 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Adaptation for Myographic Control of Natural Dexterous Hand and Finger Movements
Dec 23, 2024One of the most elusive goals in myographic prosthesis control is the ability to reliably decode continuous positions simultaneously across multiple degrees-of-freedom. Goal: To demonstrate dexterous, natural, biomimetic finger and wrist control of the highly advanced robotic Modular Prosthetic Limb. Methods: We combine sequential temporal regression models and reinforcement learning using myographic signals to predict continuous simultaneous predictions of 7 finger and wrist degrees-of-freedom for 9 non-amputee human subjects in a minimally-constrained freeform training process. Results: We demonstrate highly dexterous 7 DoF position-based regression for prosthesis control from EMG signals, with significantly lower error rates than traditional approaches (p < 0.001) and nearly zero prediction response time delay (p < 0.001). Their performance can be continuously improved at any time using our freeform reinforcement process. Significance: We have demonstrated the most dexterous, biomimetic, and natural prosthesis control performance ever obtained from the surface EMG signal. Our reinforcement approach allowed us to abandon standard training protocols and simply allow the subject to move in any desired way while our models adapt. Conclusions: This work redefines the state-of-the-art in myographic decoding in terms of the reliability, responsiveness, and movement complexity available from prosthesis control systems. The present-day emergence and convergence of advanced algorithmic methods, experiment protocols, dexterous robotic prostheses, and sensor modalities represents a unique opportunity to finally realize our ultimate goal of achieving fully restorative natural upper-limb function for amputees.
Clinical Risk Prediction Using Language Models: Benefits And Considerations
Nov 29, 2023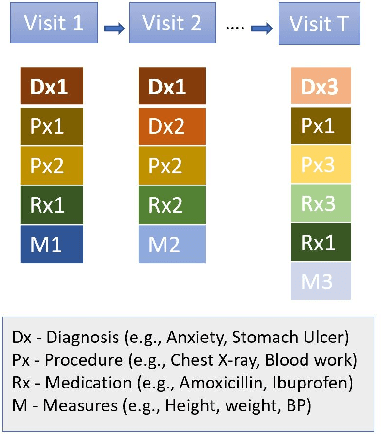
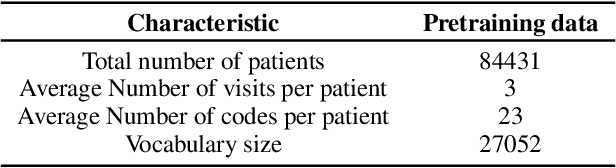
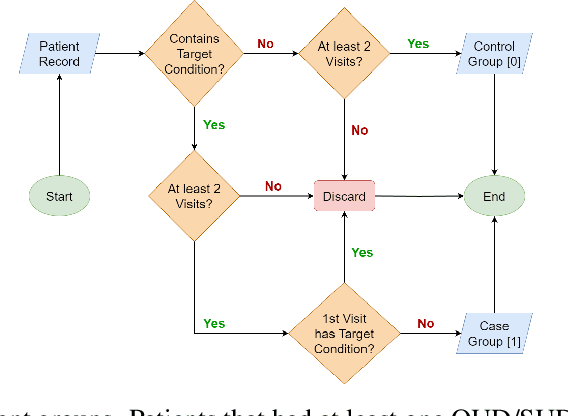
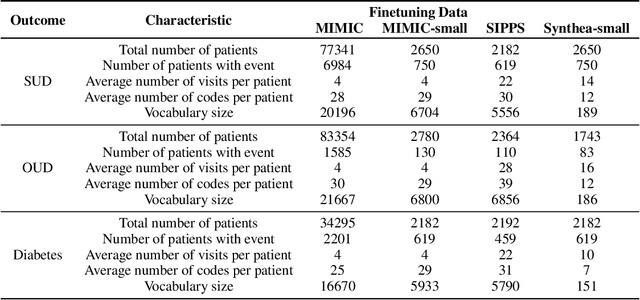
The utilization of Electronic Health Records (EHRs) for clinical risk prediction is on the rise. However, strict privacy regulations limit access to comprehensive health records, making it challenging to apply standard machine learning algorithms in practical real-world scenarios. Previous research has addressed this data limitation by incorporating medical ontologies and employing transfer learning methods. In this study, we investigate the potential of leveraging language models (LMs) as a means to incorporate supplementary domain knowledge for improving the performance of various EHR-based risk prediction tasks. Unlike applying LMs to unstructured EHR data such as clinical notes, this study focuses on using textual descriptions within structured EHR to make predictions exclusively based on that information. We extensively compare against previous approaches across various data types and sizes. We find that employing LMs to represent structured EHRs, such as diagnostic histories, leads to improved or at least comparable performance in diverse risk prediction tasks. Furthermore, LM-based approaches offer numerous advantages, including few-shot learning, the capability to handle previously unseen medical concepts, and adaptability to various medical vocabularies. Nevertheless, we underscore, through various experiments, the importance of being cautious when employing such models, as concerns regarding the reliability of LMs persist.
