 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Farm Vehicles: Prototype of Power Reaper
Jan 10, 2015

Chapter 2 will begin with introduction of Agricultural Robotics. There will be a literature review of the mechanical structure, vision and control algorithms. In chapter 3 we will discuss the methodology in detail using block diagrams and flowcharts. The results of the tested and the proposed algorithms will also be displayed. In chapter 4 we will discuss the results in detail and how they are of significance in our work. In chapter 5 we will conclude our work and discuss some future perspectives. In appendices we will provide some background information necessary regarding this project.
Low Cost Semi-Autonomous Agricultural Robots In Pakistan-Vision Based Navigation Scalable methodology for wheat harvesting
Jan 10, 2015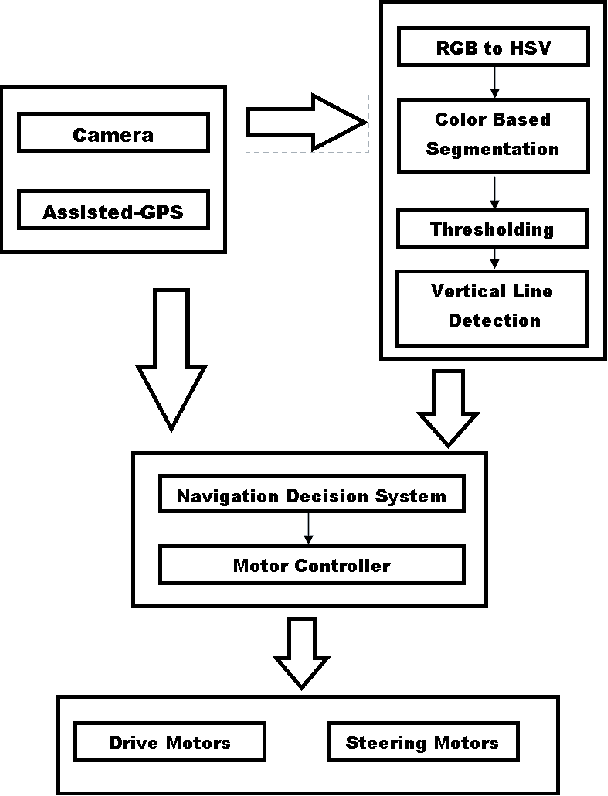


Robots have revolutionized our way of life in recent years.One of the domains that has not yet completely benefited from the robotic automation is the agricultural sector. Agricultural Robotics should complement humans in the arduous tasks during different sub-domains of this sector. Extensive research in Agricultural Robotics has been carried out in Japan, USA, Australia and Germany focusing mainly on the heavy agricultural machinery. Pakistan is an agricultural rich country and its economy and food security are closely tied with agriculture in general and wheat in particular. However, agricultural research in Pakistan is still carried out using the conventional methodologies. This paper is an attempt to trigger the research in this modern domain so that we can benefit from cost effective and resource efficient autonomous agricultural methodologies. This paper focuses on a scalable low cost semi-autonomous technique for wheat harvest which primarily focuses on the farmers with small land holdings. The main focus will be on the vision part of the navigation system deployed by the proposed robot.
