 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobustNeRF: Ignoring Distractors with Robust Losses
Feb 02, 2023Neural radiance fields (NeRF) excel at synthesizing new views given multi-view, calibrated images of a static scene. When scenes include distractors, which are not persistent during image capture (moving objects, lighting variations, shadows), artifacts appear as view-dependent effects or 'floaters'. To cope with distractors, we advocate a form of robust estimation for NeRF training, modeling distractors in training data as outliers of an optimization problem. Our method successfully removes outliers from a scene and improves upon our baselines, on synthetic and real-world scenes. Our technique is simple to incorporate in modern NeRF frameworks, with few hyper-parameters. It does not assume a priori knowledge of the types of distractors, and is instead focused on the optimization problem rather than pre-processing or modeling transient objects. More results on our page https://robustnerf.github.io/public.
Kubric: A scalable dataset generator
Mar 07, 2022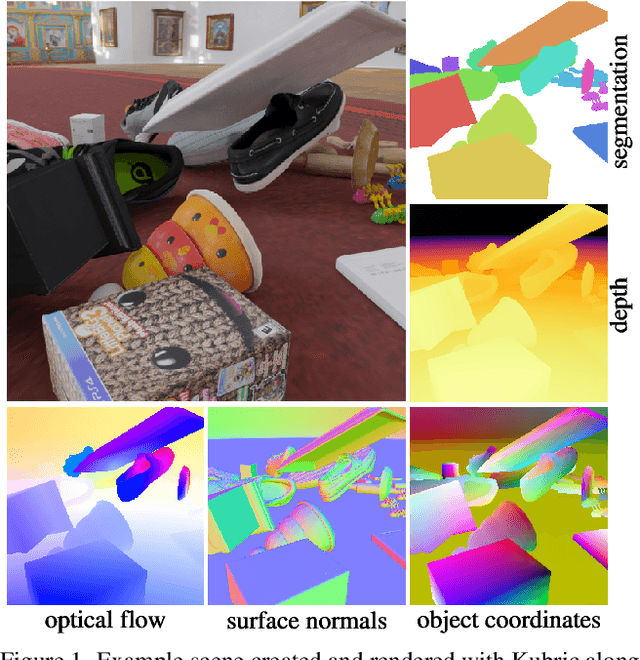
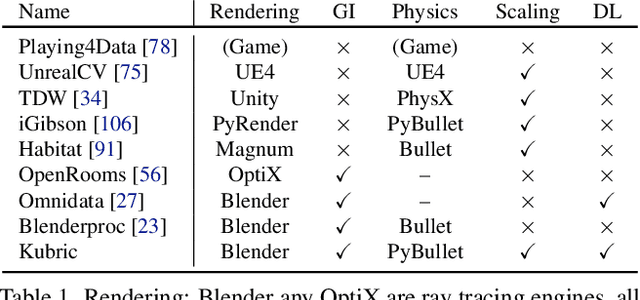
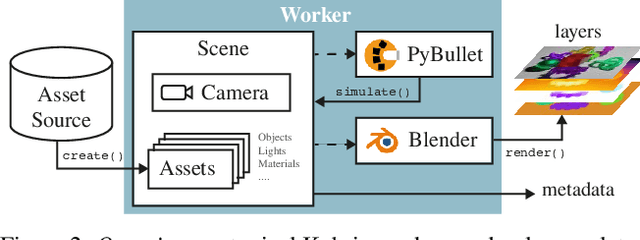
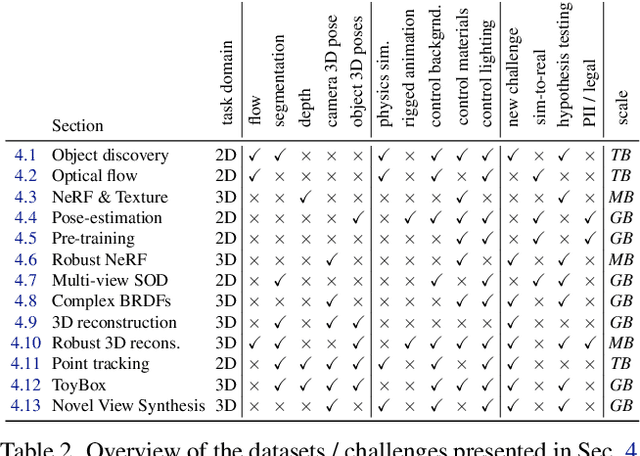
Data is the driving force of machine learning, with the amount and quality of training data often being more important for the performance of a system than architecture and training details. But collecting, processing and annotating real data at scale is difficult, expensive, and frequently raises additional privacy, fairness and legal concerns. Synthetic data is a powerful tool with the potential to address these shortcomings: 1) it is cheap 2) supports rich ground-truth annotations 3) offers full control over data and 4) can circumvent or mitigate problems regarding bias, privacy and licensing. Unfortunately, software tools for effective data generation are less mature than those for architecture design and training, which leads to fragmented generation efforts. To address these problems we introduce Kubric, an open-source Python framework that interfaces with PyBullet and Blender to generate photo-realistic scenes, with rich annotations, and seamlessly scales to large jobs distributed over thousands of machines, and generating TBs of data. We demonstrate the effectiveness of Kubric by presenting a series of 13 different generated datasets for tasks ranging from studying 3D NeRF models to optical flow estimation. We release Kubric, the used assets, all of the generation code, as well as the rendered datasets for reuse and modification.