A Sonomyography-based Muscle Computer Interface for Individuals with Spinal Cord Injury
Aug 02, 2023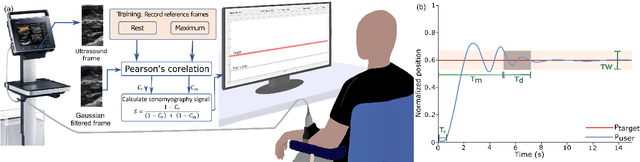
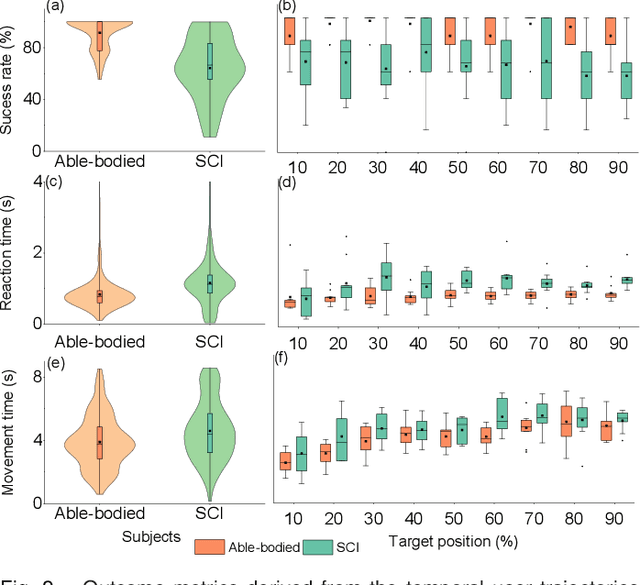
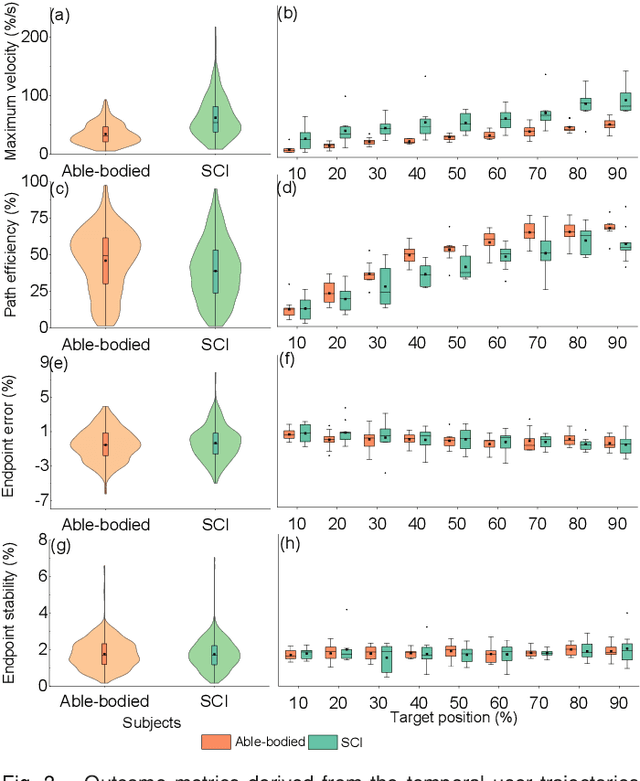
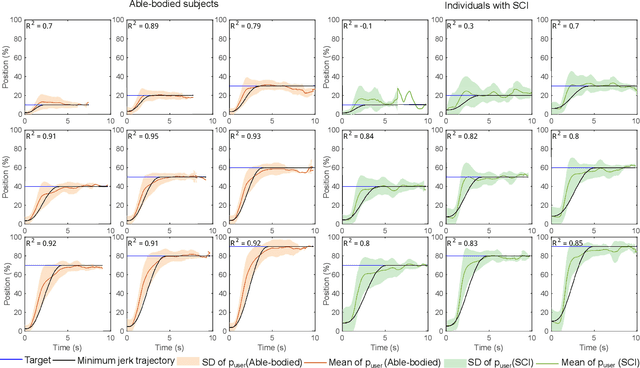
Impairment of hand functions in individuals with spinal cord injury (SCI) severely disrupts activities of daily living. Recent advances have enabled rehabilitation assisted by robotic devices to augment the residual function of the muscles. Traditionally, non-invasive electromyography-based peripheral neural interfaces have been utilized to sense volitional motor intent to drive robotic assistive devices. However, the dexterity and fidelity of control that can be achieved with electromyography-based control have been limited due to inherent limitations in signal quality. We have developed and tested a muscle-computer interface (MCI) utilizing sonomyography to provide control of a virtual cursor for individuals with motor-incomplete spinal cord injury. We demonstrate that individuals with SCI successfully gained control of a virtual cursor by utilizing contractions of muscles of the wrist joint. The sonomyography-based interface enabled control of the cursor at multiple graded levels demonstrating the ability to achieve accurate and stable endpoint control. Our sonomyography-based muscle-computer interface can enable dexterous control of upper-extremity assistive devices for individuals with motor-incomplete SCI.
GenSyn: A Multi-stage Framework for Generating Synthetic Microdata using Macro Data Sources
Dec 08, 2022



Individual-level data (microdata) that characterizes a population, is essential for studying many real-world problems. However, acquiring such data is not straightforward due to cost and privacy constraints, and access is often limited to aggregated data (macro data) sources. In this study, we examine synthetic data generation as a tool to extrapolate difficult-to-obtain high-resolution data by combining information from multiple easier-to-obtain lower-resolution data sources. In particular, we introduce a framework that uses a combination of univariate and multivariate frequency tables from a given target geographical location in combination with frequency tables from other auxiliary locations to generate synthetic microdata for individuals in the target location. Our method combines the estimation of a dependency graph and conditional probabilities from the target location with the use of a Gaussian copula to leverage the available information from the auxiliary locations. We perform extensive testing on two real-world datasets and demonstrate that our approach outperforms prior approaches in preserving the overall dependency structure of the data while also satisfying the constraints defined on the different variables.
