 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTHUD++: Large-Scale Dynamic Indoor Scene Dataset and Benchmark for Mobile Robots
Dec 11, 2024
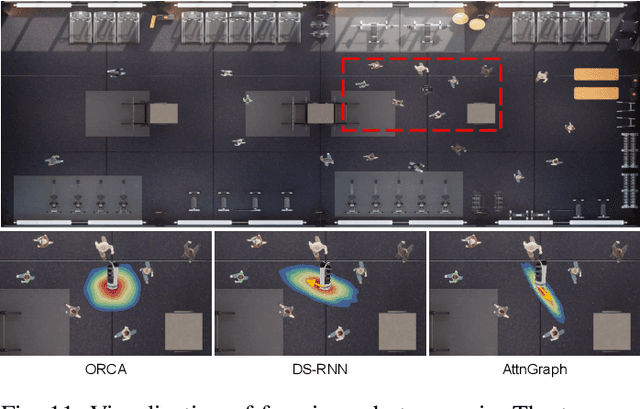


Most existing mobile robotic datasets primarily capture static scenes, limiting their utility for evaluating robotic performance in dynamic environments. To address this, we present a mobile robot oriented large-scale indoor dataset, denoted as THUD++ (TsingHua University Dynamic) robotic dataset, for dynamic scene understanding. Our current dataset includes 13 large-scale dynamic scenarios, combining both real-world and synthetic data collected with a real robot platform and a physical simulation platform, respectively. The RGB-D dataset comprises over 90K image frames, 20M 2D/3D bounding boxes of static and dynamic objects, camera poses, and IMU. The trajectory dataset covers over 6,000 pedestrian trajectories in indoor scenes. Additionally, the dataset is augmented with a Unity3D-based simulation platform, allowing researchers to create custom scenes and test algorithms in a controlled environment. We evaluate state-of-the-art methods on THUD++ across mainstream indoor scene understanding tasks, e.g., 3D object detection, semantic segmentation, relocalization, pedestrian trajectory prediction, and navigation. Our experiments highlight the challenges mobile robots encounter in indoor environments, especially when navigating in complex, crowded, and dynamic scenes. By sharing this dataset, we aim to accelerate the development and testing of mobile robot algorithms, contributing to real-world robotic applications.
2DGS-Room: Seed-Guided 2D Gaussian Splatting with Geometric Constrains for High-Fidelity Indoor Scene Reconstruction
Dec 04, 2024



The reconstruction of indoor scenes remains challenging due to the inherent complexity of spatial structures and the prevalence of textureless regions. Recent advancements in 3D Gaussian Splatting have improved novel view synthesis with accelerated processing but have yet to deliver comparable performance in surface reconstruction. In this paper, we introduce 2DGS-Room, a novel method leveraging 2D Gaussian Splatting for high-fidelity indoor scene reconstruction. Specifically, we employ a seed-guided mechanism to control the distribution of 2D Gaussians, with the density of seed points dynamically optimized through adaptive growth and pruning mechanisms. To further improve geometric accuracy, we incorporate monocular depth and normal priors to provide constraints for details and textureless regions respectively. Additionally, multi-view consistency constraints are employed to mitigate artifacts and further enhance reconstruction quality. Extensive experiments on ScanNet and ScanNet++ datasets demonstrate that our method achieves state-of-the-art performance in indoor scene reconstruction.
Fine-detailed Neural Indoor Scene Reconstruction using multi-level importance sampling and multi-view consistency
Oct 10, 2024