NeSF: Neural Semantic Fields for Generalizable Semantic Segmentation of 3D Scenes
Dec 03, 2021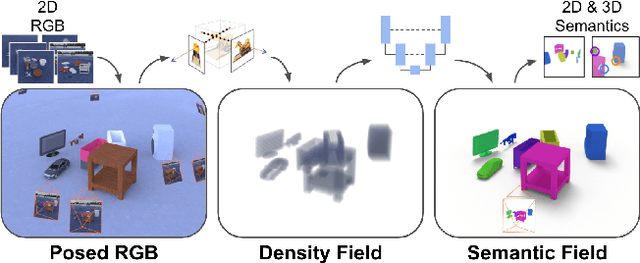
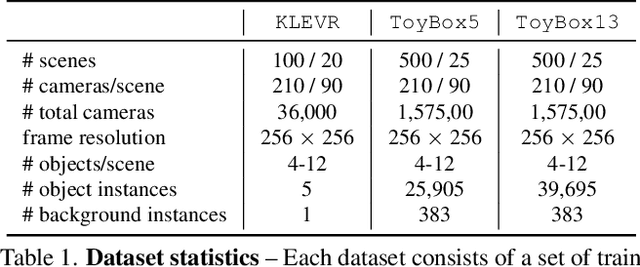

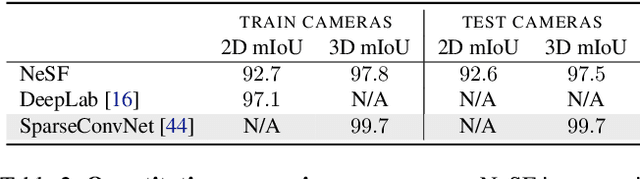
We present NeSF, a method for producing 3D semantic fields from posed RGB images alone. In place of classical 3D representations, our method builds on recent work in implicit neural scene representations wherein 3D structure is captured by point-wise functions. We leverage this methodology to recover 3D density fields upon which we then train a 3D semantic segmentation model supervised by posed 2D semantic maps. Despite being trained on 2D signals alone, our method is able to generate 3D-consistent semantic maps from novel camera poses and can be queried at arbitrary 3D points. Notably, NeSF is compatible with any method producing a density field, and its accuracy improves as the quality of the density field improves. Our empirical analysis demonstrates comparable quality to competitive 2D and 3D semantic segmentation baselines on complex, realistically rendered synthetic scenes. Our method is the first to offer truly dense 3D scene segmentations requiring only 2D supervision for training, and does not require any semantic input for inference on novel scenes. We encourage the readers to visit the project website.
