 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePolyU-BPCoMa: A Dataset and Benchmark Towards Mobile Colorized Mapping Using a Backpack Multisensorial System
Jun 15, 2022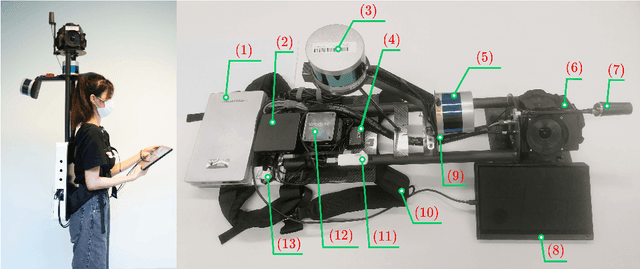
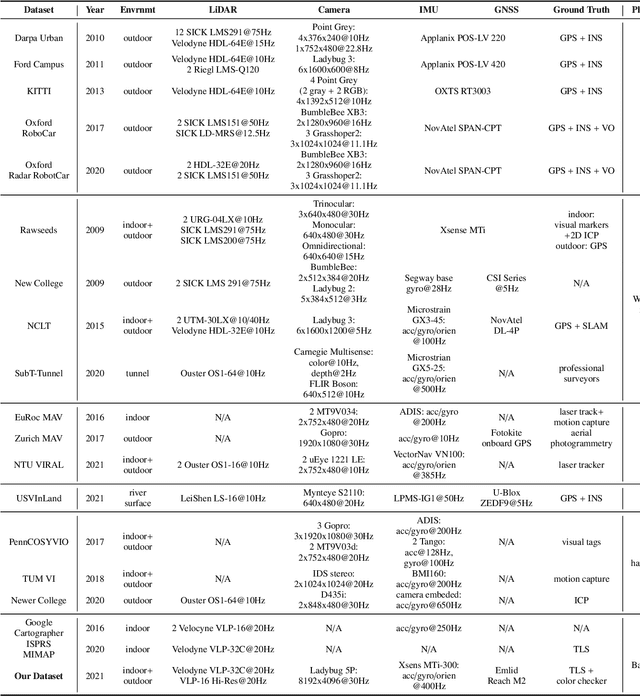
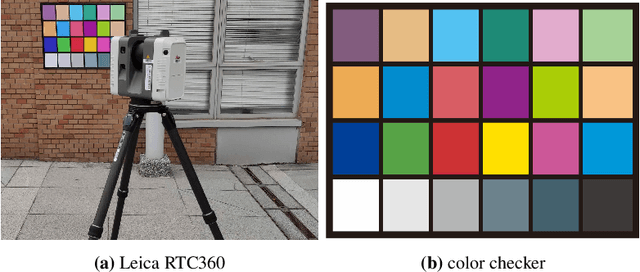

Constructing colorized point clouds from mobile laser scanning and images is a fundamental work in surveying and mapping. It is also an essential prerequisite for building digital twins for smart cities. However, existing public datasets are either in relatively small scales or lack accurate geometrical and color ground truth. This paper documents a multisensorial dataset named PolyU-BPCoMA which is distinctively positioned towards mobile colorized mapping. The dataset incorporates resources of 3D LiDAR, spherical imaging, GNSS and IMU on a backpack platform. Color checker boards are pasted in each surveyed area as targets and ground truth data are collected by an advanced terrestrial laser scanner (TLS). 3D geometrical and color information can be recovered in the colorized point clouds produced by the backpack system and the TLS, respectively. Accordingly, we provide an opportunity to benchmark the mapping and colorization accuracy simultaneously for a mobile multisensorial system. The dataset is approximately 800 GB in size covering both indoor and outdoor environments. The dataset and development kits are available at https://github.com/chenpengxin/PolyU-BPCoMa.git.
