 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLimited View and Sparse Photoacoustic Tomography for Neuroimaging with Deep Learning
Nov 11, 2019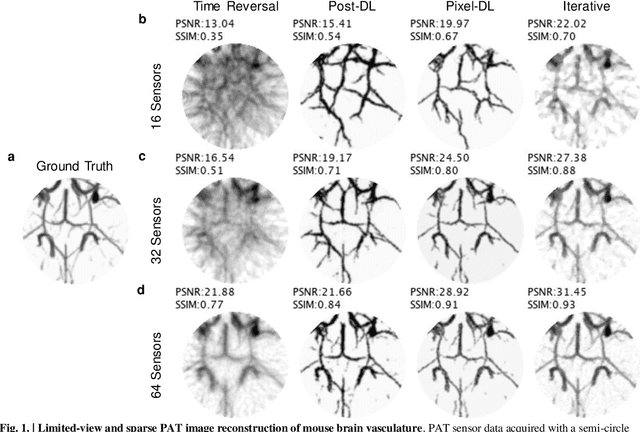
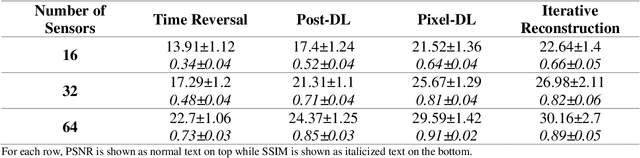
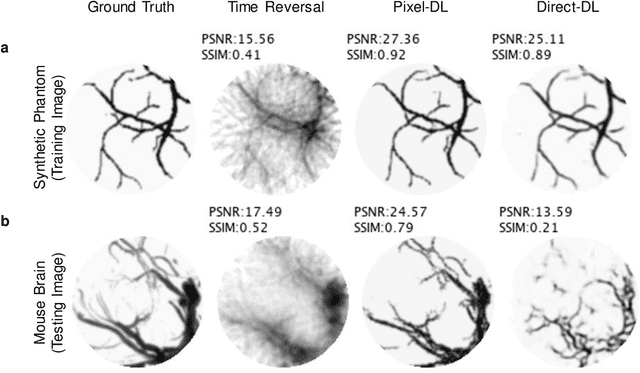
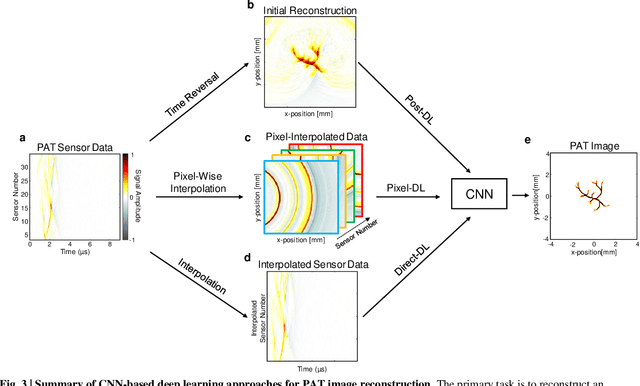
Photoacoustic tomography (PAT) is a nonionizing imaging modality capable of acquiring high contrast and resolution images of optical absorption at depths greater than traditional optical imaging techniques. Practical considerations with instrumentation and geometry limit the number of available acoustic sensors and their view of the imaging target, which result in significant image reconstruction artifacts degrading image quality. Iterative reconstruction methods can be used to reduce artifacts but are computationally expensive. In this work, we propose a novel deep learning approach termed pixelwise deep learning (PixelDL) that first employs pixelwise interpolation governed by the physics of photoacoustic wave propagation and then uses a convolution neural network to directly reconstruct an image. Simulated photoacoustic data from synthetic vasculature phantom and mouse-brain vasculature were used for training and testing, respectively. Results demonstrated that PixelDL achieved comparable performance to iterative methods and outperformed other CNN-based approaches for correcting artifacts. PixelDL is a computationally efficient approach that enables for realtime PAT rendering and for improved image quality, quantification, and interpretation.
