 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLongSpike: Fractional Order Spiking State Space Models for Efficient Long Sequence Learning
Jun 11, 2026Spiking Neural Networks (SNNs) are well-regarded for their biological plausibility and energy efficiency in processing sequential data. However, dominant SNN architectures typically rely on first-order Ordinary Differential Equations (ODEs) to govern neuronal state transitions. This first-order assumption imposes a "memoryless" bottleneck, limiting the model's capacity to capture the complex, long-range dependencies inherent in long-sequence tasks. In this work, we propose LongSpike, a novel SNN framework that integrates fractional-order State-Space Modeling, or f-SSM, from control theory into the spiking domain. By extending traditional integer-order SSMs to the fractional-calculus regime, LongSpike enables the hierarchical integration of neuronal dynamics with long-memory kernels. To mitigate the computational overhead and parallelization challenges typically associated with fractional operators, we leverage a state-space formulation that supports efficient, parallel training. Empirical evaluations on challenging benchmarks, including Long Range Arena (LRA), large-scale WikiText-103, and Speech Commands, demonstrate that LongSpike outperforms state-of-the-art SNNs in accuracy while preserving sparse synaptic computation. The code is available at https://github.com/xinruihe389-commits/LongSpike.
Lyapunov Stable Graph Neural Flow
Mar 13, 2026Graph Neural Networks (GNNs) are highly vulnerable to adversarial perturbations in both topology and features, making the learning of robust representations a critical challenge. In this work, we bridge GNNs with control theory to introduce a novel defense framework grounded in integer- and fractional-order Lyapunov stability. Unlike conventional strategies that rely on resource-heavy adversarial training or data purification, our approach fundamentally constrains the underlying feature-update dynamics of the GNN. We propose an adaptive, learnable Lyapunov function paired with a novel projection mechanism that maps the network's state into a stable space, thereby offering theoretically provable stability guarantees. Notably, this mechanism is orthogonal to existing defenses, allowing for seamless integration with techniques like adversarial training to achieve cumulative robustness. Extensive experiments demonstrate that our Lyapunov-stable graph neural flows substantially outperform base neural flows and state-of-the-art baselines across standard benchmarks and various adversarial attack scenarios.
Fractional Spike Differential Equations Neural Network with Efficient Adjoint Parameters Training
Jul 22, 2025Spiking Neural Networks (SNNs) draw inspiration from biological neurons to create realistic models for brain-like computation, demonstrating effectiveness in processing temporal information with energy efficiency and biological realism. Most existing SNNs assume a single time constant for neuronal membrane voltage dynamics, modeled by first-order ordinary differential equations (ODEs) with Markovian characteristics. Consequently, the voltage state at any time depends solely on its immediate past value, potentially limiting network expressiveness. Real neurons, however, exhibit complex dynamics influenced by long-term correlations and fractal dendritic structures, suggesting non-Markovian behavior. Motivated by this, we propose the Fractional SPIKE Differential Equation neural network (fspikeDE), which captures long-term dependencies in membrane voltage and spike trains through fractional-order dynamics. These fractional dynamics enable more expressive temporal patterns beyond the capability of integer-order models. For efficient training of fspikeDE, we introduce a gradient descent algorithm that optimizes parameters by solving an augmented fractional-order ODE (FDE) backward in time using adjoint sensitivity methods. Extensive experiments on diverse image and graph datasets demonstrate that fspikeDE consistently outperforms traditional SNNs, achieving superior accuracy, comparable energy efficiency, reduced training memory usage, and enhanced robustness against noise. Our approach provides a novel open-sourced computational toolbox for fractional-order SNNs, widely applicable to various real-world tasks.
