 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDirection of slip modulates the perception of slip distance and slip speed
Mar 08, 2024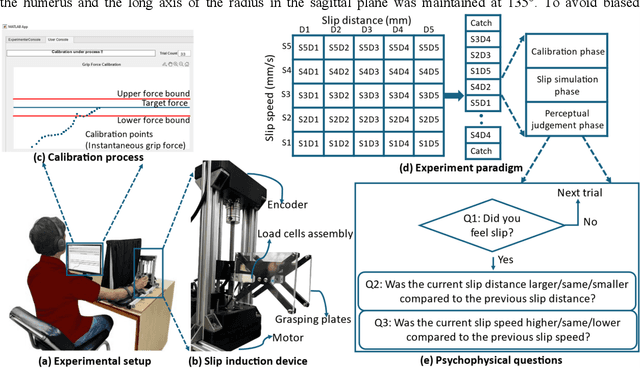



Purpose: The purpose of this study was to investigate the psychophysical understanding of the slip stimulus. We emphasized that the perception of slip and its characteristics, such as slip distance and slip speed depend on the interaction between slip direction, slip distance as well as slip speed. Methods: We developed a novel slip induction device to simulate the artificial sense of slip. We conducted a psychophysical experiment on eight healthy subjects. The experiment was designed to evaluate the effect of slip direction on slip perception as well as on the perception of slip distance and slip speed. A series of psychophysical questions were asked at the end of the slip stimulation to record the subjective responses of the participants. The average success rate (%) was used to quantify the subject responses. Results: We demonstrated that the perception of slip is independent of slip direction however, perception of slip distance and slip speed are significantly modulated by slip direction. We also observed that a significant interaction exists between slip distance and slip speed in the upward slip direction. It was also observed that the average success rate was significantly different for various combinations of slip distance and slip speed in the upward slip direction. Conclusions: Our study clearly establishes a significant interaction between the slip direction, slip distance, and slip speed for psychophysical understanding of the perception of slip distance and slip speed.
Sparse Wearable Sonomyography Sensor-based Proprioceptive Proportional Control Across Multiple Gestures
Mar 08, 2024
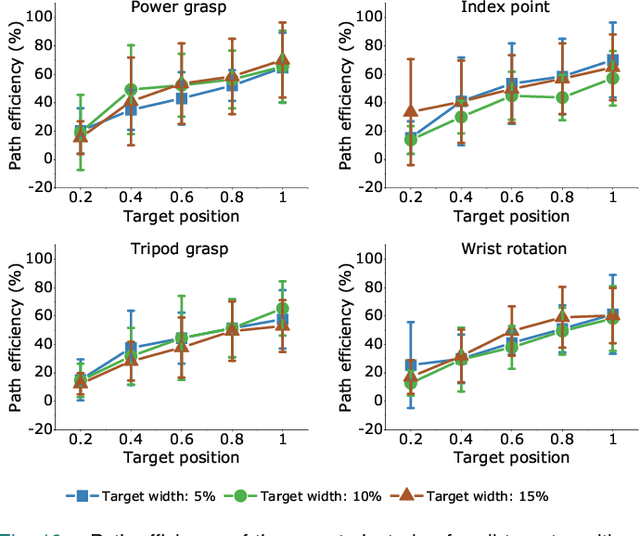


Sonomyography (SMG) is a non-invasive technique that uses ultrasound imaging to detect the dynamic activity of muscles. Wearable SMG systems have recently gained popularity due to their potential as human-computer interfaces for their superior performance compared to conventional methods. This paper demonstrates real-time positional proportional control of multiple gestures using a multiplexed 8-channel wearable SMG system. The amplitude-mode ultrasound signals from the SMG system were utilized to detect muscle activity from the forearm of 8 healthy individuals. The derived signals were used to control the on-screen movement of the cursor. A target achievement task was performed to analyze the performance of our SMG-based human-machine interface. Our wearable SMG system provided accurate, stable, and intuitive control in real-time by achieving an average success rate greater than 80% with all gestures. Furthermore, the wearable SMG system's abilities to detect volitional movement and decode movement kinematic information from SMG trajectories using standard performance metrics were evaluated. Our results provide insights to validate SMG as an intuitive human-machine interface.
