 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSeed2Scale: A Self-Evolving Data Engine for Embodied AI via Small to Large Model Synergy and Multimodal Evaluation
Mar 09, 2026Existing data generation methods suffer from exploration limits, embodiment gaps, and low signal-to-noise ratios, leading to performance degradation during self-iteration. To address these challenges, we propose Seed2Scale, a self-evolving data engine that overcomes the data bottleneck through a heterogeneous synergy of "small-model collection, large-model evaluation, and target-model learning". Starting with as few as four seed demonstrations, the engine employs the lightweight Vision-Language-Action model, SuperTiny, as a dedicated collector, leveraging its strong inductive bias for robust exploration in parallel environments. Concurrently, a pre-trained Vision-Language Model is integrated as a Verifer to autonomously perform success/failure judgment and quality scoring for the massive generated trajectories. Seed2Scale effectively mitigates model collapse, ensuring the stability of the self-evolution process. Experimental results demonstrate that Seed2Scale exhibits signifcant scaling potential: as iterations progress, the success rate of the target model shows a robust upward trend, achieving a performance improvement of 131.2%. Furthermore, Seed2Scale signifcantly outperforms existing data augmentation methods, providing a scalable and cost-effective pathway for the large-scale development of Generalist Embodied AI. Project page: https://terminators2025.github.io/Seed2Scale.github.io
MirrorLimb: Implementing hand pose acquisition and robot teleoperation based on RealMirror
Nov 12, 2025In this work, we present a PICO-based robot remote operating framework that enables low-cost, real-time acquisition of hand motion and pose data, outperforming mainstream visual tracking and motion capture solutions in terms of cost-effectiveness. The framework is natively compatible with the RealMirror ecosystem, offering ready-to-use functionality for stable and precise robotic trajectory recording within the Isaac simulation environment, thereby facilitating the construction of Vision-Language-Action (VLA) datasets. Additionally, the system supports real-time teleoperation of a variety of end-effector-equipped robots, including dexterous hands and robotic grippers. This work aims to lower the technical barriers in the study of upper-limb robotic manipulation, thereby accelerating advancements in VLA-related research.
RealMirror: A Comprehensive, Open-Source Vision-Language-Action Platform for Embodied AI
Sep 18, 2025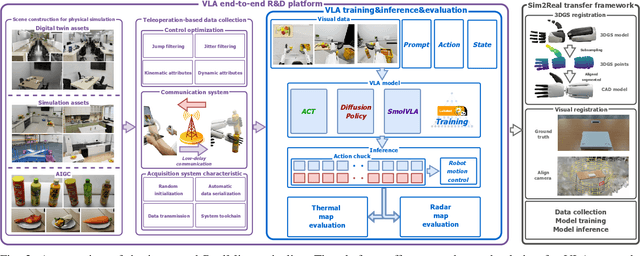
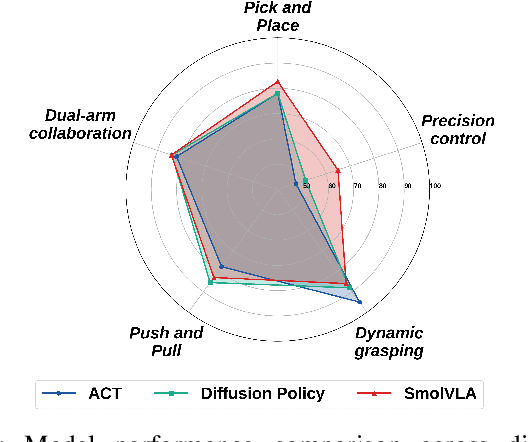
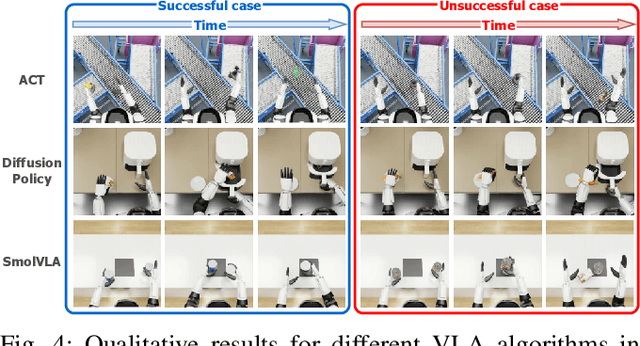
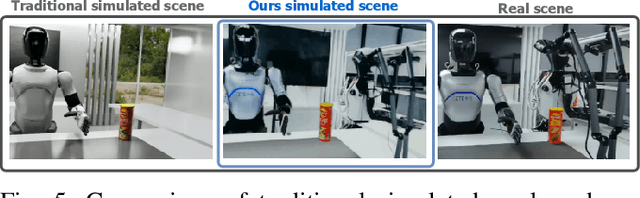
The emerging field of Vision-Language-Action (VLA) for humanoid robots faces several fundamental challenges, including the high cost of data acquisition, the lack of a standardized benchmark, and the significant gap between simulation and the real world. To overcome these obstacles, we propose RealMirror, a comprehensive, open-source embodied AI VLA platform. RealMirror builds an efficient, low-cost data collection, model training, and inference system that enables end-to-end VLA research without requiring a real robot. To facilitate model evolution and fair comparison, we also introduce a dedicated VLA benchmark for humanoid robots, featuring multiple scenarios, extensive trajectories, and various VLA models. Furthermore, by integrating generative models and 3D Gaussian Splatting to reconstruct realistic environments and robot models, we successfully demonstrate zero-shot Sim2Real transfer, where models trained exclusively on simulation data can perform tasks on a real robot seamlessly, without any fine-tuning. In conclusion, with the unification of these critical components, RealMirror provides a robust framework that significantly accelerates the development of VLA models for humanoid robots. Project page: https://terminators2025.github.io/RealMirror.github.io
