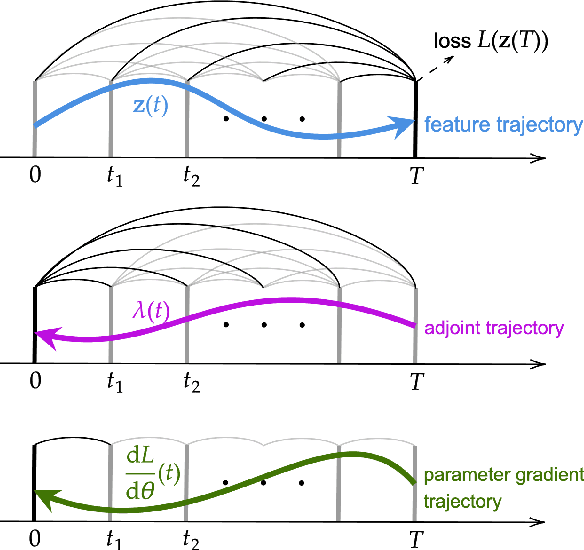


Fractional-order differential equations (FDEs) enhance traditional differential equations by extending the order of differential operators from integers to real numbers, offering greater flexibility in modeling complex dynamical systems with nonlocal characteristics. Recent progress at the intersection of FDEs and deep learning has catalyzed a new wave of innovative models, demonstrating the potential to address challenges such as graph representation learning. However, training neural FDEs has primarily relied on direct differentiation through forward-pass operations in FDE numerical solvers, leading to increased memory usage and computational complexity, particularly in large-scale applications. To address these challenges, we propose a scalable adjoint backpropagation method for training neural FDEs by solving an augmented FDE backward in time, which substantially reduces memory requirements. This approach provides a practical neural FDE toolbox and holds considerable promise for diverse applications. We demonstrate the effectiveness of our method in several tasks, achieving performance comparable to baseline models while significantly reducing computational overhead.