 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCodeBoost: Boosting Code LLMs by Squeezing Knowledge from Code Snippets with RL
Aug 07, 2025Code large language models (LLMs) have become indispensable tools for building efficient and automated coding pipelines. Existing models are typically post-trained using reinforcement learning (RL) from general-purpose LLMs using "human instruction-final answer" pairs, where the instructions are usually from manual annotations. However, collecting high-quality coding instructions is both labor-intensive and difficult to scale. On the other hand, code snippets are abundantly available from various sources. This imbalance presents a major bottleneck in instruction-based post-training. We propose CodeBoost, a post-training framework that enhances code LLMs purely from code snippets, without relying on human-annotated instructions. CodeBoost introduces the following key components: (1) maximum-clique curation, which selects a representative and diverse training corpus from code; (2) bi-directional prediction, which enables the model to learn from both forward and backward prediction objectives; (3) error-aware prediction, which incorporates learning signals from both correct and incorrect outputs; (4) heterogeneous augmentation, which diversifies the training distribution to enrich code semantics; and (5) heterogeneous rewarding, which guides model learning through multiple reward types including format correctness and execution feedback from both successes and failures. Extensive experiments across several code LLMs and benchmarks verify that CodeBoost consistently improves performance, demonstrating its effectiveness as a scalable and effective training pipeline.
UAVScenes: A Multi-Modal Dataset for UAVs
Jul 30, 2025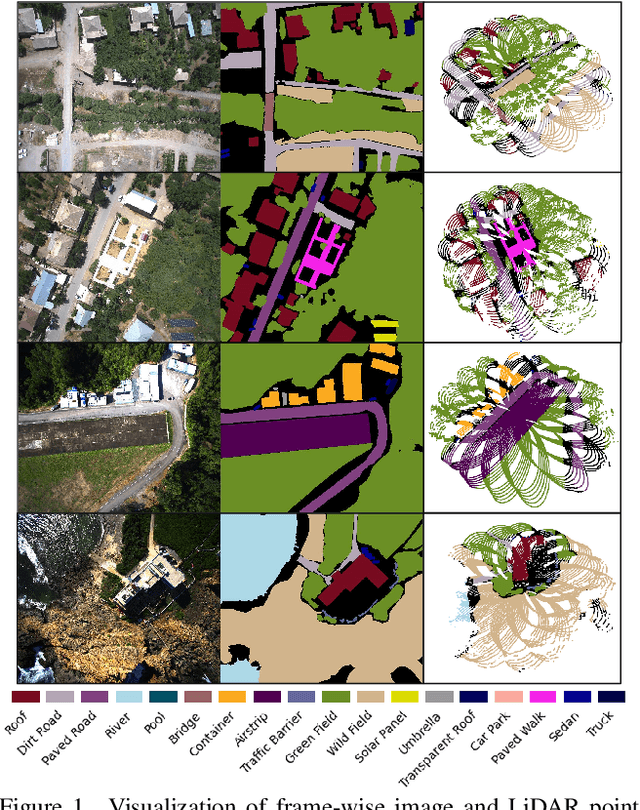
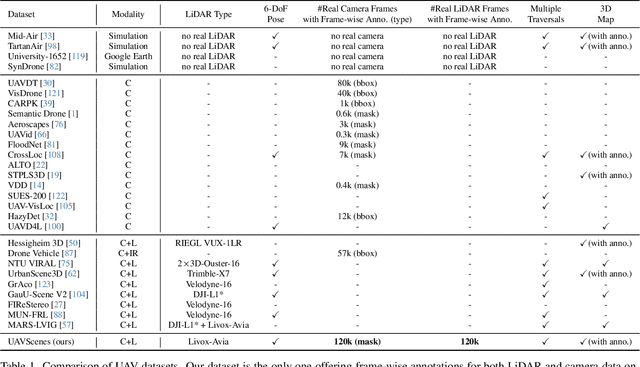
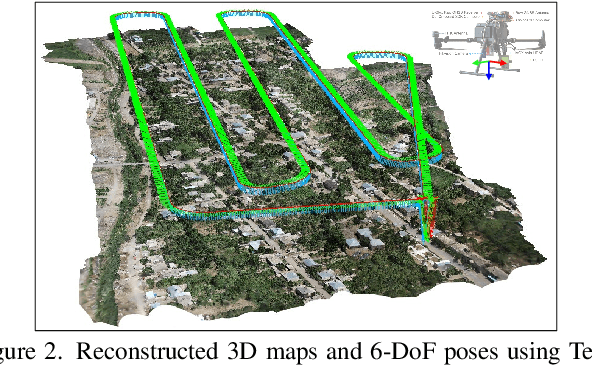
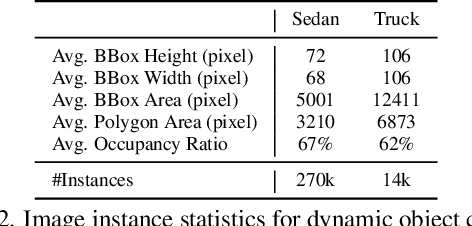
