 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimplified vision based automatic navigation for wheat harvesting in low income economies
Paper and Code
Jan 10, 2015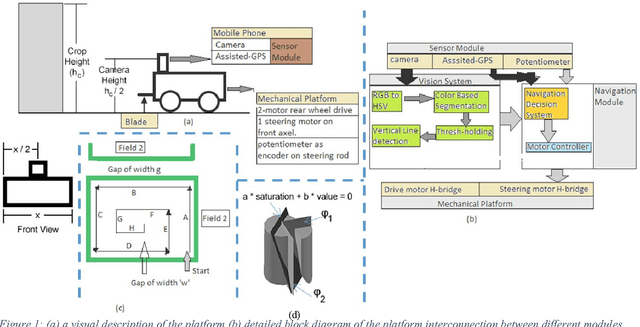
Recent developments in the domain of agricultural robotics have resulted in development of complex and efficient systems. Most of the land owners in the South Asian region are low income farmers. The agricultural experience for them is still a completely manual process. However, the extreme weather conditions, heat and flooding, often combine to put a lot of stress on these small land owners and the associated labor. In this paper, we propose a prototype for an automated power reaper for the wheat crop. This automated vehicle is navigated using a simple vision based approach employing the low-cost camera and assisted GPS. The mechanical platform is driven by three motors controlled through an interface between the proposed vision algorithm and the electrical drive. The proposed methodology is applied on some real field scenarios to demonstrate the efficiency of the vision based algorithm.