Simple Graph Contrastive Learning via Fractional-order Neural Diffusion Networks
Apr 24, 2025Graph Contrastive Learning (GCL) has recently made progress as an unsupervised graph representation learning paradigm. GCL approaches can be categorized into augmentation-based and augmentation-free methods. The former relies on complex data augmentations, while the latter depends on encoders that can generate distinct views of the same input. Both approaches may require negative samples for training. In this paper, we introduce a novel augmentation-free GCL framework based on graph neural diffusion models. Specifically, we utilize learnable encoders governed by Fractional Differential Equations (FDE). Each FDE is characterized by an order parameter of the differential operator. We demonstrate that varying these parameters allows us to produce learnable encoders that generate diverse views, capturing either local or global information, for contrastive learning. Our model does not require negative samples for training and is applicable to both homophilic and heterophilic datasets. We demonstrate its effectiveness across various datasets, achieving state-of-the-art performance.
Neural Variable-Order Fractional Differential Equation Networks
Mar 20, 2025


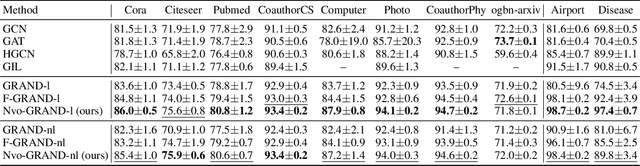
Neural differential equation models have garnered significant attention in recent years for their effectiveness in machine learning applications.Among these, fractional differential equations (FDEs) have emerged as a promising tool due to their ability to capture memory-dependent dynamics, which are often challenging to model with traditional integer-order approaches.While existing models have primarily focused on constant-order fractional derivatives, variable-order fractional operators offer a more flexible and expressive framework for modeling complex memory patterns. In this work, we introduce the Neural Variable-Order Fractional Differential Equation network (NvoFDE), a novel neural network framework that integrates variable-order fractional derivatives with learnable neural networks.Our framework allows for the modeling of adaptive derivative orders dependent on hidden features, capturing more complex feature-updating dynamics and providing enhanced flexibility. We conduct extensive experiments across multiple graph datasets to validate the effectiveness of our approach.Our results demonstrate that NvoFDE outperforms traditional constant-order fractional and integer models across a range of tasks, showcasing its superior adaptability and performance.
Efficient Training of Neural Fractional-Order Differential Equation via Adjoint Backpropagation
Mar 20, 2025
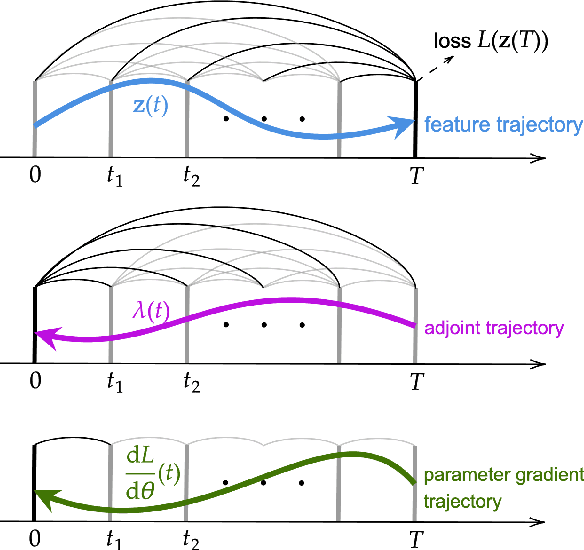


Fractional-order differential equations (FDEs) enhance traditional differential equations by extending the order of differential operators from integers to real numbers, offering greater flexibility in modeling complex dynamical systems with nonlocal characteristics. Recent progress at the intersection of FDEs and deep learning has catalyzed a new wave of innovative models, demonstrating the potential to address challenges such as graph representation learning. However, training neural FDEs has primarily relied on direct differentiation through forward-pass operations in FDE numerical solvers, leading to increased memory usage and computational complexity, particularly in large-scale applications. To address these challenges, we propose a scalable adjoint backpropagation method for training neural FDEs by solving an augmented FDE backward in time, which substantially reduces memory requirements. This approach provides a practical neural FDE toolbox and holds considerable promise for diverse applications. We demonstrate the effectiveness of our method in several tasks, achieving performance comparable to baseline models while significantly reducing computational overhead.