Scene Representation Transformer: Geometry-Free Novel View Synthesis Through Set-Latent Scene Representations
Nov 29, 2021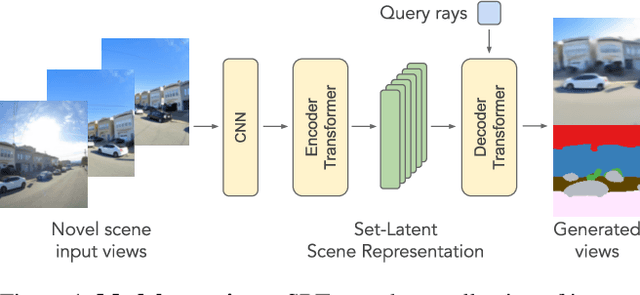
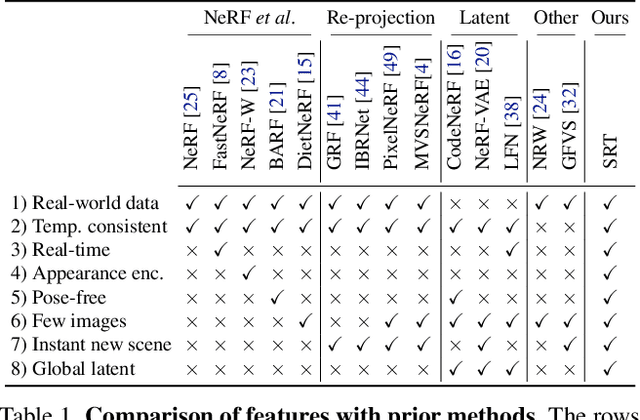
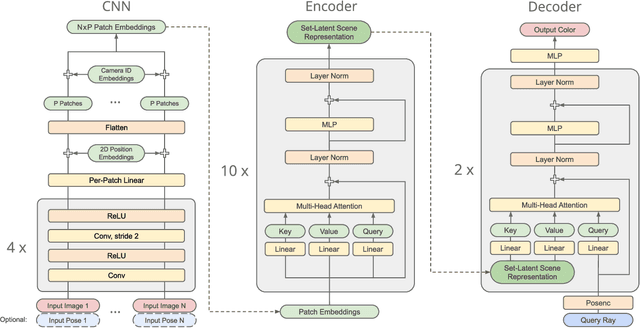
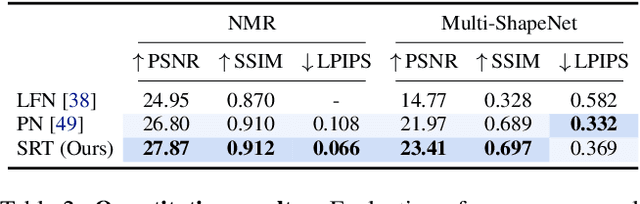
A classical problem in computer vision is to infer a 3D scene representation from few images that can be used to render novel views at interactive rates. Previous work focuses on reconstructing pre-defined 3D representations, e.g. textured meshes, or implicit representations, e.g. radiance fields, and often requires input images with precise camera poses and long processing times for each novel scene. In this work, we propose the Scene Representation Transformer (SRT), a method which processes posed or unposed RGB images of a new area, infers a "set-latent scene representation", and synthesises novel views, all in a single feed-forward pass. To calculate the scene representation, we propose a generalization of the Vision Transformer to sets of images, enabling global information integration, and hence 3D reasoning. An efficient decoder transformer parameterizes the light field by attending into the scene representation to render novel views. Learning is supervised end-to-end by minimizing a novel-view reconstruction error. We show that this method outperforms recent baselines in terms of PSNR and speed on synthetic datasets, including a new dataset created for the paper. Further, we demonstrate that SRT scales to support interactive visualization and semantic segmentation of real-world outdoor environments using Street View imagery.
Future Segmentation Using 3D Structure
Nov 28, 2018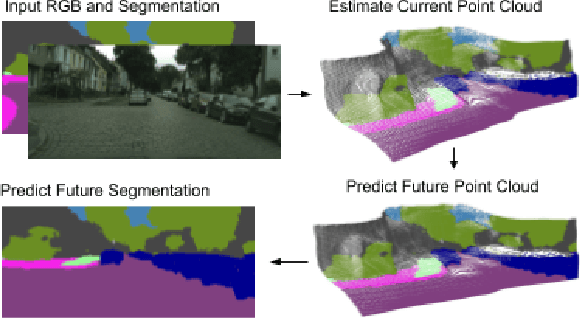
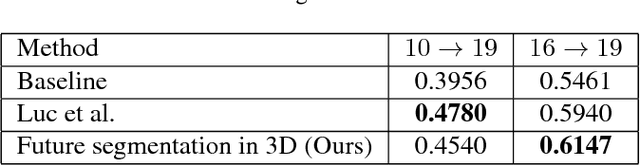
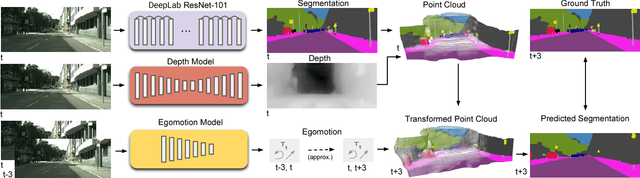

Predicting the future to anticipate the outcome of events and actions is a critical attribute of autonomous agents; particularly for agents which must rely heavily on real time visual data for decision making. Working towards this capability, we address the task of predicting future frame segmentation from a stream of monocular video by leveraging the 3D structure of the scene. Our framework is based on learnable sub-modules capable of predicting pixel-wise scene semantic labels, depth, and camera ego-motion of adjacent frames. We further propose a recurrent neural network based model capable of predicting future ego-motion trajectory as a function of a series of past ego-motion steps. Ultimately, we observe that leveraging 3D structure in the model facilitates successful prediction, achieving state of the art accuracy in future semantic segmentation.