Sparsity Analysis of a Sonomyographic Muscle-Computer Interface
Sep 06, 2018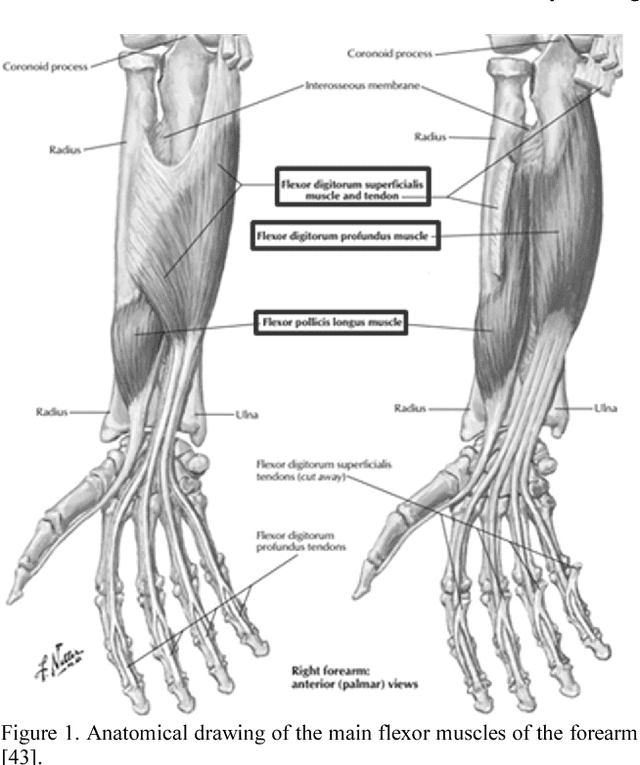
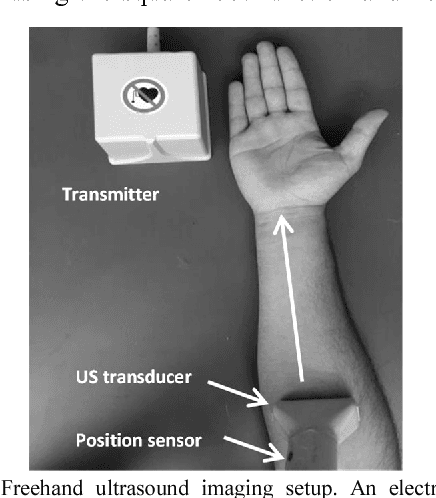
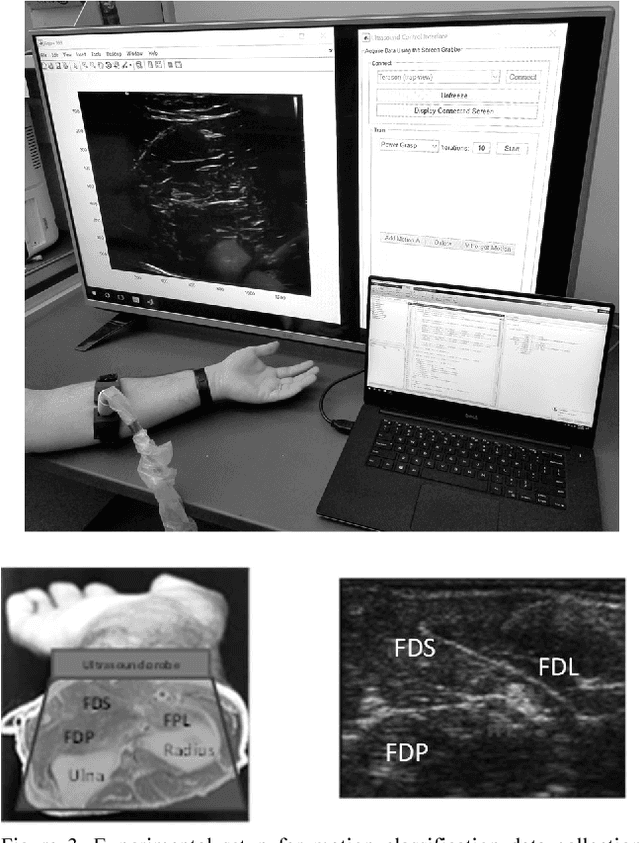
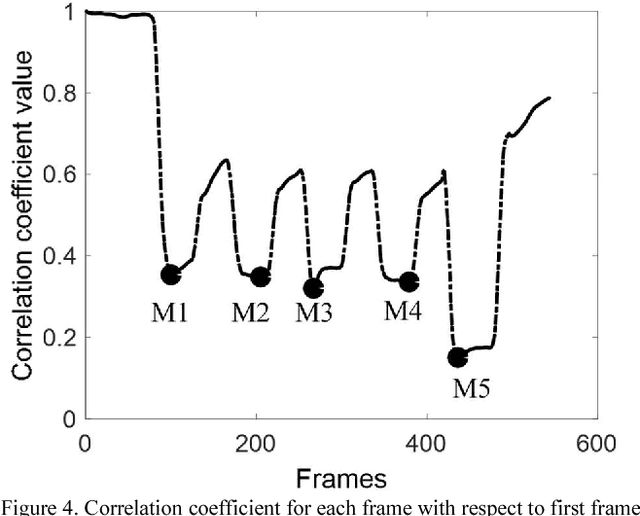
Objective: The objectives of this paper are to determine the optimal location for ultrasound transducer placement on the anterior forearm for imaging maximum muscle deformations during different hand motions and to investigate the effect of using a sparse set of ultrasound scanlines for motion classification for ultrasound-based muscle computer interfaces (MCIs). Methods: The optimal placement of the ultrasound transducer along the forearm is identified using freehand 3D reconstructions of the muscle thickness during rest and motion completion. From the ultrasound images acquired from the optimally placed transducer, we determine classification accuracy with equally spaced scanlines across the cross-sectional field-of-view (FOV). Furthermore, we investigated the unique contribution of each scanline to class discrimination using Fisher criteria (FC) and mutual information (MI) with respect to motion discriminability. Results: Experiments with 5 able-bodied subjects show that the maximum muscle deformation occurred between 30-50% of the forearm length for multiple degrees-of-freedom. The average classification accuracy was 94.6% with the entire 128 scanline image and 94.5% with 4 equally-spaced scanlines. However, no significant improvement in classification accuracy was observed with optimal scanline selection