Mobile Robot Oriented Large-Scale Indoor Dataset for Dynamic Scene Understanding
Jun 28, 2024Most existing robotic datasets capture static scene data and thus are limited in evaluating robots' dynamic performance. To address this, we present a mobile robot oriented large-scale indoor dataset, denoted as THUD (Tsinghua University Dynamic) robotic dataset, for training and evaluating their dynamic scene understanding algorithms. Specifically, the THUD dataset construction is first detailed, including organization, acquisition, and annotation methods. It comprises both real-world and synthetic data, collected with a real robot platform and a physical simulation platform, respectively. Our current dataset includes 13 larges-scale dynamic scenarios, 90K image frames, 20M 2D/3D bounding boxes of static and dynamic objects, camera poses, and IMU. The dataset is still continuously expanding. Then, the performance of mainstream indoor scene understanding tasks, e.g. 3D object detection, semantic segmentation, and robot relocalization, is evaluated on our THUD dataset. These experiments reveal serious challenges for some robot scene understanding tasks in dynamic scenes. By sharing this dataset, we aim to foster and iterate new mobile robot algorithms quickly for robot actual working dynamic environment, i.e. complex crowded dynamic scenes.
GRID: Scene-Graph-based Instruction-driven Robotic Task Planning
Sep 14, 2023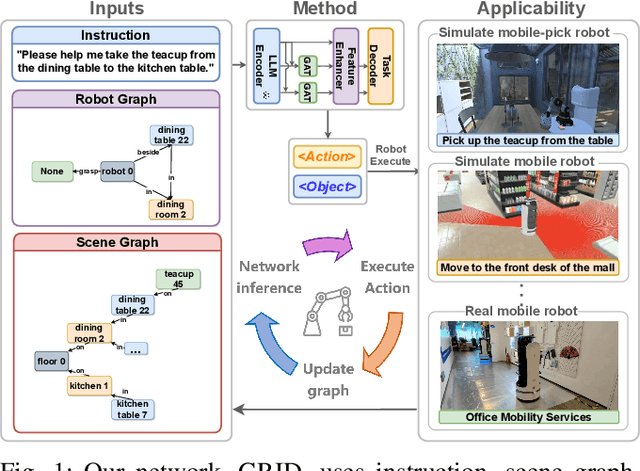
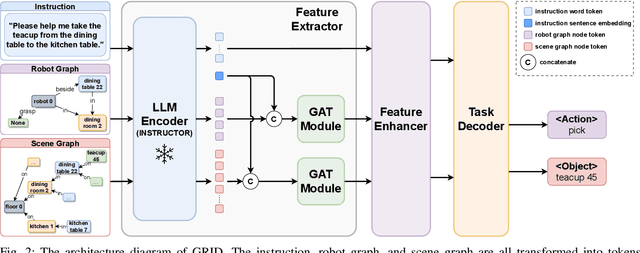
Recent works have shown that Large Language Models (LLMs) can promote grounding instructions to robotic task planning. Despite the progress, most existing works focused on utilizing raw images to help LLMs understand environmental information, which not only limits the observation scope but also typically requires massive multimodal data collection and large-scale models. In this paper, we propose a novel approach called Graph-based Robotic Instruction Decomposer (GRID), leverages scene graph instead of image to perceive global scene information and continuously plans subtask in each stage for a given instruction. Our method encodes object attributes and relationships in graphs through an LLM and Graph Attention Networks, integrating instruction features to predict subtasks consisting of pre-defined robot actions and target objects in the scene graph. This strategy enables robots to acquire semantic knowledge widely observed in the environment from the scene graph. To train and evaluate GRID, we build a dataset construction pipeline to generate synthetic datasets in graph-based robotic task planning. Experiments have shown that our method outperforms GPT-4 by over 25.4% in subtask accuracy and 43.6% in task accuracy. Experiments conducted on datasets of unseen scenes and scenes with different numbers of objects showed that the task accuracy of GRID declined by at most 3.8%, which demonstrates its good cross-scene generalization ability. We validate our method in both physical simulation and the real world.