Improving short-term bike sharing demand forecast through an irregular convolutional neural network
Feb 11, 2022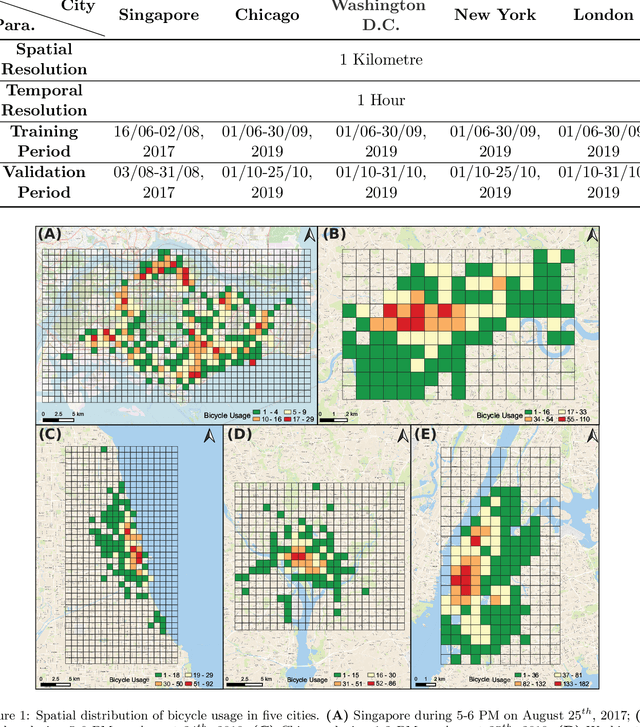
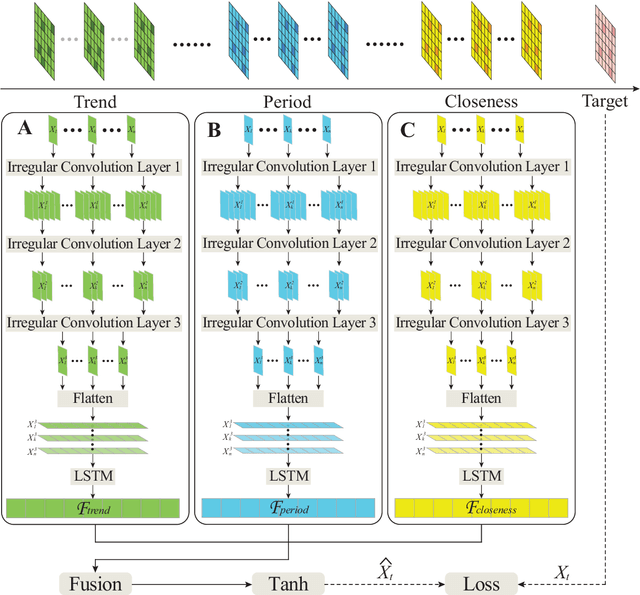
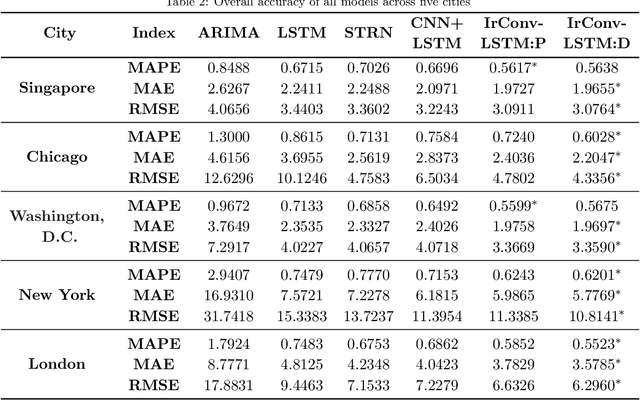
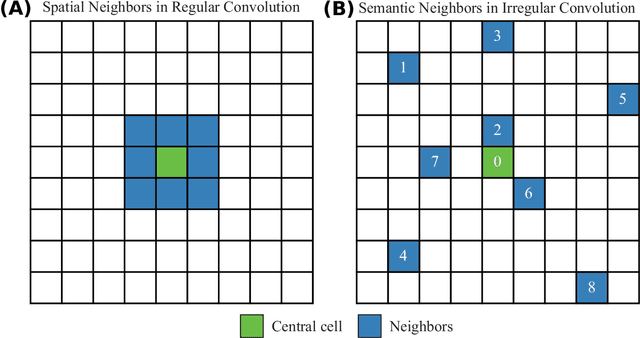
As an important task for the management of bike sharing systems, accurate forecast of travel demand could facilitate dispatch and relocation of bicycles to improve user satisfaction. In recent years, many deep learning algorithms have been introduced to improve bicycle usage forecast. A typical practice is to integrate convolutional (CNN) and recurrent neural network (RNN) to capture spatial-temporal dependency in historical travel demand. For typical CNN, the convolution operation is conducted through a kernel that moves across a "matrix-format" city to extract features over spatially adjacent urban areas. This practice assumes that areas close to each other could provide useful information that improves prediction accuracy. However, bicycle usage in neighboring areas might not always be similar, given spatial variations in built environment characteristics and travel behavior that affect cycling activities. Yet, areas that are far apart can be relatively more similar in temporal usage patterns. To utilize the hidden linkage among these distant urban areas, the study proposes an irregular convolutional Long-Short Term Memory model (IrConv+LSTM) to improve short-term bike sharing demand forecast. The model modifies traditional CNN with irregular convolutional architecture to extract dependency among "semantic neighbors". The proposed model is evaluated with a set of benchmark models in five study sites, which include one dockless bike sharing system in Singapore, and four station-based systems in Chicago, Washington, D.C., New York, and London. We find that IrConv+LSTM outperforms other benchmark models in the five cities. The model also achieves superior performance in areas with varying levels of bicycle usage and during peak periods. The findings suggest that "thinking beyond spatial neighbors" can further improve short-term travel demand prediction of urban bike sharing systems.