Multi-modal perception is essential for unmanned aerial vehicle (UAV) operations, as it enables a comprehensive understanding of the UAVs' surrounding environment. However, most existing multi-modal UAV datasets are primarily biased toward localization and 3D reconstruction tasks, or only support map-level semantic segmentation due to the lack of frame-wise annotations for both camera images and LiDAR point clouds. This limitation prevents them from being used for high-level scene understanding tasks. To address this gap and advance multi-modal UAV perception, we introduce UAVScenes, a large-scale dataset designed to benchmark various tasks across both 2D and 3D modalities. Our benchmark dataset is built upon the well-calibrated multi-modal UAV dataset MARS-LVIG, originally developed only for simultaneous localization and mapping (SLAM). We enhance this dataset by providing manually labeled semantic annotations for both frame-wise images and LiDAR point clouds, along with accurate 6-degree-of-freedom (6-DoF) poses. These additions enable a wide range of UAV perception tasks, including segmentation, depth estimation, 6-DoF localization, place recognition, and novel view synthesis (NVS). Our dataset is available at https://github.com/sijieaaa/UAVScenes
AgentDNS: A Root Domain Naming System for LLM Agents
May 28, 2025The rapid evolution of Large Language Model (LLM) agents has highlighted critical challenges in cross-vendor service discovery, interoperability, and communication. Existing protocols like model context protocol and agent-to-agent protocol have made significant strides in standardizing interoperability between agents and tools, as well as communication among multi-agents. However, there remains a lack of standardized protocols and solutions for service discovery across different agent and tool vendors. In this paper, we propose AgentDNS, a root domain naming and service discovery system designed to enable LLM agents to autonomously discover, resolve, and securely invoke third-party agent and tool services across organizational and technological boundaries. Inspired by the principles of the traditional DNS, AgentDNS introduces a structured mechanism for service registration, semantic service discovery, secure invocation, and unified billing. We detail the architecture, core functionalities, and use cases of AgentDNS, demonstrating its potential to streamline multi-agent collaboration in real-world scenarios. The source code will be published on https://github.com/agentdns.
