 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWavelet subspace decomposition of thermal infrared images for defect detection in artworks
Aug 25, 2015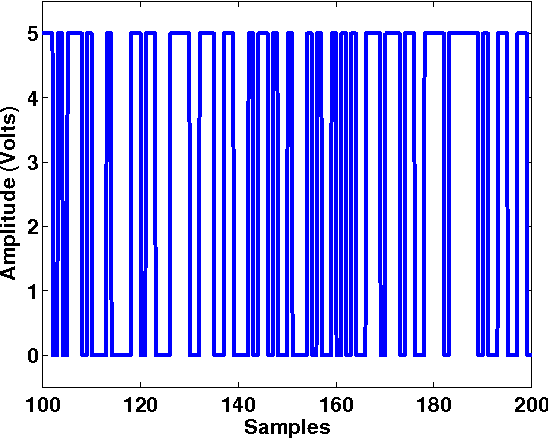
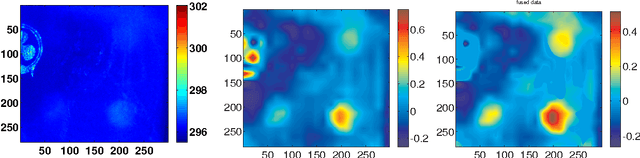

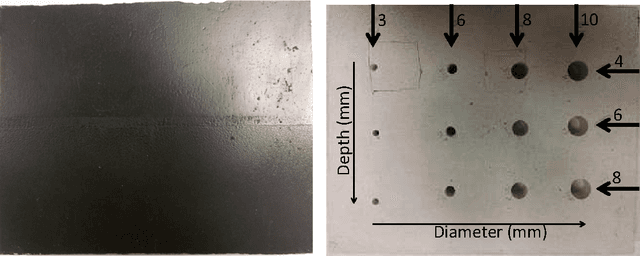
Monitoring the health of ancient artworks requires adequate prudence because of the sensitive nature of these materials. Classical techniques for identifying the development of faults rely on acoustic testing. These techniques, being invasive, may result in causing permanent damage to the material, especially if the material is inspected periodically. Non destructive testing has been carried out for different materials since long. In this regard, non-invasive systems were developed based on infrared thermometry principle to identify the faults in artworks. The test artwork is heated and the thermal response of the different layers is captured with the help of a thermal infrared camera. However, prolonged heating risks overheating and thus causing damage to artworks and an alternate approach is to use pseudo-random binary sequence excitations. The faults in the artwork, though, cannot be detected on the captured images, especially if their strength is weak. The weaker faults are either masked by the stronger ones, by the pictorial layer of the artwork or by the non-uniform heating. This work addresses the detection and localization of the faults through a wavelet based subspace decomposition scheme. The proposed scheme, on one hand, allows to remove the background while, on the other hand, removes the undesired high frequency noise. It is shown that the detection parameter is proportional to the diameter and the depth of the fault. A criterion is proposed to select the optimal wavelet basis along with suitable level selection for wavelet decomposition and reconstruction. The proposed approach is tested on a laboratory developed test sample with known fault locations and dimensions as well as real artworks. A comparison with a previously reported method demonstrates the efficacy of the proposed approach for fault detection in artworks.
Low Cost Semi-Autonomous Agricultural Robots In Pakistan-Vision Based Navigation Scalable methodology for wheat harvesting
Jan 10, 2015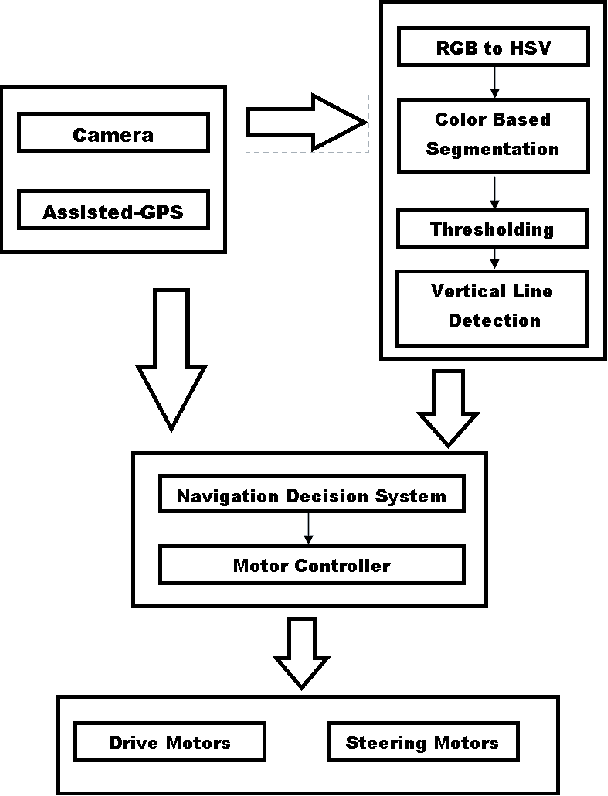


Robots have revolutionized our way of life in recent years.One of the domains that has not yet completely benefited from the robotic automation is the agricultural sector. Agricultural Robotics should complement humans in the arduous tasks during different sub-domains of this sector. Extensive research in Agricultural Robotics has been carried out in Japan, USA, Australia and Germany focusing mainly on the heavy agricultural machinery. Pakistan is an agricultural rich country and its economy and food security are closely tied with agriculture in general and wheat in particular. However, agricultural research in Pakistan is still carried out using the conventional methodologies. This paper is an attempt to trigger the research in this modern domain so that we can benefit from cost effective and resource efficient autonomous agricultural methodologies. This paper focuses on a scalable low cost semi-autonomous technique for wheat harvest which primarily focuses on the farmers with small land holdings. The main focus will be on the vision part of the navigation system deployed by the proposed robot.