 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Adaptation for Myographic Control of Natural Dexterous Hand and Finger Movements
Dec 23, 2024One of the most elusive goals in myographic prosthesis control is the ability to reliably decode continuous positions simultaneously across multiple degrees-of-freedom. Goal: To demonstrate dexterous, natural, biomimetic finger and wrist control of the highly advanced robotic Modular Prosthetic Limb. Methods: We combine sequential temporal regression models and reinforcement learning using myographic signals to predict continuous simultaneous predictions of 7 finger and wrist degrees-of-freedom for 9 non-amputee human subjects in a minimally-constrained freeform training process. Results: We demonstrate highly dexterous 7 DoF position-based regression for prosthesis control from EMG signals, with significantly lower error rates than traditional approaches (p < 0.001) and nearly zero prediction response time delay (p < 0.001). Their performance can be continuously improved at any time using our freeform reinforcement process. Significance: We have demonstrated the most dexterous, biomimetic, and natural prosthesis control performance ever obtained from the surface EMG signal. Our reinforcement approach allowed us to abandon standard training protocols and simply allow the subject to move in any desired way while our models adapt. Conclusions: This work redefines the state-of-the-art in myographic decoding in terms of the reliability, responsiveness, and movement complexity available from prosthesis control systems. The present-day emergence and convergence of advanced algorithmic methods, experiment protocols, dexterous robotic prostheses, and sensor modalities represents a unique opportunity to finally realize our ultimate goal of achieving fully restorative natural upper-limb function for amputees.
Sparsity Analysis of a Sonomyographic Muscle-Computer Interface
Sep 06, 2018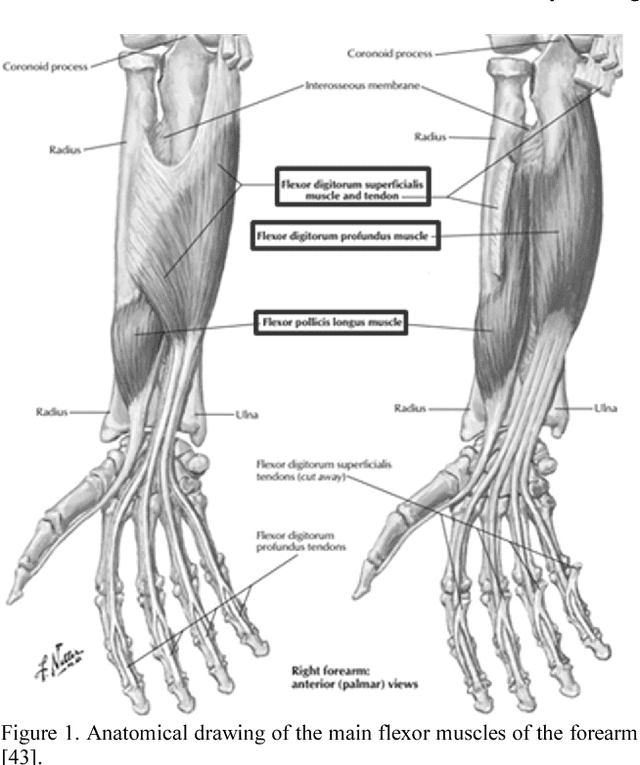