PRFusion: Toward Effective and Robust Multi-Modal Place Recognition with Image and Point Cloud Fusion
Oct 07, 2024Place recognition plays a crucial role in the fields of robotics and computer vision, finding applications in areas such as autonomous driving, mapping, and localization. Place recognition identifies a place using query sensor data and a known database. One of the main challenges is to develop a model that can deliver accurate results while being robust to environmental variations. We propose two multi-modal place recognition models, namely PRFusion and PRFusion++. PRFusion utilizes global fusion with manifold metric attention, enabling effective interaction between features without requiring camera-LiDAR extrinsic calibrations. In contrast, PRFusion++ assumes the availability of extrinsic calibrations and leverages pixel-point correspondences to enhance feature learning on local windows. Additionally, both models incorporate neural diffusion layers, which enable reliable operation even in challenging environments. We verify the state-of-the-art performance of both models on three large-scale benchmarks. Notably, they outperform existing models by a substantial margin of +3.0 AR@1 on the demanding Boreas dataset. Furthermore, we conduct ablation studies to validate the effectiveness of our proposed methods. The codes are available at: https://github.com/sijieaaa/PRFusion
FedSheafHN: Personalized Federated Learning on Graph-structured Data
May 25, 2024

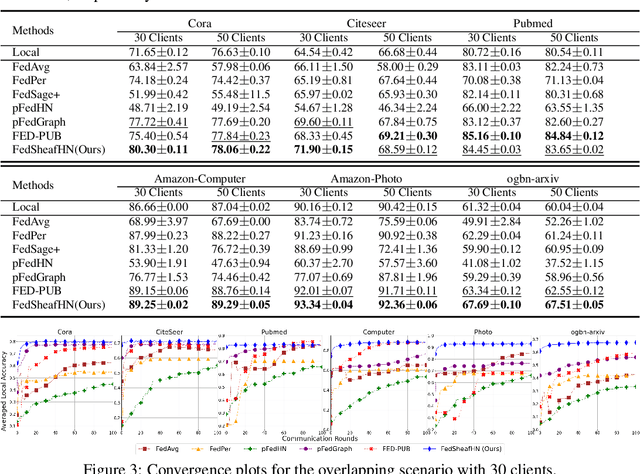

Personalized subgraph Federated Learning (FL) is a task that customizes Graph Neural Networks (GNNs) to individual client needs, accommodating diverse data distributions. However, applying hypernetworks in FL, while aiming to facilitate model personalization, often encounters challenges due to inadequate representation of client-specific characteristics. To overcome these limitations, we propose a model called FedSheafHN, using enhanced collaboration graph embedding and efficient personalized model parameter generation. Specifically, our model embeds each client's local subgraph into a server-constructed collaboration graph. We utilize sheaf diffusion in the collaboration graph to learn client representations. Our model improves the integration and interpretation of complex client characteristics. Furthermore, our model ensures the generation of personalized models through advanced hypernetworks optimized for parallel operations across clients. Empirical evaluations demonstrate that FedSheafHN outperforms existing methods in most scenarios, in terms of client model performance on various graph-structured datasets. It also has fast model convergence and effective new clients generalization.
PointDifformer: Robust Point Cloud Registration With Neural Diffusion and Transformer
Apr 22, 2024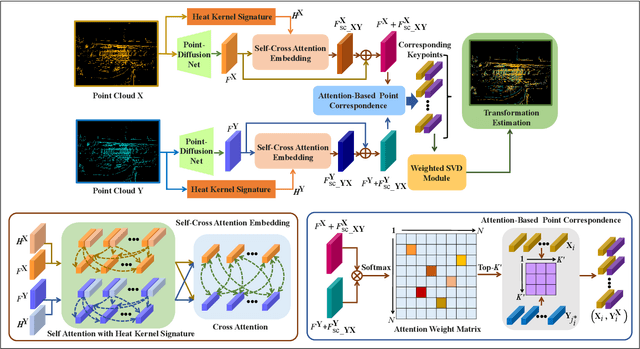