Simplified vision based automatic navigation for wheat harvesting in low income economies
Jan 10, 2015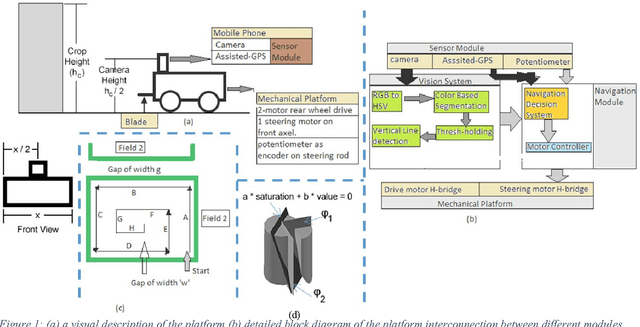
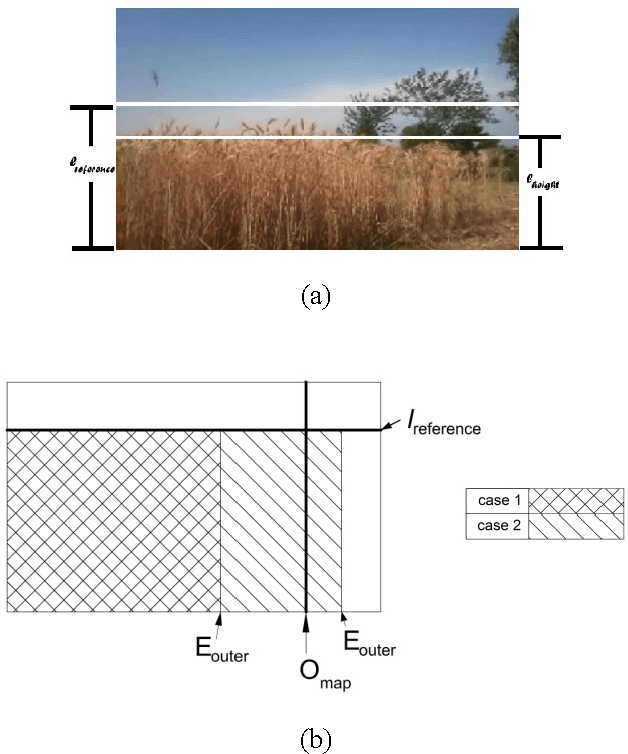
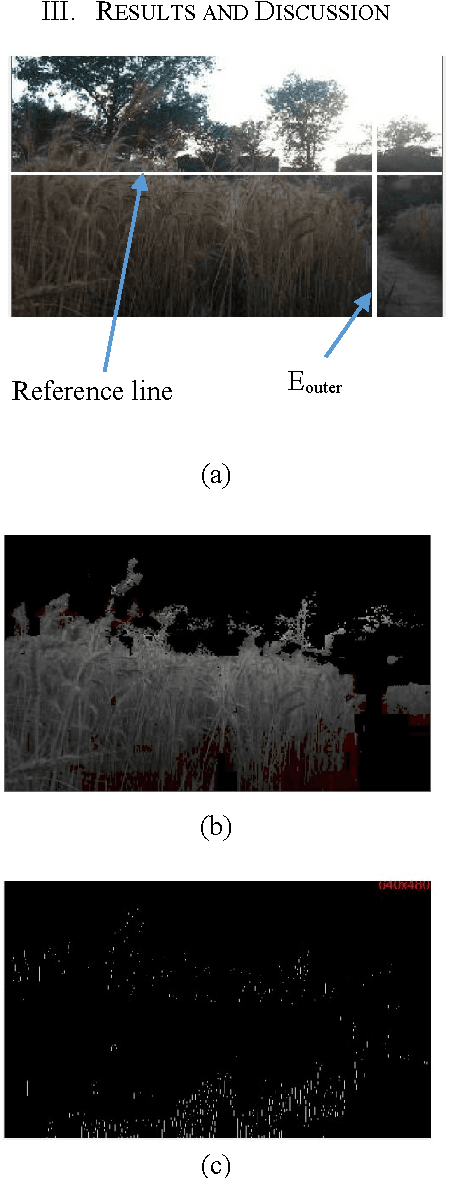
Recent developments in the domain of agricultural robotics have resulted in development of complex and efficient systems. Most of the land owners in the South Asian region are low income farmers. The agricultural experience for them is still a completely manual process. However, the extreme weather conditions, heat and flooding, often combine to put a lot of stress on these small land owners and the associated labor. In this paper, we propose a prototype for an automated power reaper for the wheat crop. This automated vehicle is navigated using a simple vision based approach employing the low-cost camera and assisted GPS. The mechanical platform is driven by three motors controlled through an interface between the proposed vision algorithm and the electrical drive. The proposed methodology is applied on some real field scenarios to demonstrate the efficiency of the vision based algorithm.