 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConditional Score Learning for Quickest Change Detection in Markov Transition Kernels
Nov 06, 2025We address the problem of quickest change detection in Markov processes with unknown transition kernels. The key idea is to learn the conditional score $\nabla_{\mathbf{y}} \log p(\mathbf{y}|\mathbf{x})$ directly from sample pairs $( \mathbf{x},\mathbf{y})$, where both $\mathbf{x}$ and $\mathbf{y}$ are high-dimensional data generated by the same transition kernel. In this way, we avoid explicit likelihood evaluation and provide a practical way to learn the transition dynamics. Based on this estimation, we develop a score-based CUSUM procedure that uses conditional Hyvarinen score differences to detect changes in the kernel. To ensure bounded increments, we propose a truncated version of the statistic. With Hoeffding's inequality for uniformly ergodic Markov processes, we prove exponential lower bounds on the mean time to false alarm. We also prove asymptotic upper bounds on detection delay. These results give both theoretical guarantees and practical feasibility for score-based detection in high-dimensional Markov models.
Score-Based Quickest Change Detection and Fault Identification for Multi-Stream Signals
Nov 06, 2025This paper introduces an approach to multi-stream quickest change detection and fault isolation for unnormalized and score-based statistical models. Traditional optimal algorithms in the quickest change detection literature require explicit pre-change and post-change distributions to calculate the likelihood ratio of the observations, which can be computationally expensive for higher-dimensional data and sometimes even infeasible for complex machine learning models. To address these challenges, we propose the min-SCUSUM method, a Hyvarinen score-based algorithm that computes the difference of score functions in place of log-likelihood ratios. We provide a delay and false alarm analysis of the proposed algorithm, showing that its asymptotic performance depends on the Fisher divergence between the pre- and post-change distributions. Furthermore, we establish an upper bound on the probability of fault misidentification in distinguishing the affected stream from the unaffected ones.
Quickest Change Detection with Cost-Constrained Experiment Design
Sep 17, 2025In the classical quickest change detection problem, an observer performs only one experiment to monitor a stochastic process. This paper considers the case where, at each observation time, the decision-maker needs to choose between multiple experiments with different information qualities and costs. The goal is to minimize the worst-case average detection delay subject to false alarm and cost constraints. An algorithm called the 2E-CUSUM Algorithm has been developed to achieve this goal for the two-experiment case. Extensions to multiple-experiment designs are also studied, and 2E-CUSUM is extended accordingly. Data efficiency, where the observer has the choice not to perform an experiment, is explored as well. The proposed algorithms are analyzed and shown to be asymptotically optimal.
Asymptotically Optimal Change Detection for Unnormalized Pre- and Post-Change Distributions
Oct 18, 2024This paper addresses the problem of detecting changes when only unnormalized pre- and post-change distributions are accessible. This situation happens in many scenarios in physics such as in ferromagnetism, crystallography, magneto-hydrodynamics, and thermodynamics, where the energy models are difficult to normalize. Our approach is based on the estimation of the Cumulative Sum (CUSUM) statistics, which is known to produce optimal performance. We first present an intuitively appealing approximation method. Unfortunately, this produces a biased estimator of the CUSUM statistics and may cause performance degradation. We then propose the Log-Partition Approximation Cumulative Sum (LPA-CUSUM) algorithm based on thermodynamic integration (TI) in order to estimate the log-ratio of normalizing constants of pre- and post-change distributions. It is proved that this approach gives an unbiased estimate of the log-partition function and the CUSUM statistics, and leads to an asymptotically optimal performance. Moreover, we derive a relationship between the required sample size for thermodynamic integration and the desired detection delay performance, offering guidelines for practical parameter selection. Numerical studies are provided demonstrating the efficacy of our approach.
Robust Quickest Correlation Change Detection in High-Dimensional Random Vectors
Oct 04, 2024Detecting changes in high-dimensional vectors presents significant challenges, especially when the post-change distribution is unknown and time-varying. This paper introduces a novel robust algorithm for correlation change detection in high-dimensional data. The approach utilizes the summary statistic of the maximum magnitude correlation coefficient to detect the change. This summary statistic captures the level of correlation present in the data but also has an asymptotic density. The robust test is designed using the asymptotic density. The proposed approach is robust because it can help detect a change in correlation level from some known level to unknown, time-varying levels. The proposed test is also computationally efficient and valid for a broad class of data distributions. The effectiveness of the proposed algorithm is demonstrated on simulated data.