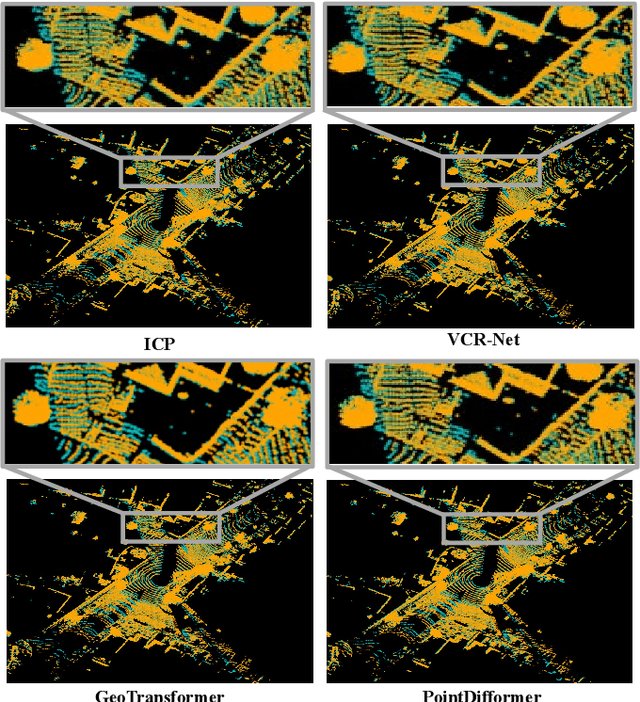
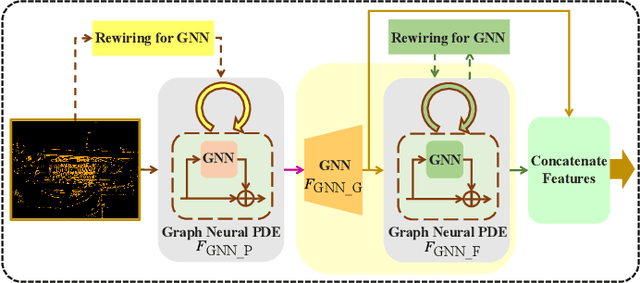
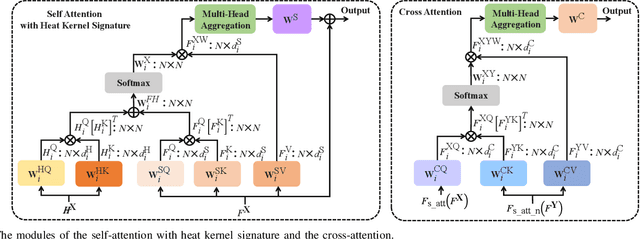
Point cloud registration is a fundamental technique in 3-D computer vision with applications in graphics, autonomous driving, and robotics. However, registration tasks under challenging conditions, under which noise or perturbations are prevalent, can be difficult. We propose a robust point cloud registration approach that leverages graph neural partial differential equations (PDEs) and heat kernel signatures. Our method first uses graph neural PDE modules to extract high dimensional features from point clouds by aggregating information from the 3-D point neighborhood, thereby enhancing the robustness of the feature representations. Then, we incorporate heat kernel signatures into an attention mechanism to efficiently obtain corresponding keypoints. Finally, a singular value decomposition (SVD) module with learnable weights is used to predict the transformation between two point clouds. Empirical experiments on a 3-D point cloud dataset demonstrate that our approach not only achieves state-of-the-art performance for point cloud registration but also exhibits better robustness to additive noise or 3-D shape perturbations.
Coupling Graph Neural Networks with Fractional Order Continuous Dynamics: A Robustness Study
Jan 09, 2024



In this work, we rigorously investigate the robustness of graph neural fractional-order differential equation (FDE) models. This framework extends beyond traditional graph neural (integer-order) ordinary differential equation (ODE) models by implementing the time-fractional Caputo derivative. Utilizing fractional calculus allows our model to consider long-term memory during the feature updating process, diverging from the memoryless Markovian updates seen in traditional graph neural ODE models. The superiority of graph neural FDE models over graph neural ODE models has been established in environments free from attacks or perturbations. While traditional graph neural ODE models have been verified to possess a degree of stability and resilience in the presence of adversarial attacks in existing literature, the robustness of graph neural FDE models, especially under adversarial conditions, remains largely unexplored. This paper undertakes a detailed assessment of the robustness of graph neural FDE models. We establish a theoretical foundation outlining the robustness characteristics of graph neural FDE models, highlighting that they maintain more stringent output perturbation bounds in the face of input and graph topology disturbances, compared to their integer-order counterparts. Our empirical evaluations further confirm the enhanced robustness of graph neural FDE models, highlighting their potential in adversarially robust applications.