Distributed-Order Fractional Graph Operating Network
Nov 08, 2024



We introduce the Distributed-order fRActional Graph Operating Network (DRAGON), a novel continuous Graph Neural Network (GNN) framework that incorporates distributed-order fractional calculus. Unlike traditional continuous GNNs that utilize integer-order or single fractional-order differential equations, DRAGON uses a learnable probability distribution over a range of real numbers for the derivative orders. By allowing a flexible and learnable superposition of multiple derivative orders, our framework captures complex graph feature updating dynamics beyond the reach of conventional models. We provide a comprehensive interpretation of our framework's capability to capture intricate dynamics through the lens of a non-Markovian graph random walk with node feature updating driven by an anomalous diffusion process over the graph. Furthermore, to highlight the versatility of the DRAGON framework, we conduct empirical evaluations across a range of graph learning tasks. The results consistently demonstrate superior performance when compared to traditional continuous GNN models. The implementation code is available at \url{https://github.com/zknus/NeurIPS-2024-DRAGON}.
PRFusion: Toward Effective and Robust Multi-Modal Place Recognition with Image and Point Cloud Fusion
Oct 07, 2024Place recognition plays a crucial role in the fields of robotics and computer vision, finding applications in areas such as autonomous driving, mapping, and localization. Place recognition identifies a place using query sensor data and a known database. One of the main challenges is to develop a model that can deliver accurate results while being robust to environmental variations. We propose two multi-modal place recognition models, namely PRFusion and PRFusion++. PRFusion utilizes global fusion with manifold metric attention, enabling effective interaction between features without requiring camera-LiDAR extrinsic calibrations. In contrast, PRFusion++ assumes the availability of extrinsic calibrations and leverages pixel-point correspondences to enhance feature learning on local windows. Additionally, both models incorporate neural diffusion layers, which enable reliable operation even in challenging environments. We verify the state-of-the-art performance of both models on three large-scale benchmarks. Notably, they outperform existing models by a substantial margin of +3.0 AR@1 on the demanding Boreas dataset. Furthermore, we conduct ablation studies to validate the effectiveness of our proposed methods. The codes are available at: https://github.com/sijieaaa/PRFusion
Unleashing the Potential of Fractional Calculus in Graph Neural Networks with FROND
Apr 26, 2024



We introduce the FRactional-Order graph Neural Dynamical network (FROND), a new continuous graph neural network (GNN) framework. Unlike traditional continuous GNNs that rely on integer-order differential equations, FROND employs the Caputo fractional derivative to leverage the non-local properties of fractional calculus. This approach enables the capture of long-term dependencies in feature updates, moving beyond the Markovian update mechanisms in conventional integer-order models and offering enhanced capabilities in graph representation learning. We offer an interpretation of the node feature updating process in FROND from a non-Markovian random walk perspective when the feature updating is particularly governed by a diffusion process. We demonstrate analytically that oversmoothing can be mitigated in this setting. Experimentally, we validate the FROND framework by comparing the fractional adaptations of various established integer-order continuous GNNs, demonstrating their consistently improved performance and underscoring the framework's potential as an effective extension to enhance traditional continuous GNNs. The code is available at \url{https://github.com/zknus/ICLR2024-FROND}.