Limited View and Sparse Photoacoustic Tomography for Neuroimaging with Deep Learning
Nov 11, 2019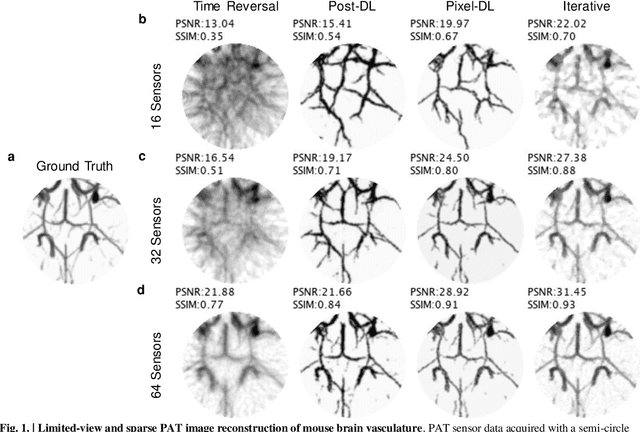
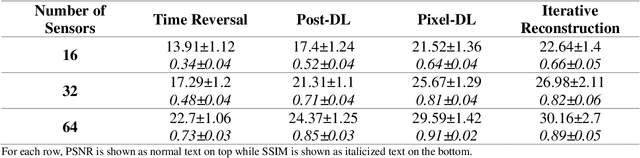
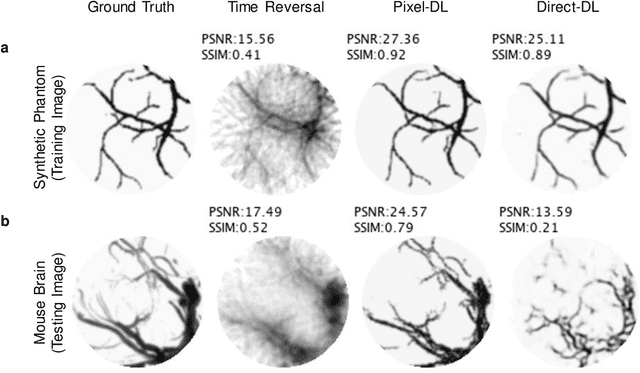
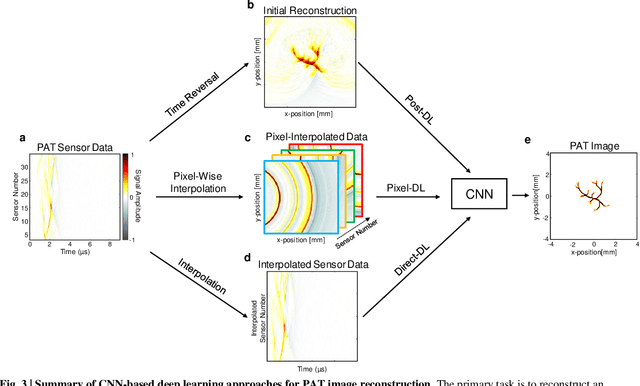
Photoacoustic tomography (PAT) is a nonionizing imaging modality capable of acquiring high contrast and resolution images of optical absorption at depths greater than traditional optical imaging techniques. Practical considerations with instrumentation and geometry limit the number of available acoustic sensors and their view of the imaging target, which result in significant image reconstruction artifacts degrading image quality. Iterative reconstruction methods can be used to reduce artifacts but are computationally expensive. In this work, we propose a novel deep learning approach termed pixelwise deep learning (PixelDL) that first employs pixelwise interpolation governed by the physics of photoacoustic wave propagation and then uses a convolution neural network to directly reconstruct an image. Simulated photoacoustic data from synthetic vasculature phantom and mouse-brain vasculature were used for training and testing, respectively. Results demonstrated that PixelDL achieved comparable performance to iterative methods and outperformed other CNN-based approaches for correcting artifacts. PixelDL is a computationally efficient approach that enables for realtime PAT rendering and for improved image quality, quantification, and interpretation.