PosDiffNet: Positional Neural Diffusion for Point Cloud Registration in a Large Field of View with Perturbations
Jan 06, 2024Point cloud registration is a crucial technique in 3D computer vision with a wide range of applications. However, this task can be challenging, particularly in large fields of view with dynamic objects, environmental noise, or other perturbations. To address this challenge, we propose a model called PosDiffNet. Our approach performs hierarchical registration based on window-level, patch-level, and point-level correspondence. We leverage a graph neural partial differential equation (PDE) based on Beltrami flow to obtain high-dimensional features and position embeddings for point clouds. We incorporate position embeddings into a Transformer module based on a neural ordinary differential equation (ODE) to efficiently represent patches within points. We employ the multi-level correspondence derived from the high feature similarity scores to facilitate alignment between point clouds. Subsequently, we use registration methods such as SVD-based algorithms to predict the transformation using corresponding point pairs. We evaluate PosDiffNet on several 3D point cloud datasets, verifying that it achieves state-of-the-art (SOTA) performance for point cloud registration in large fields of view with perturbations. The implementation code of experiments is available at https://github.com/AI-IT-AVs/PosDiffNet.
DistilVPR: Cross-Modal Knowledge Distillation for Visual Place Recognition
Dec 17, 2023The utilization of multi-modal sensor data in visual place recognition (VPR) has demonstrated enhanced performance compared to single-modal counterparts. Nonetheless, integrating additional sensors comes with elevated costs and may not be feasible for systems that demand lightweight operation, thereby impacting the practical deployment of VPR. To address this issue, we resort to knowledge distillation, which empowers single-modal students to learn from cross-modal teachers without introducing additional sensors during inference. Despite the notable advancements achieved by current distillation approaches, the exploration of feature relationships remains an under-explored area. In order to tackle the challenge of cross-modal distillation in VPR, we present DistilVPR, a novel distillation pipeline for VPR. We propose leveraging feature relationships from multiple agents, including self-agents and cross-agents for teacher and student neural networks. Furthermore, we integrate various manifolds, characterized by different space curvatures for exploring feature relationships. This approach enhances the diversity of feature relationships, including Euclidean, spherical, and hyperbolic relationship modules, thereby enhancing the overall representational capacity. The experiments demonstrate that our proposed pipeline achieves state-of-the-art performance compared to other distillation baselines. We also conduct necessary ablation studies to show design effectiveness. The code is released at: https://github.com/sijieaaa/DistilVPR
Learning Channel Capacity with Neural Mutual Information Estimator Based on Message Importance Measure
Dec 04, 2023Channel capacity estimation plays a crucial role in beyond 5G intelligent communications. Despite its significance, this task is challenging for a majority of channels, especially for the complex channels not modeled as the well-known typical ones. Recently, neural networks have been used in mutual information estimation and optimization. They are particularly considered as efficient tools for learning channel capacity. In this paper, we propose a cooperative framework to simultaneously estimate channel capacity and design the optimal codebook. First, we will leverage MIM-based GAN, a novel form of generative adversarial network (GAN) using message importance measure (MIM) as the information distance, into mutual information estimation, and develop a novel method, named MIM-based mutual information estimator (MMIE). Then, we design a generalized cooperative framework for channel capacity learning, in which a generator is regarded as an encoder producing the channel input, while a discriminator is the mutual information estimator that assesses the performance of the generator. Through the adversarial training, the generator automatically learns the optimal codebook and the discriminator estimates the channel capacity. Numerical experiments will demonstrate that compared with several conventional estimators, the MMIE achieves state-of-the-art performance in terms of accuracy and stability.