 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Adaptation for Myographic Control of Natural Dexterous Hand and Finger Movements
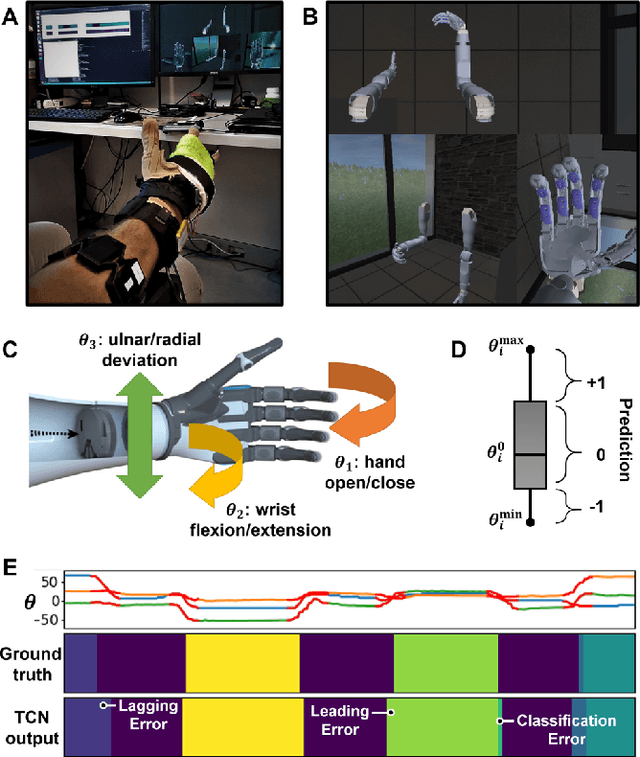
Dec 23, 2024One of the most elusive goals in myographic prosthesis control is the ability to reliably decode continuous positions simultaneously across multiple degrees-of-freedom. Goal: To demonstrate dexterous, natural, biomimetic finger and wrist control of the highly advanced robotic Modular Prosthetic Limb. Methods: We combine sequential temporal regression models and reinforcement learning using myographic signals to predict continuous simultaneous predictions of 7 finger and wrist degrees-of-freedom for 9 non-amputee human subjects in a minimally-constrained freeform training process. Results: We demonstrate highly dexterous 7 DoF position-based regression for prosthesis control from EMG signals, with significantly lower error rates than traditional approaches (p < 0.001) and nearly zero prediction response time delay (p < 0.001). Their performance can be continuously improved at any time using our freeform reinforcement process. Significance: We have demonstrated the most dexterous, biomimetic, and natural prosthesis control performance ever obtained from the surface EMG signal. Our reinforcement approach allowed us to abandon standard training protocols and simply allow the subject to move in any desired way while our models adapt. Conclusions: This work redefines the state-of-the-art in myographic decoding in terms of the reliability, responsiveness, and movement complexity available from prosthesis control systems. The present-day emergence and convergence of advanced algorithmic methods, experiment protocols, dexterous robotic prostheses, and sensor modalities represents a unique opportunity to finally realize our ultimate goal of achieving fully restorative natural upper-limb function for amputees.
Stable Electromyographic Sequence Prediction During Movement Transitions using Temporal Convolutional Networks
Jan 08, 2019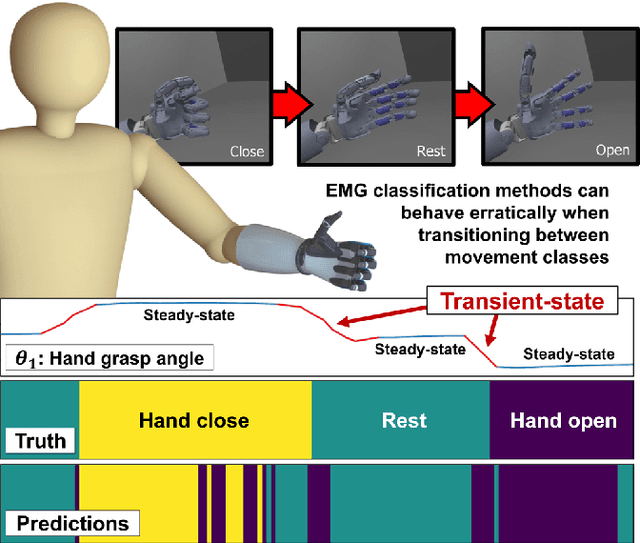
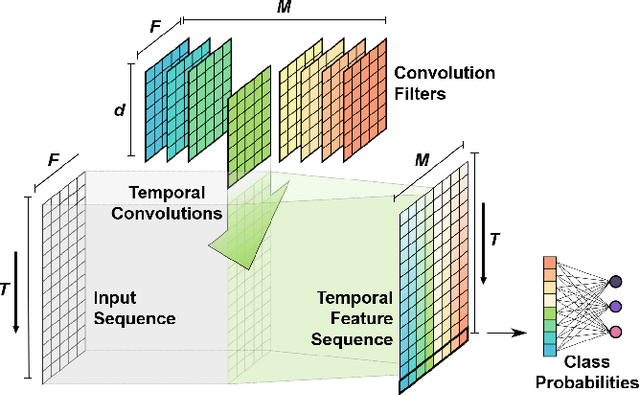
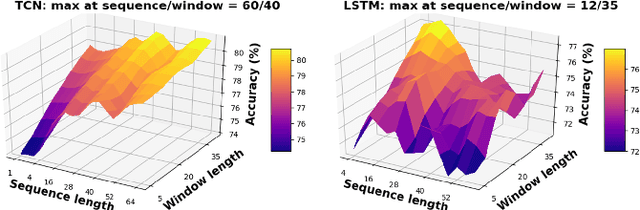
Transient muscle movements influence the temporal structure of myoelectric signal patterns, often leading to unstable prediction behavior from movement-pattern classification methods. We show that temporal convolutional network sequential models leverage the myoelectric signal's history to discover contextual temporal features that aid in correctly predicting movement intentions, especially during interclass transitions. We demonstrate myoelectric classification using temporal convolutional networks to effect 3 simultaneous hand and wrist degrees-of-freedom in an experiment involving nine human-subjects. Temporal convolutional networks yield significant $(p<0.001)$ performance improvements over other state-of-the-art methods in terms of both classification accuracy and stability.