Reactive Multi-Robot Navigation in Outdoor Environments Through Uncertainty-Aware Active Learning of Human Preference Landscape
Sep 25, 2024
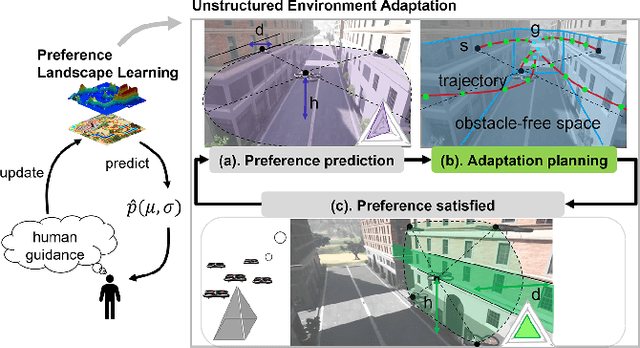
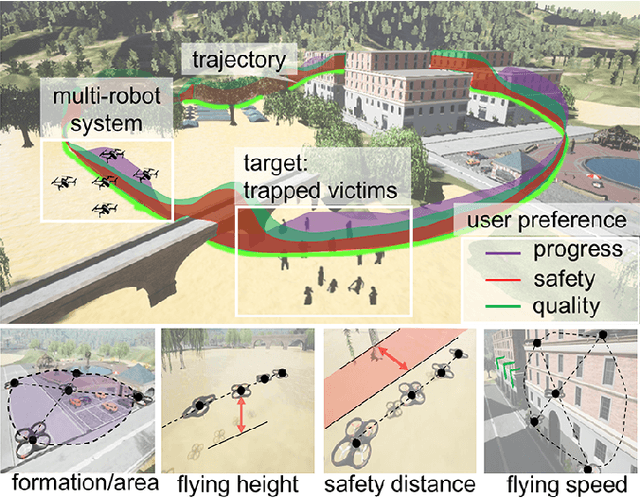
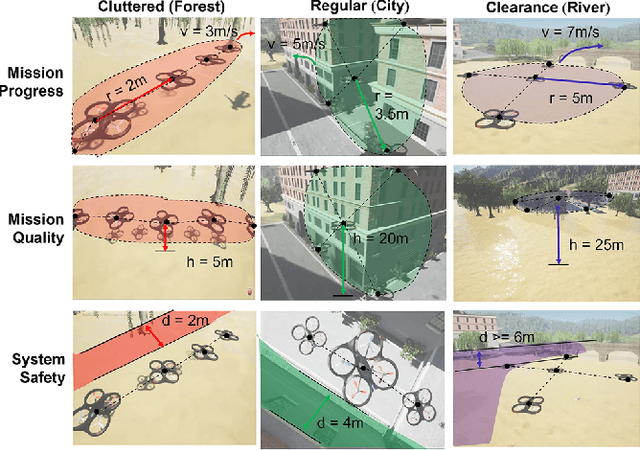
Compared with single robots, Multi-Robot Systems (MRS) can perform missions more efficiently due to the presence of multiple members with diverse capabilities. However, deploying an MRS in wide real-world environments is still challenging due to uncertain and various obstacles (e.g., building clusters and trees). With a limited understanding of environmental uncertainty on performance, an MRS cannot flexibly adjust its behaviors (e.g., teaming, load sharing, trajectory planning) to ensure both environment adaptation and task accomplishments. In this work, a novel joint preference landscape learning and behavior adjusting framework (PLBA) is designed. PLBA efficiently integrates real-time human guidance to MRS coordination and utilizes Sparse Variational Gaussian Processes with Varying Output Noise to quickly assess human preferences by leveraging spatial correlations between environment characteristics. An optimization-based behavior-adjusting method then safely adapts MRS behaviors to environments. To validate PLBA's effectiveness in MRS behavior adaption, a flood disaster search and rescue task was designed. 20 human users provided 1764 feedback based on human preferences obtained from MRS behaviors related to "task quality", "task progress", "robot safety". The prediction accuracy and adaptation speed results show the effectiveness of PLBA in preference learning and MRS behavior adaption.