Recently, neural implicit 3D reconstruction in indoor scenarios has become popular due to its simplicity and impressive performance. Previous works could produce complete results leveraging monocular priors of normal or depth. However, they may suffer from over-smoothed reconstructions and long-time optimization due to unbiased sampling and inaccurate monocular priors. In this paper, we propose a novel neural implicit surface reconstruction method, named FD-NeuS, to learn fine-detailed 3D models using multi-level importance sampling strategy and multi-view consistency methodology. Specifically, we leverage segmentation priors to guide region-based ray sampling, and use piecewise exponential functions as weights to pilot 3D points sampling along the rays, ensuring more attention on important regions. In addition, we introduce multi-view feature consistency and multi-view normal consistency as supervision and uncertainty respectively, which further improve the reconstruction of details. Extensive quantitative and qualitative results show that FD-NeuS outperforms existing methods in various scenes.
Mobile Robot Oriented Large-Scale Indoor Dataset for Dynamic Scene Understanding
Jun 28, 2024Most existing robotic datasets capture static scene data and thus are limited in evaluating robots' dynamic performance. To address this, we present a mobile robot oriented large-scale indoor dataset, denoted as THUD (Tsinghua University Dynamic) robotic dataset, for training and evaluating their dynamic scene understanding algorithms. Specifically, the THUD dataset construction is first detailed, including organization, acquisition, and annotation methods. It comprises both real-world and synthetic data, collected with a real robot platform and a physical simulation platform, respectively. Our current dataset includes 13 larges-scale dynamic scenarios, 90K image frames, 20M 2D/3D bounding boxes of static and dynamic objects, camera poses, and IMU. The dataset is still continuously expanding. Then, the performance of mainstream indoor scene understanding tasks, e.g. 3D object detection, semantic segmentation, and robot relocalization, is evaluated on our THUD dataset. These experiments reveal serious challenges for some robot scene understanding tasks in dynamic scenes. By sharing this dataset, we aim to foster and iterate new mobile robot algorithms quickly for robot actual working dynamic environment, i.e. complex crowded dynamic scenes.
GaussianRoom: Improving 3D Gaussian Splatting with SDF Guidance and Monocular Cues for Indoor Scene Reconstruction
May 30, 2024



Recently, 3D Gaussian Splatting(3DGS) has revolutionized neural rendering with its high-quality rendering and real-time speed. However, when it comes to indoor scenes with a significant number of textureless areas, 3DGS yields incomplete and noisy reconstruction results due to the poor initialization of the point cloud and under-constrained optimization. Inspired by the continuity of signed distance field (SDF), which naturally has advantages in modeling surfaces, we present a unified optimizing framework integrating neural SDF with 3DGS. This framework incorporates a learnable neural SDF field to guide the densification and pruning of Gaussians, enabling Gaussians to accurately model scenes even with poor initialized point clouds. At the same time, the geometry represented by Gaussians improves the efficiency of the SDF field by piloting its point sampling. Additionally, we regularize the optimization with normal and edge priors to eliminate geometry ambiguity in textureless areas and improve the details. Extensive experiments in ScanNet and ScanNet++ show that our method achieves state-of-the-art performance in both surface reconstruction and novel view synthesis.
Knowledge-Assisted Dual-Stage Evolutionary Optimization of Large-Scale Crude Oil Scheduling
Jan 09, 2024



With the scaling up of crude oil scheduling in modern refineries, large-scale crude oil scheduling problems (LSCOSPs) emerge with thousands of binary variables and non-linear constraints, which are challenging to be optimized by traditional optimization methods. To solve LSCOSPs, we take the practical crude oil scheduling from a marine-access refinery as an example and start with modeling LSCOSPs from crude unloading, transportation, crude distillation unit processing, and inventory management of intermediate products. On the basis of the proposed model, a dual-stage evolutionary algorithm driven by heuristic rules (denoted by DSEA/HR) is developed, where the dual-stage search mechanism consists of global search and local refinement. In the global search stage, we devise several heuristic rules based on the empirical operating knowledge to generate a well-performing initial population and accelerate convergence in the mixed variables space. In the local refinement stage, a repair strategy is proposed to move the infeasible solutions towards feasible regions by further optimizing the local continuous variables. During the whole evolutionary process, the proposed dual-stage framework plays a crucial role in balancing exploration and exploitation. Experimental results have shown that DSEA/HR outperforms the state-of-the-art and widely-used mathematical programming methods and metaheuristic algorithms on LSCOSP instances within a reasonable time.