Fully Dense UNet for 2D Sparse Photoacoustic Tomography Artifact Removal
Sep 10, 2018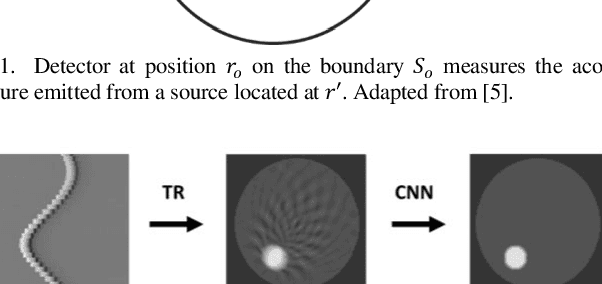
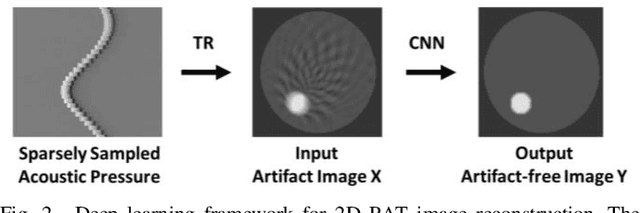
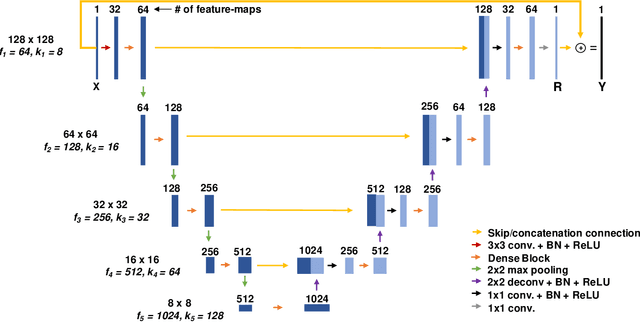
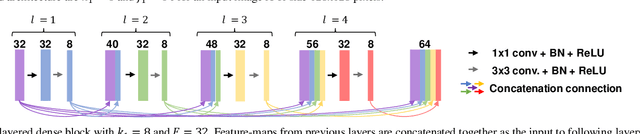
Photoacoustic imaging is an emerging imaging modality that is based upon the photoacoustic effect. In photoacoustic tomography (PAT), the induced acoustic pressure waves are measured by an array of detectors and used to reconstruct an image of the initial pressure distribution. A common challenge faced in PAT is that the measured acoustic waves can only be sparsely sampled. Reconstructing sparsely sampled data using standard methods results in severe artifacts that obscure information within the image. We propose a novel convolutional neural network (CNN) architecture termed Fully Dense UNet (FD-UNet) for removing artifacts from 2D PAT images reconstructed from sparse data and compare the proposed CNN with the standard UNet in terms of reconstructed image quality.
Sparsity Analysis of a Sonomyographic Muscle-Computer Interface
Sep 06, 2018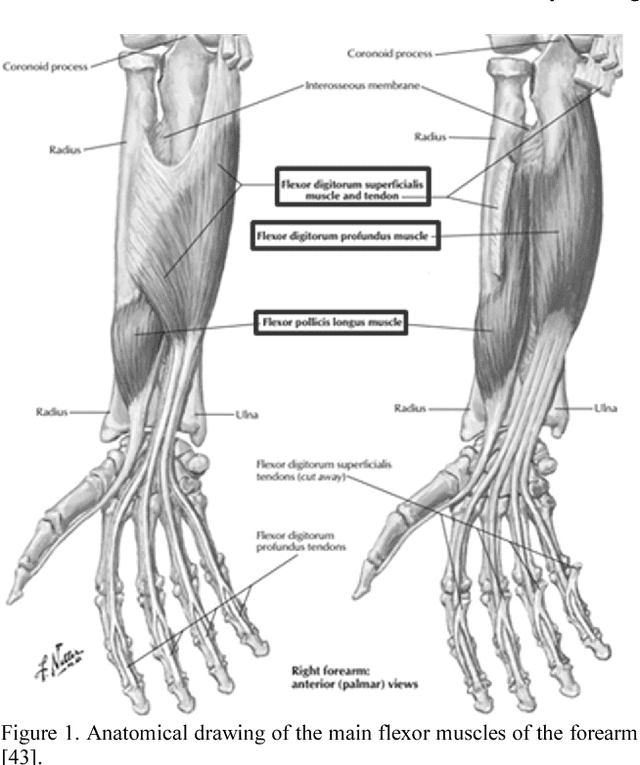
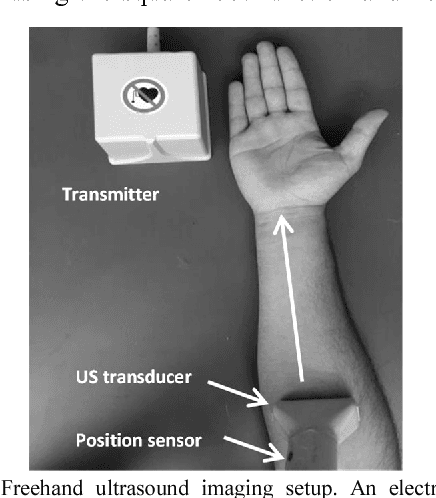
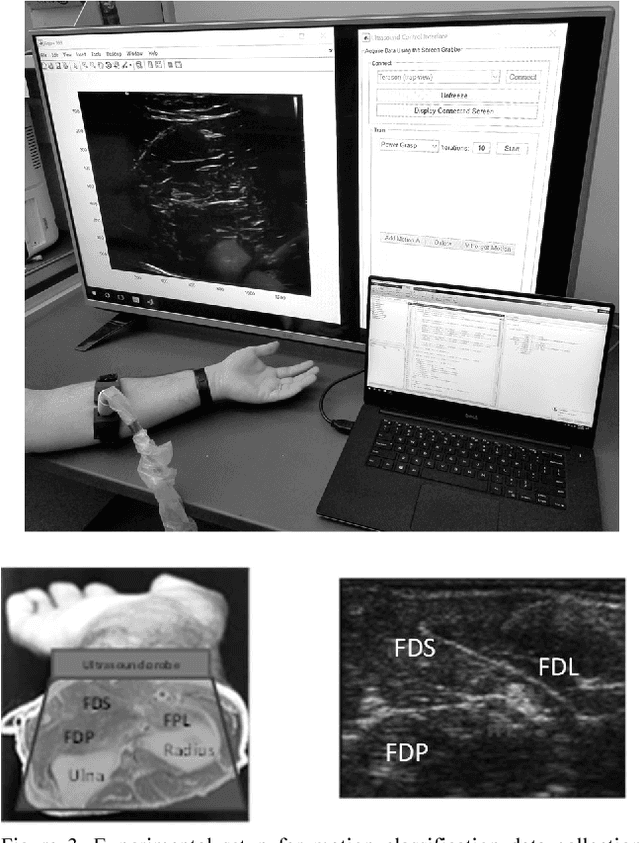
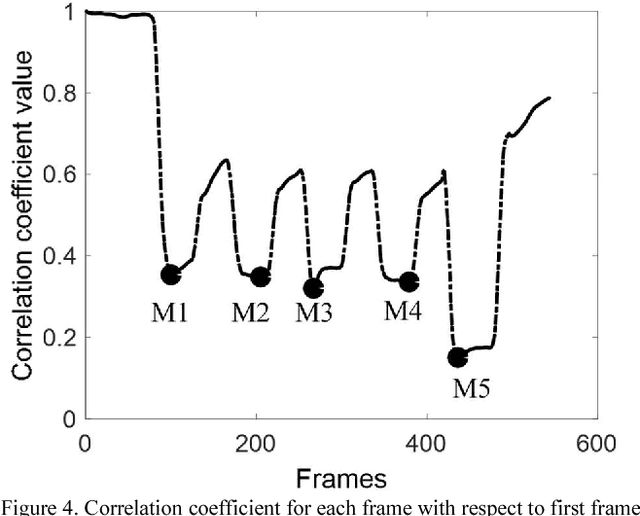
Objective: The objectives of this paper are to determine the optimal location for ultrasound transducer placement on the anterior forearm for imaging maximum muscle deformations during different hand motions and to investigate the effect of using a sparse set of ultrasound scanlines for motion classification for ultrasound-based muscle computer interfaces (MCIs). Methods: The optimal placement of the ultrasound transducer along the forearm is identified using freehand 3D reconstructions of the muscle thickness during rest and motion completion. From the ultrasound images acquired from the optimally placed transducer, we determine classification accuracy with equally spaced scanlines across the cross-sectional field-of-view (FOV). Furthermore, we investigated the unique contribution of each scanline to class discrimination using Fisher criteria (FC) and mutual information (MI) with respect to motion discriminability. Results: Experiments with 5 able-bodied subjects show that the maximum muscle deformation occurred between 30-50% of the forearm length for multiple degrees-of-freedom. The average classification accuracy was 94.6% with the entire 128 scanline image and 94.5% with 4 equally-spaced scanlines. However, no significant improvement in classification accuracy was observed with optimal scanline selection using FC and MI. Conclusion: For an optimally placed transducer, a small subset of ultrasound scanlines can be used instead of a full imaging array without sacrificing performance in terms of classification accuracy for multiple degrees-of-freedom. Significance: The selection of a small subset of transducer elements can enable the reduction of computation, and simplification of the instrumentation and power consumption of wearable sonomyographic MCIs particularly for rehabilitation and gesture recognition applications.