A Sonomyography-based Muscle Computer Interface for Individuals with Spinal Cord Injury
Aug 02, 2023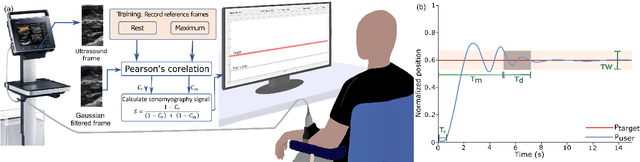
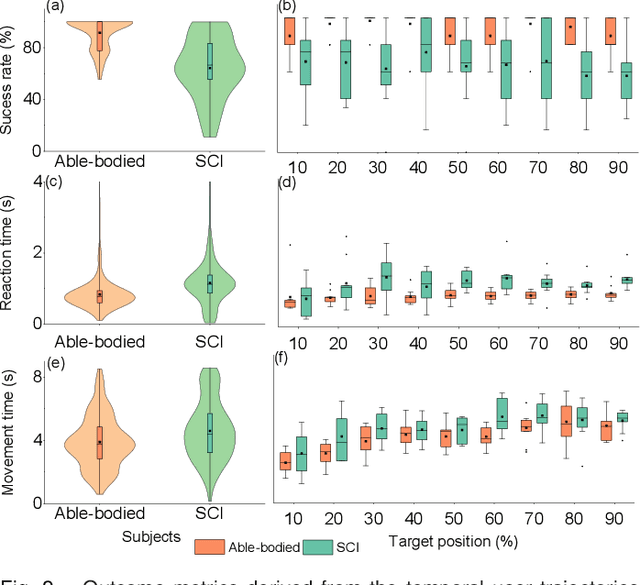
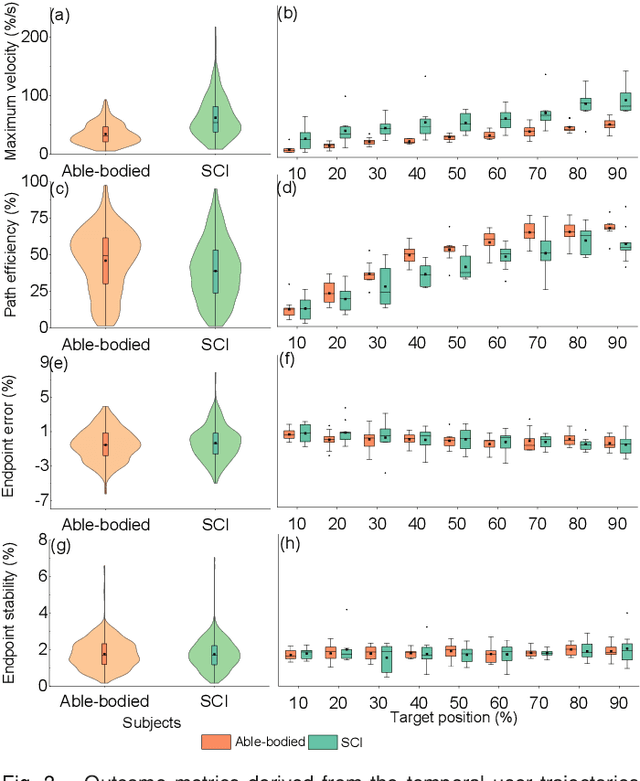
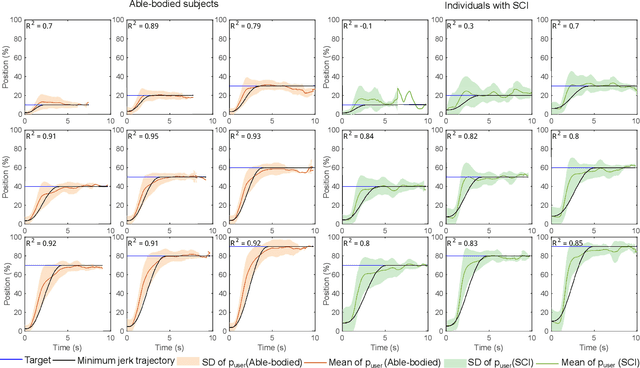
Impairment of hand functions in individuals with spinal cord injury (SCI) severely disrupts activities of daily living. Recent advances have enabled rehabilitation assisted by robotic devices to augment the residual function of the muscles. Traditionally, non-invasive electromyography-based peripheral neural interfaces have been utilized to sense volitional motor intent to drive robotic assistive devices. However, the dexterity and fidelity of control that can be achieved with electromyography-based control have been limited due to inherent limitations in signal quality. We have developed and tested a muscle-computer interface (MCI) utilizing sonomyography to provide control of a virtual cursor for individuals with motor-incomplete spinal cord injury. We demonstrate that individuals with SCI successfully gained control of a virtual cursor by utilizing contractions of muscles of the wrist joint. The sonomyography-based interface enabled control of the cursor at multiple graded levels demonstrating the ability to achieve accurate and stable endpoint control. Our sonomyography-based muscle-computer interface can enable dexterous control of upper-extremity assistive devices for individuals with motor-incomplete SCI.