PointDifformer: Robust Point Cloud Registration With Neural Diffusion and Transformer
Apr 22, 2024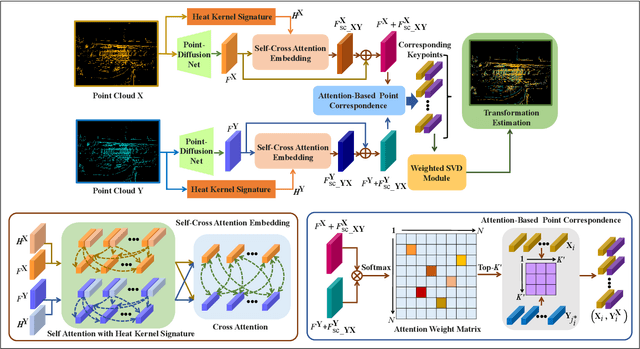
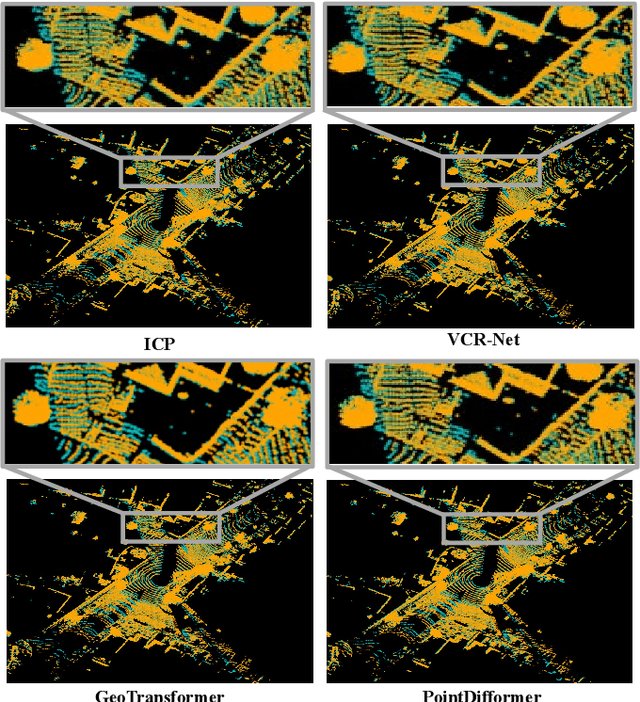
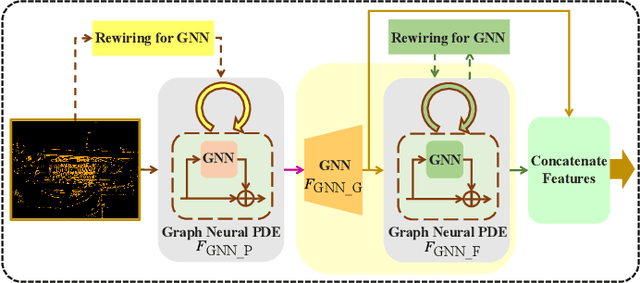
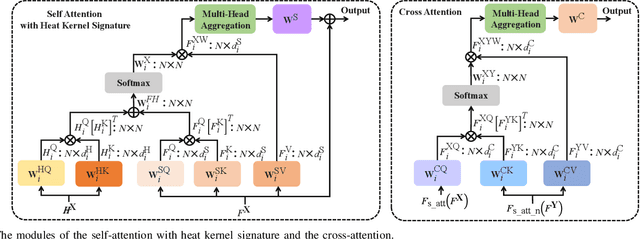
Point cloud registration is a fundamental technique in 3-D computer vision with applications in graphics, autonomous driving, and robotics. However, registration tasks under challenging conditions, under which noise or perturbations are prevalent, can be difficult. We propose a robust point cloud registration approach that leverages graph neural partial differential equations (PDEs) and heat kernel signatures. Our method first uses graph neural PDE modules to extract high dimensional features from point clouds by aggregating information from the 3-D point neighborhood, thereby enhancing the robustness of the feature representations. Then, we incorporate heat kernel signatures into an attention mechanism to efficiently obtain corresponding keypoints. Finally, a singular value decomposition (SVD) module with learnable weights is used to predict the transformation between two point clouds. Empirical experiments on a 3-D point cloud dataset demonstrate that our approach not only achieves state-of-the-art performance for point cloud registration but also exhibits better robustness to additive noise or 3-D shape perturbations.