 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMirrorLimb: Implementing hand pose acquisition and robot teleoperation based on RealMirror
Nov 12, 2025In this work, we present a PICO-based robot remote operating framework that enables low-cost, real-time acquisition of hand motion and pose data, outperforming mainstream visual tracking and motion capture solutions in terms of cost-effectiveness. The framework is natively compatible with the RealMirror ecosystem, offering ready-to-use functionality for stable and precise robotic trajectory recording within the Isaac simulation environment, thereby facilitating the construction of Vision-Language-Action (VLA) datasets. Additionally, the system supports real-time teleoperation of a variety of end-effector-equipped robots, including dexterous hands and robotic grippers. This work aims to lower the technical barriers in the study of upper-limb robotic manipulation, thereby accelerating advancements in VLA-related research.
RealMirror: A Comprehensive, Open-Source Vision-Language-Action Platform for Embodied AI
Sep 18, 2025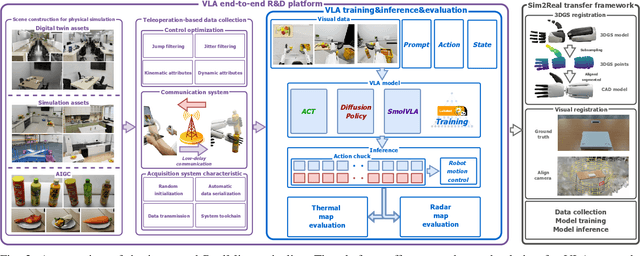
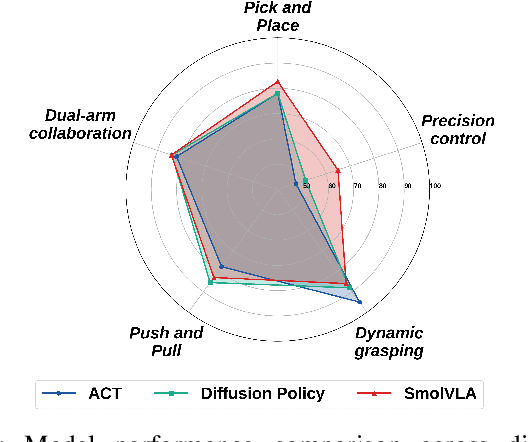
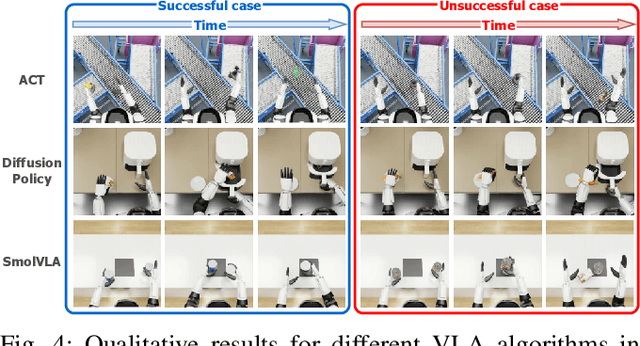
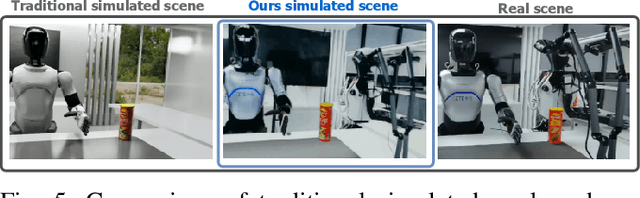
The emerging field of Vision-Language-Action (VLA) for humanoid robots faces several fundamental challenges, including the high cost of data acquisition, the lack of a standardized benchmark, and the significant gap between simulation and the real world. To overcome these obstacles, we propose RealMirror, a comprehensive, open-source embodied AI VLA platform. RealMirror builds an efficient, low-cost data collection, model training, and inference system that enables end-to-end VLA research without requiring a real robot. To facilitate model evolution and fair comparison, we also introduce a dedicated VLA benchmark for humanoid robots, featuring multiple scenarios, extensive trajectories, and various VLA models. Furthermore, by integrating generative models and 3D Gaussian Splatting to reconstruct realistic environments and robot models, we successfully demonstrate zero-shot Sim2Real transfer, where models trained exclusively on simulation data can perform tasks on a real robot seamlessly, without any fine-tuning. In conclusion, with the unification of these critical components, RealMirror provides a robust framework that significantly accelerates the development of VLA models for humanoid robots. Project page: https://terminators2025.github.io/RealMirror.github.io
2DGS-Room: Seed-Guided 2D Gaussian Splatting with Geometric Constrains for High-Fidelity Indoor Scene Reconstruction
Dec 04, 2024



The reconstruction of indoor scenes remains challenging due to the inherent complexity of spatial structures and the prevalence of textureless regions. Recent advancements in 3D Gaussian Splatting have improved novel view synthesis with accelerated processing but have yet to deliver comparable performance in surface reconstruction. In this paper, we introduce 2DGS-Room, a novel method leveraging 2D Gaussian Splatting for high-fidelity indoor scene reconstruction. Specifically, we employ a seed-guided mechanism to control the distribution of 2D Gaussians, with the density of seed points dynamically optimized through adaptive growth and pruning mechanisms. To further improve geometric accuracy, we incorporate monocular depth and normal priors to provide constraints for details and textureless regions respectively. Additionally, multi-view consistency constraints are employed to mitigate artifacts and further enhance reconstruction quality. Extensive experiments on ScanNet and ScanNet++ datasets demonstrate that our method achieves state-of-the-art performance in indoor scene reconstruction.
GaussianRoom: Improving 3D Gaussian Splatting with SDF Guidance and Monocular Cues for Indoor Scene Reconstruction
May 30, 2024



