 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSparse Wearable Sonomyography Sensor-based Proprioceptive Proportional Control Across Multiple Gestures
Mar 08, 2024
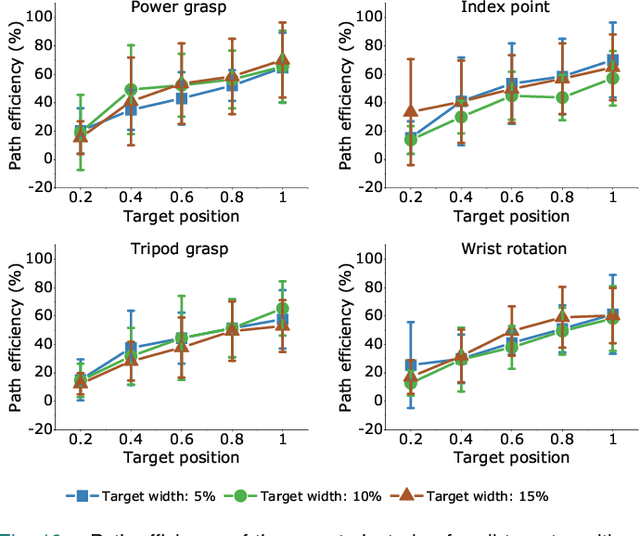


Sonomyography (SMG) is a non-invasive technique that uses ultrasound imaging to detect the dynamic activity of muscles. Wearable SMG systems have recently gained popularity due to their potential as human-computer interfaces for their superior performance compared to conventional methods. This paper demonstrates real-time positional proportional control of multiple gestures using a multiplexed 8-channel wearable SMG system. The amplitude-mode ultrasound signals from the SMG system were utilized to detect muscle activity from the forearm of 8 healthy individuals. The derived signals were used to control the on-screen movement of the cursor. A target achievement task was performed to analyze the performance of our SMG-based human-machine interface. Our wearable SMG system provided accurate, stable, and intuitive control in real-time by achieving an average success rate greater than 80% with all gestures. Furthermore, the wearable SMG system's abilities to detect volitional movement and decode movement kinematic information from SMG trajectories using standard performance metrics were evaluated. Our results provide insights to validate SMG as an intuitive human-machine interface.
A Sonomyography-based Muscle Computer Interface for Individuals with Spinal Cord Injury
Aug 02, 2023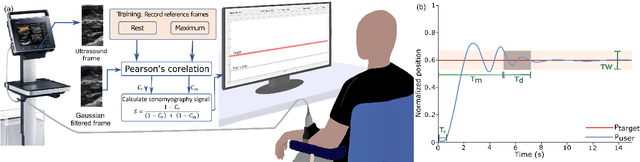
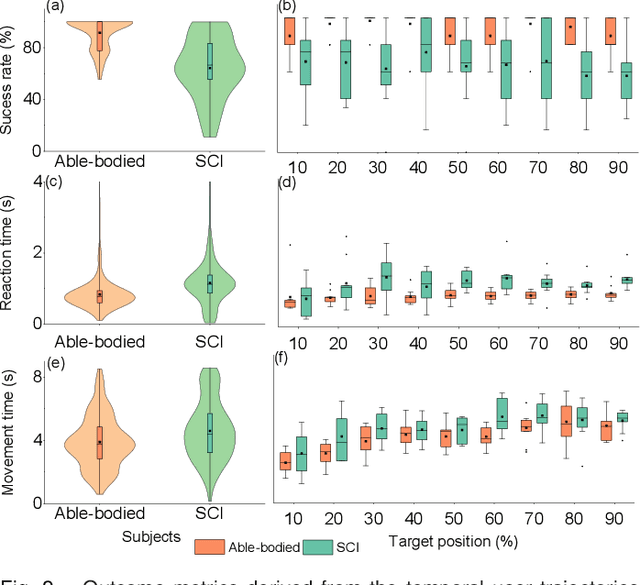
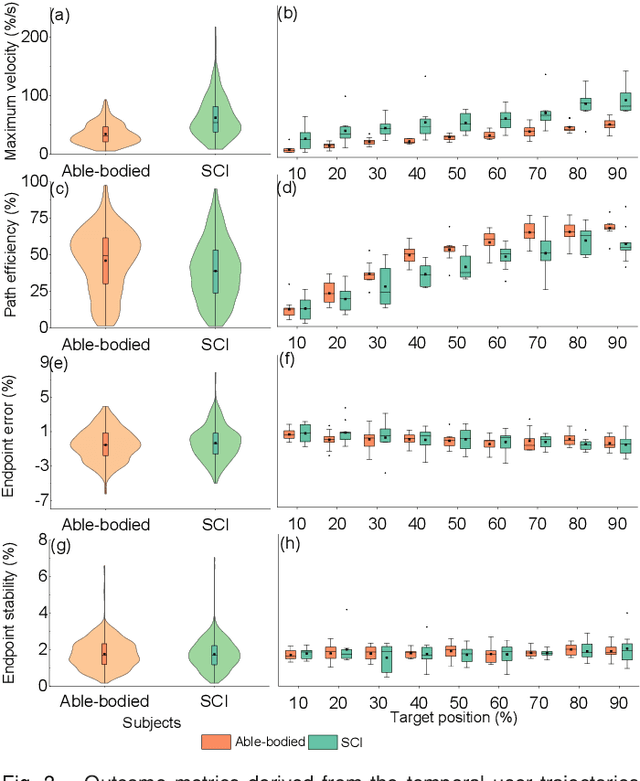
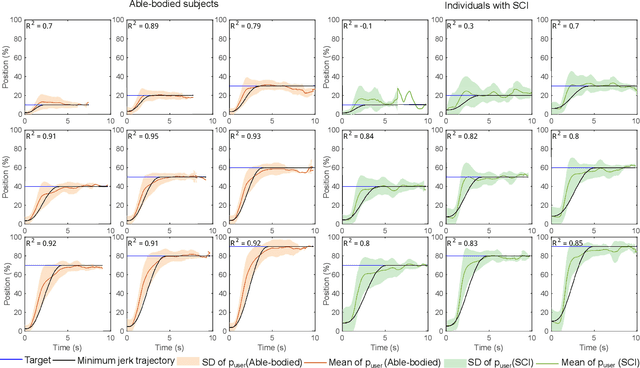
Impairment of hand functions in individuals with spinal cord injury (SCI) severely disrupts activities of daily living. Recent advances have enabled rehabilitation assisted by robotic devices to augment the residual function of the muscles. Traditionally, non-invasive electromyography-based peripheral neural interfaces have been utilized to sense volitional motor intent to drive robotic assistive devices. However, the dexterity and fidelity of control that can be achieved with electromyography-based control have been limited due to inherent limitations in signal quality. We have developed and tested a muscle-computer interface (MCI) utilizing sonomyography to provide control of a virtual cursor for individuals with motor-incomplete spinal cord injury. We demonstrate that individuals with SCI successfully gained control of a virtual cursor by utilizing contractions of muscles of the wrist joint. The sonomyography-based interface enabled control of the cursor at multiple graded levels demonstrating the ability to achieve accurate and stable endpoint control. Our sonomyography-based muscle-computer interface can enable dexterous control of upper-extremity assistive devices for individuals with motor-incomplete SCI.