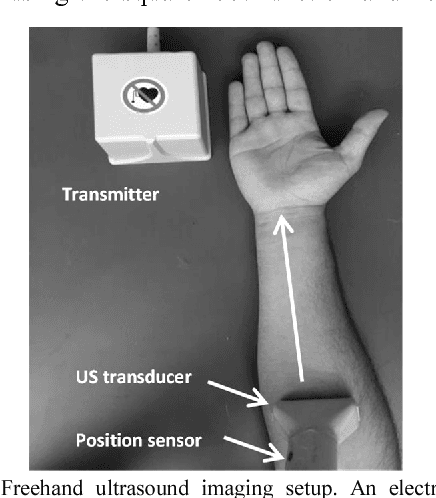
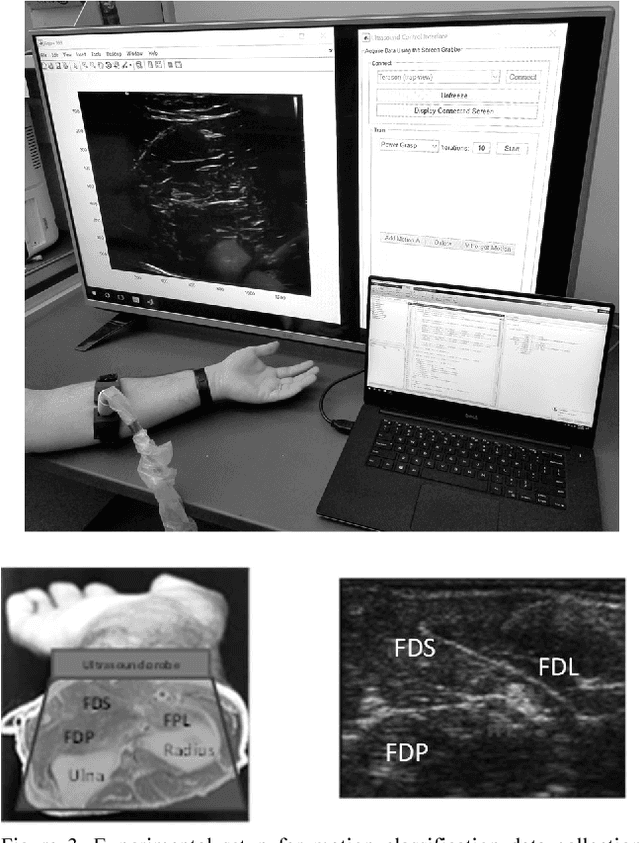
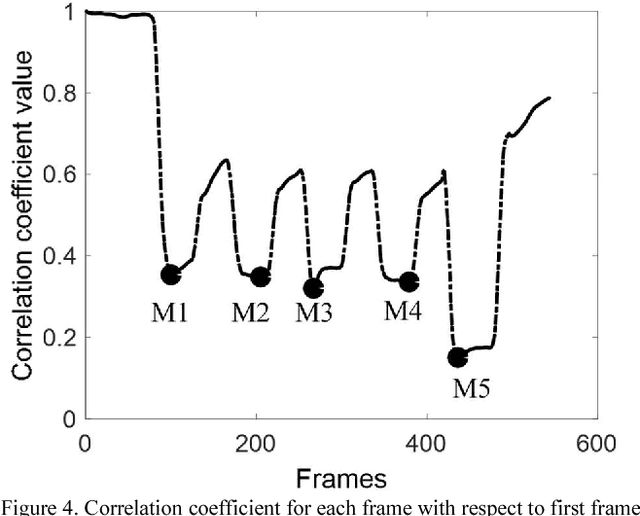
Objective: The objectives of this paper are to determine the optimal location for ultrasound transducer placement on the anterior forearm for imaging maximum muscle deformations during different hand motions and to investigate the effect of using a sparse set of ultrasound scanlines for motion classification for ultrasound-based muscle computer interfaces (MCIs). Methods: The optimal placement of the ultrasound transducer along the forearm is identified using freehand 3D reconstructions of the muscle thickness during rest and motion completion. From the ultrasound images acquired from the optimally placed transducer, we determine classification accuracy with equally spaced scanlines across the cross-sectional field-of-view (FOV). Furthermore, we investigated the unique contribution of each scanline to class discrimination using Fisher criteria (FC) and mutual information (MI) with respect to motion discriminability. Results: Experiments with 5 able-bodied subjects show that the maximum muscle deformation occurred between 30-50% of the forearm length for multiple degrees-of-freedom. The average classification accuracy was 94.6% with the entire 128 scanline image and 94.5% with 4 equally-spaced scanlines. However, no significant improvement in classification accuracy was observed with optimal scanline selection using FC and MI. Conclusion: For an optimally placed transducer, a small subset of ultrasound scanlines can be used instead of a full imaging array without sacrificing performance in terms of classification accuracy for multiple degrees-of-freedom. Significance: The selection of a small subset of transducer elements can enable the reduction of computation, and simplification of the instrumentation and power consumption of wearable sonomyographic MCIs particularly for rehabilitation and gesture recognition applications.