Proprioceptive Sonomyographic Control: A novel method of intuitive proportional control of multiple degrees of freedom for upper-extremity amputees
Aug 20, 2018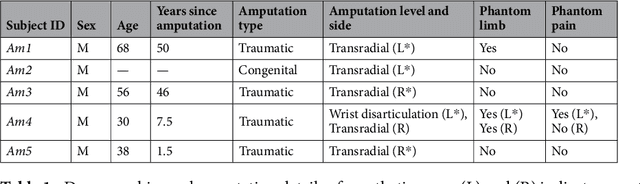
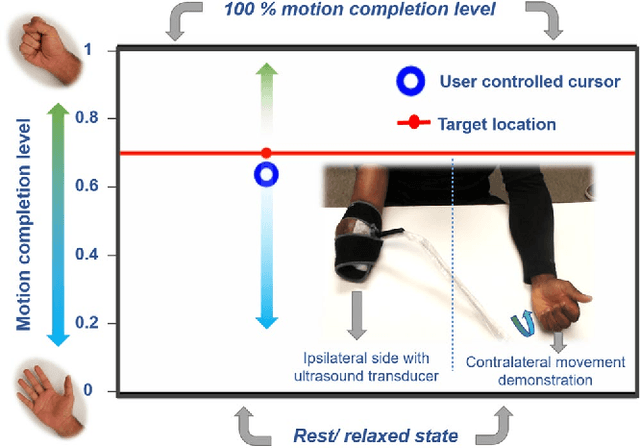
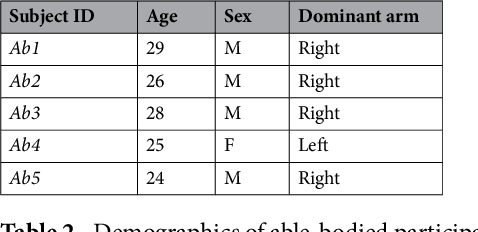
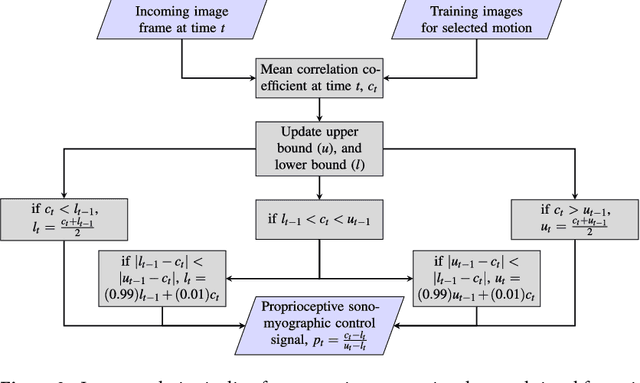
Technological advances in multi-articulated prosthetic hands have outpaced the methods available to amputees to intuitively control these devices. Amputees often cite difficulty of use as a key contributing factor for abandoning their prosthesis, creating a pressing need for improved control technology. A major challenge of traditional myoelectric control strategies using surface electromyography electrodes has been the difficulty in achieving intuitive and robust proportional control of multiple degrees of freedom. In this paper, we describe a new control method, proprioceptive sonomyographic control that overcomes several limitations of myoelectric control. In sonomyography, muscle mechanical deformation is sensed using ultrasound, as compared to electrical activation, and therefore the resulting control signals can directly control the position of the end effector. Compared to myoelectric control which controls the velocity of the end-effector device, sonomyographic control is more congruent with residual proprioception in the residual limb. We tested our approach with 5 upper-extremity amputees and able-bodied subjects using a virtual target achievement and holding task. Amputees and able-bodied participants demonstrated the ability to achieve positional control for 5 degrees of freedom with an hour of training. Our results demonstrate the potential of proprioceptive sonomyographic control for intuitive dexterous control of multiarticulated prostheses.