Sparsity Analysis of a Sonomyographic Muscle-Computer Interface
Sep 06, 2018
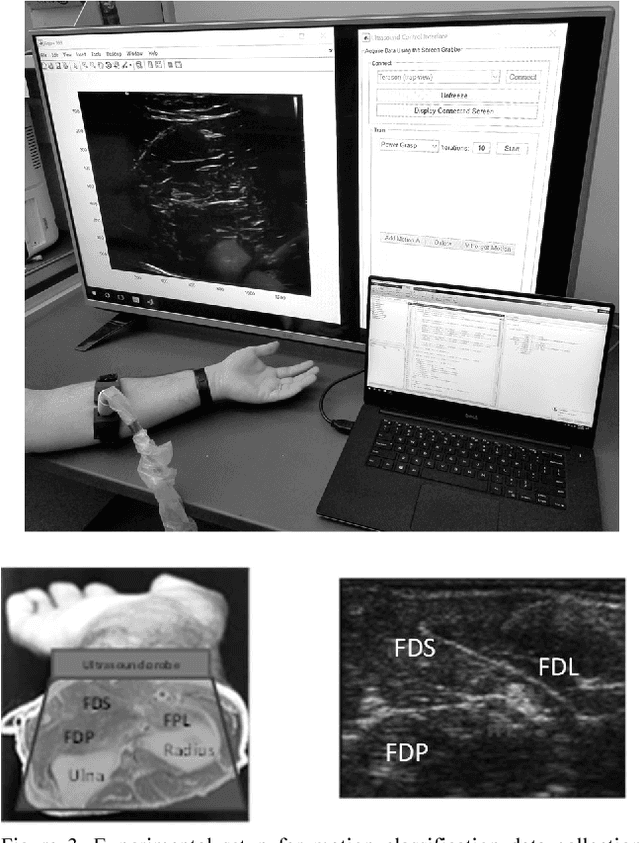
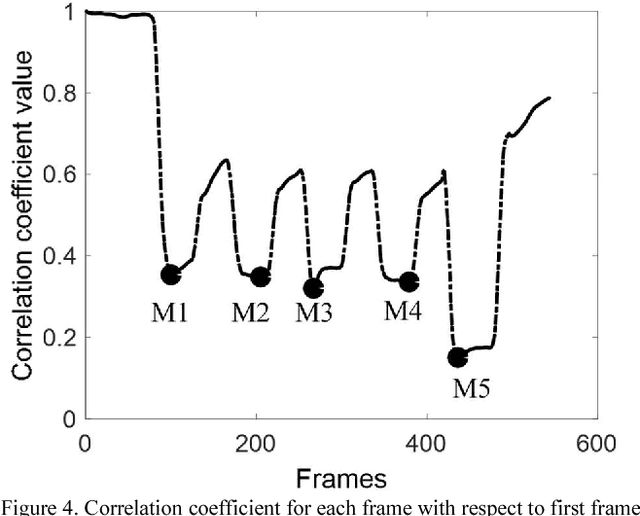
Objective: The objectives of this paper are to determine the optimal location for ultrasound transducer placement on the anterior forearm for imaging maximum muscle deformations during different hand motions and to investigate the effect of using a sparse set of ultrasound scanlines for motion classification for ultrasound-based muscle computer interfaces (MCIs). Methods: The optimal placement of the ultrasound transducer along the forearm is identified using freehand 3D reconstructions of the muscle thickness during rest and motion completion. From the ultrasound images acquired from the optimally placed transducer, we determine classification accuracy with equally spaced scanlines across the cross-sectional field-of-view (FOV). Furthermore, we investigated the unique contribution of each scanline to class discrimination using Fisher criteria (FC) and mutual information (MI) with respect to motion discriminability. Results: Experiments with 5 able-bodied subjects show that the maximum muscle deformation occurred between 30-50% of the forearm length for multiple degrees-of-freedom. The average classification accuracy was 94.6% with the entire 128 scanline image and 94.5% with 4 equally-spaced scanlines. However, no significant improvement in classification accuracy was observed with optimal scanline selection using FC and MI. Conclusion: For an optimally placed transducer, a small subset of ultrasound scanlines can be used instead of a full imaging array without sacrificing performance in terms of classification accuracy for multiple degrees-of-freedom. Significance: The selection of a small subset of transducer elements can enable the reduction of computation, and simplification of the instrumentation and power consumption of wearable sonomyographic MCIs particularly for rehabilitation and gesture recognition applications.