using FC and MI. Conclusion: For an optimally placed transducer, a small subset of ultrasound scanlines can be used instead of a full imaging array without sacrificing performance in terms of classification accuracy for multiple degrees-of-freedom. Significance: The selection of a small subset of transducer elements can enable the reduction of computation, and simplification of the instrumentation and power consumption of wearable sonomyographic MCIs particularly for rehabilitation and gesture recognition applications.
Simplified vision based automatic navigation for wheat harvesting in low income economies
Jan 10, 2015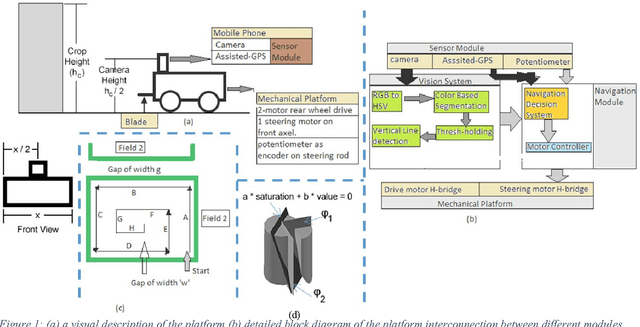
Recent developments in the domain of agricultural robotics have resulted in development of complex and efficient systems. Most of the land owners in the South Asian region are low income farmers. The agricultural experience for them is still a completely manual process. However, the extreme weather conditions, heat and flooding, often combine to put a lot of stress on these small land owners and the associated labor. In this paper, we propose a prototype for an automated power reaper for the wheat crop. This automated vehicle is navigated using a simple vision based approach employing the low-cost camera and assisted GPS. The mechanical platform is driven by three motors controlled through an interface between the proposed vision algorithm and the electrical drive. The proposed methodology is applied on some real field scenarios to demonstrate the efficiency of the vision based algorithm.