Building Real-time Awareness of Out-of-distribution in Trajectory Prediction for Autonomous Vehicles
Sep 25, 2024



Trajectory prediction describes the motions of surrounding moving obstacles for an autonomous vehicle; it plays a crucial role in enabling timely decision-making, such as collision avoidance and trajectory replanning. Accurate trajectory planning is the key to reliable vehicle deployments in open-world environment, where unstructured obstacles bring in uncertainties that are impossible to fully capture by training data. For traditional machine learning tasks, such uncertainties are often addressed reasonably well via methods such as continual learning. On the one hand, naively applying those methods to trajectory prediction can result in continuous data collection and frequent model updates, which can be resource-intensive. On the other hand, the predicted trajectories can be far away from the true trajectories, leading to unsafe decision-making. In this paper, we aim to establish real-time awareness of out-of-distribution in trajectory prediction for autonomous vehicles. We focus on the challenging and practically relevant setting where the out-of-distribution is deceptive, that is, the one not easily detectable by human intuition. Drawing on the well-established techniques of sequential analysis, we build real-time awareness of out-of-distribution by monitoring prediction errors using the quickest change point detection (QCD). Our solutions are lightweight and can handle the occurrence of out-of-distribution at any time during trajectory prediction inference. Experimental results on multiple real-world datasets using a benchmark trajectory prediction model demonstrate the effectiveness of our methods.
Robust Score-Based Quickest Change Detection
Jul 15, 2024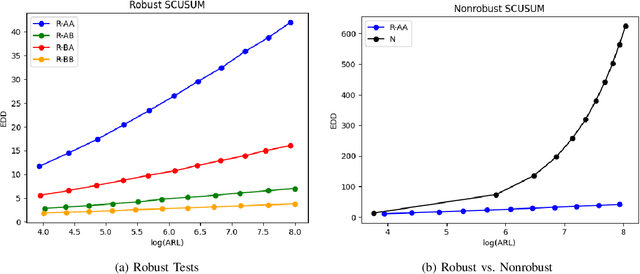
Methods in the field of quickest change detection rapidly detect in real-time a change in the data-generating distribution of an online data stream. Existing methods have been able to detect this change point when the densities of the pre- and post-change distributions are known. Recent work has extended these results to the case where the pre- and post-change distributions are known only by their score functions. This work considers the case where the pre- and post-change score functions are known only to correspond to distributions in two disjoint sets. This work employs a pair of "least-favorable" distributions to robustify the existing score-based quickest change detection algorithm, the properties of which are studied. This paper calculates the least-favorable distributions for specific model classes and provides methods of estimating the least-favorable distributions for common constructions. Simulation results are provided demonstrating the performance of our robust change detection algorithm.
Large Deviation Analysis of Score-based Hypothesis Testing
Feb 03, 2024Score-based statistical models play an important role in modern machine learning, statistics, and signal processing. For hypothesis testing, a score-based hypothesis test is proposed in \cite{wu2022score}. We analyze the performance of this score-based hypothesis testing procedure and derive upper bounds on the probabilities of its Type I and II errors. We prove that the exponents of our error bounds are asymptotically (in the number of samples) tight for the case of simple null and alternative hypotheses. We calculate these error exponents explicitly in specific cases and provide numerical studies for various other scenarios of interest.
Robust Quickest Change Detection in Non-Stationary Processes
Oct 14, 2023Optimal algorithms are developed for robust detection of changes in non-stationary processes. These are processes in which the distribution of the data after change varies with time. The decision-maker does not have access to precise information on the post-change distribution. It is shown that if the post-change non-stationary family has a distribution that is least favorable in a well-defined sense, then the algorithms designed using the least favorable distributions are robust and optimal. Non-stationary processes are encountered in public health monitoring and space and military applications. The robust algorithms are applied to real and simulated data to show their effectiveness.