Recently, 3D Gaussian Splatting(3DGS) has revolutionized neural rendering with its high-quality rendering and real-time speed. However, when it comes to indoor scenes with a significant number of textureless areas, 3DGS yields incomplete and noisy reconstruction results due to the poor initialization of the point cloud and under-constrained optimization. Inspired by the continuity of signed distance field (SDF), which naturally has advantages in modeling surfaces, we present a unified optimizing framework integrating neural SDF with 3DGS. This framework incorporates a learnable neural SDF field to guide the densification and pruning of Gaussians, enabling Gaussians to accurately model scenes even with poor initialized point clouds. At the same time, the geometry represented by Gaussians improves the efficiency of the SDF field by piloting its point sampling. Additionally, we regularize the optimization with normal and edge priors to eliminate geometry ambiguity in textureless areas and improve the details. Extensive experiments in ScanNet and ScanNet++ show that our method achieves state-of-the-art performance in both surface reconstruction and novel view synthesis.
PolyU-BPCoMa: A Dataset and Benchmark Towards Mobile Colorized Mapping Using a Backpack Multisensorial System
Jun 15, 2022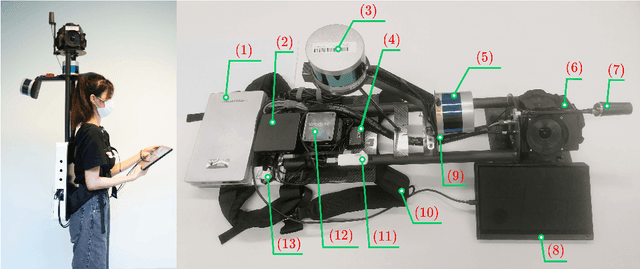
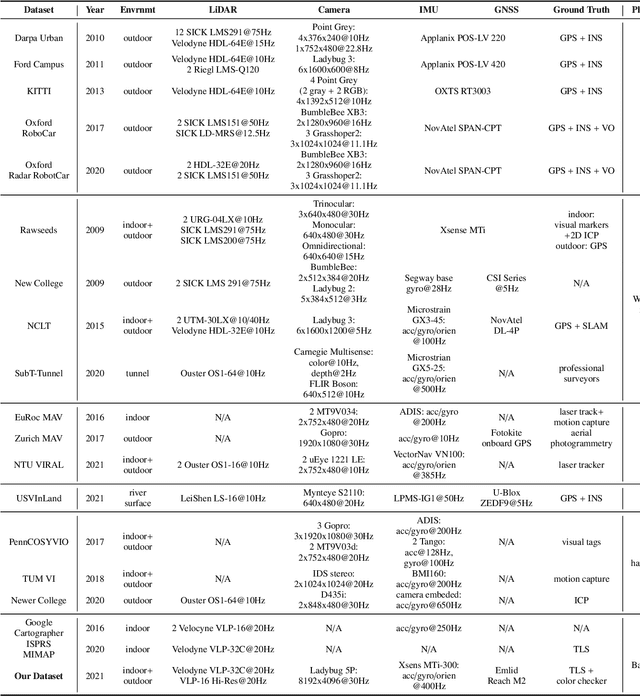
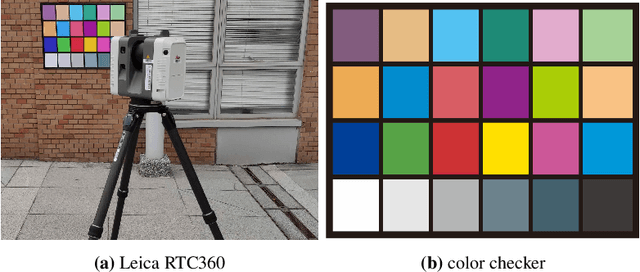

Constructing colorized point clouds from mobile laser scanning and images is a fundamental work in surveying and mapping. It is also an essential prerequisite for building digital twins for smart cities. However, existing public datasets are either in relatively small scales or lack accurate geometrical and color ground truth. This paper documents a multisensorial dataset named PolyU-BPCoMA which is distinctively positioned towards mobile colorized mapping. The dataset incorporates resources of 3D LiDAR, spherical imaging, GNSS and IMU on a backpack platform. Color checker boards are pasted in each surveyed area as targets and ground truth data are collected by an advanced terrestrial laser scanner (TLS). 3D geometrical and color information can be recovered in the colorized point clouds produced by the backpack system and the TLS, respectively. Accordingly, we provide an opportunity to benchmark the mapping and colorization accuracy simultaneously for a mobile multisensorial system. The dataset is approximately 800 GB in size covering both indoor and outdoor environments. The dataset and development kits are available at https://github.com/chenpengxin/PolyU-BPCoMa.git.