Proprioceptive Sonomyographic Control: A novel method of intuitive proportional control of multiple degrees of freedom for upper-extremity amputees
Aug 20, 2018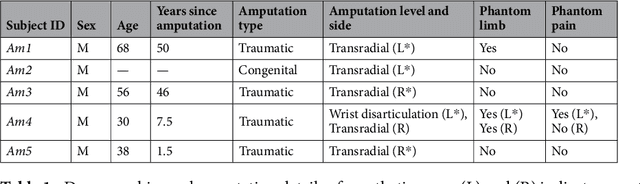
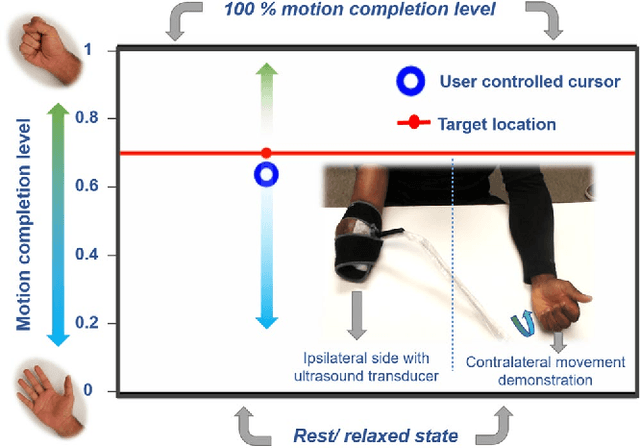
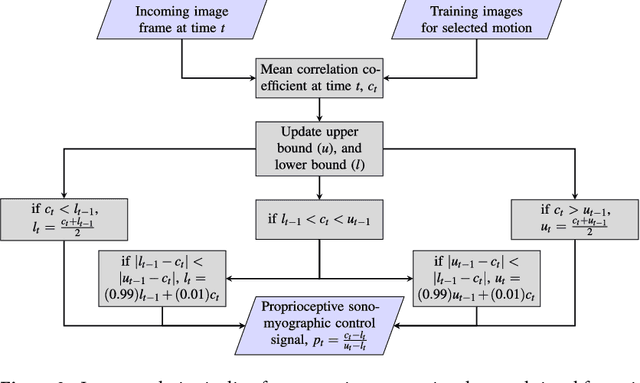
Technological advances in multi-articulated prosthetic hands have outpaced the methods available to amputees to intuitively control these devices. Amputees often cite difficulty of use as a key contributing factor for abandoning their prosthesis, creating a pressing need for improved control technology. A major challenge of traditional myoelectric control strategies using surface electromyography electrodes has been the difficulty in achieving intuitive and robust proportional control of multiple degrees of freedom. In this paper, we describe a new control method, proprioceptive sonomyographic control that overcomes several limitations of myoelectric control. In sonomyography, muscle mechanical deformation is sensed using ultrasound, as compared to electrical activation, and therefore the resulting control signals can directly control the position of the end effector. Compared to myoelectric control which controls the velocity of the end-effector device, sonomyographic control is more congruent with residual proprioception in the residual limb. We tested our approach with 5 upper-extremity amputees and able-bodied subjects using a virtual target achievement and holding task. Amputees and able-bodied participants demonstrated the ability to achieve positional control for 5 degrees of freedom with an hour of training. Our results demonstrate the potential of proprioceptive sonomyographic control for intuitive dexterous control of multiarticulated prostheses.