 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDemonstrating DVS: Dynamic Virtual-Real Simulation Platform for Mobile Robotic Tasks
Apr 26, 2025With the development of embodied artificial intelligence, robotic research has increasingly focused on complex tasks. Existing simulation platforms, however, are often limited to idealized environments, simple task scenarios and lack data interoperability. This restricts task decomposition and multi-task learning. Additionally, current simulation platforms face challenges in dynamic pedestrian modeling, scene editability, and synchronization between virtual and real assets. These limitations hinder real world robot deployment and feedback. To address these challenges, we propose DVS (Dynamic Virtual-Real Simulation Platform), a platform for dynamic virtual-real synchronization in mobile robotic tasks. DVS integrates a random pedestrian behavior modeling plugin and large-scale, customizable indoor scenes for generating annotated training datasets. It features an optical motion capture system, synchronizing object poses and coordinates between virtual and real world to support dynamic task benchmarking. Experimental validation shows that DVS supports tasks such as pedestrian trajectory prediction, robot path planning, and robotic arm grasping, with potential for both simulation and real world deployment. In this way, DVS represents more than just a versatile robotic platform; it paves the way for research in human intervention in robot execution tasks and real-time feedback algorithms in virtual-real fusion environments. More information about the simulation platform is available on https://immvlab.github.io/DVS/.
VM-BHINet:Vision Mamba Bimanual Hand Interaction Network for 3D Interacting Hand Mesh Recovery From a Single RGB Image
Apr 20, 2025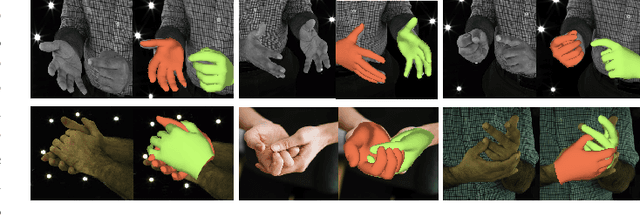



Understanding bimanual hand interactions is essential for realistic 3D pose and shape reconstruction. However, existing methods struggle with occlusions, ambiguous appearances, and computational inefficiencies. To address these challenges, we propose Vision Mamba Bimanual Hand Interaction Network (VM-BHINet), introducing state space models (SSMs) into hand reconstruction to enhance interaction modeling while improving computational efficiency. The core component, Vision Mamba Interaction Feature Extraction Block (VM-IFEBlock), combines SSMs with local and global feature operations, enabling deep understanding of hand interactions. Experiments on the InterHand2.6M dataset show that VM-BHINet reduces Mean per-joint position error (MPJPE) and Mean per-vertex position error (MPVPE) by 2-3%, significantly surpassing state-of-the-art methods.
THUD++: Large-Scale Dynamic Indoor Scene Dataset and Benchmark for Mobile Robots
Dec 11, 2024Most existing mobile robotic datasets primarily capture static scenes, limiting their utility for evaluating robotic performance in dynamic environments. To address this, we present a mobile robot oriented large-scale indoor dataset, denoted as THUD++ (TsingHua University Dynamic) robotic dataset, for dynamic scene understanding. Our current dataset includes 13 large-scale dynamic scenarios, combining both real-world and synthetic data collected with a real robot platform and a physical simulation platform, respectively. The RGB-D dataset comprises over 90K image frames, 20M 2D/3D bounding boxes of static and dynamic objects, camera poses, and IMU. The trajectory dataset covers over 6,000 pedestrian trajectories in indoor scenes. Additionally, the dataset is augmented with a Unity3D-based simulation platform, allowing researchers to create custom scenes and test algorithms in a controlled environment. We evaluate state-of-the-art methods on THUD++ across mainstream indoor scene understanding tasks, e.g., 3D object detection, semantic segmentation, relocalization, pedestrian trajectory prediction, and navigation. Our experiments highlight the challenges mobile robots encounter in indoor environments, especially when navigating in complex, crowded, and dynamic scenes. By sharing this dataset, we aim to accelerate the development and testing of mobile robot algorithms, contributing to real-world robotic applications.
End-to-End Rubbing Restoration Using Generative Adversarial Networks
May 08, 2022Rubbing restorations are significant for preserving world cultural history. In this paper, we propose the RubbingGAN model for restoring incomplete rubbing characters. Specifically, we collect characters from the Zhang Menglong Bei and build up the first rubbing restoration dataset. We design the first generative adversarial network for rubbing restoration. Based on the dataset we collect, we apply the RubbingGAN to learn the Zhang Menglong Bei font style and restore the characters. The results of experiments show that RubbingGAN can repair both slightly and severely incomplete rubbing characters fast and effectively.
UAV Aided Aerial-Ground IoT for Air Quality Sensing in Smart City: Architecture, Technologies and Implementation
Sep 11, 2018



As air pollution is becoming the largest environmental health risk, the monitoring of air quality has drawn much attention in both theoretical studies and practical implementations. In this article, we present a real-time, fine-grained and power-efficient air quality monitoring system based on aerial and ground sensing. The architecture of this system consists of four layers: the sensing layer to collect data, the transmission layer to enable bidirectional communications, the processing layer to analyze and process the data, and the presentation layer to provide graphic interface for users. Three major techniques are investigated in our implementation, given by the data processing, the deployment strategy and the power control. For data processing, spacial fitting and short-term prediction are performed to eliminate the influences of the incomplete measurement and the latency of data uploading. The deployment strategies of ground sensing and aerial sensing are investigated to improve the quality of the collected data. The power control is further considered to balance between power consumption and data accuracy. Our implementation has been deployed in Peking University and Xidian University since February 2018, and has collected about 100 thousand effective data samples by June 2018.