Extracting man-made objects from remote sensing images via fast level set evolutions
Sep 26, 2014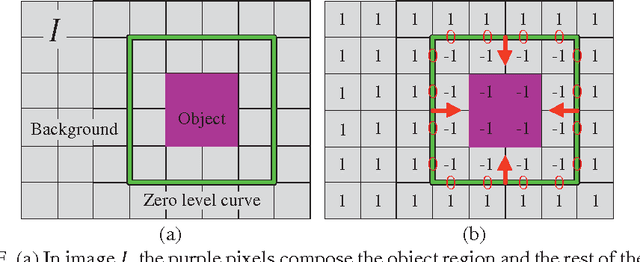
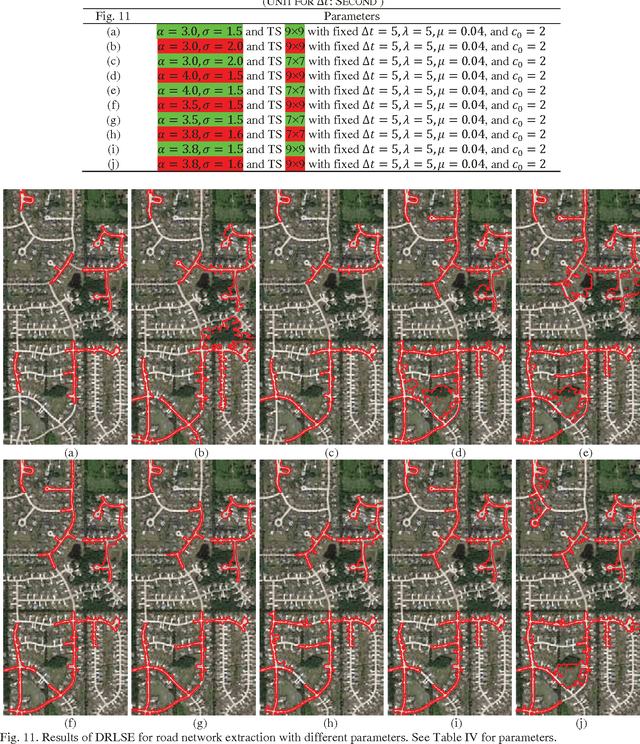
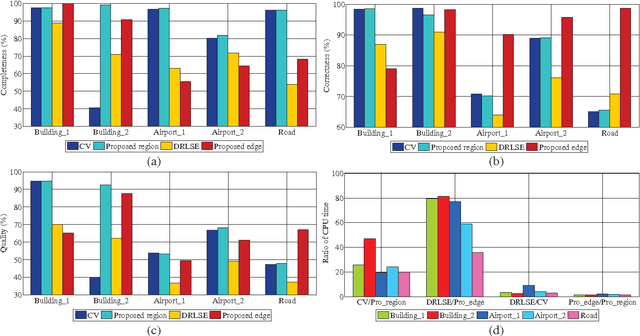
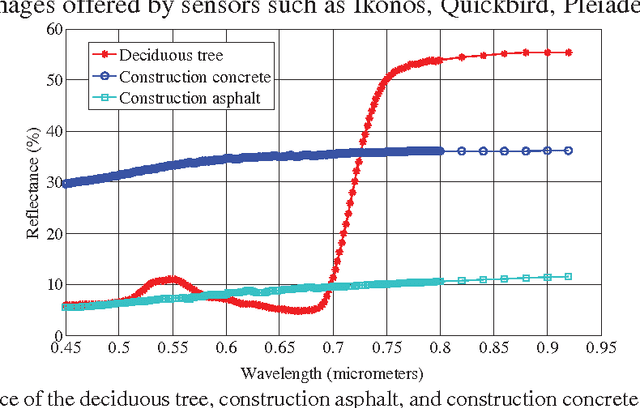
Object extraction from remote sensing images has long been an intensive research topic in the field of surveying and mapping. Most existing methods are devoted to handling just one type of object and little attention has been paid to improving the computational efficiency. In recent years, level set evolution (LSE) has been shown to be very promising for object extraction in the community of image processing and computer vision because it can handle topological changes automatically while achieving high accuracy. However, the application of state-of-the-art LSEs is compromised by laborious parameter tuning and expensive computation. In this paper, we proposed two fast LSEs for man-made object extraction from high spatial resolution remote sensing images. The traditional mean curvature-based regularization term is replaced by a Gaussian kernel and it is mathematically sound to do that. Thus a larger time step can be used in the numerical scheme to expedite the proposed LSEs. In contrast to existing methods, the proposed LSEs are significantly faster. Most importantly, they involve much fewer parameters while achieving better performance. The advantages of the proposed LSEs over other state-of-the-art approaches have been verified by a range of experiments.
* This paper includes 31 pages and 12 figures