 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Sonomyography-based Muscle Computer Interface for Individuals with Spinal Cord Injury
Aug 02, 2023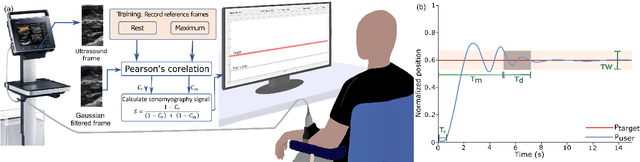
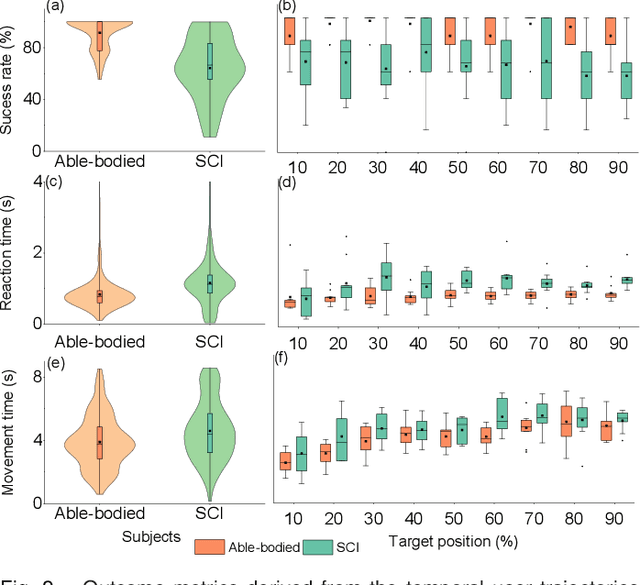
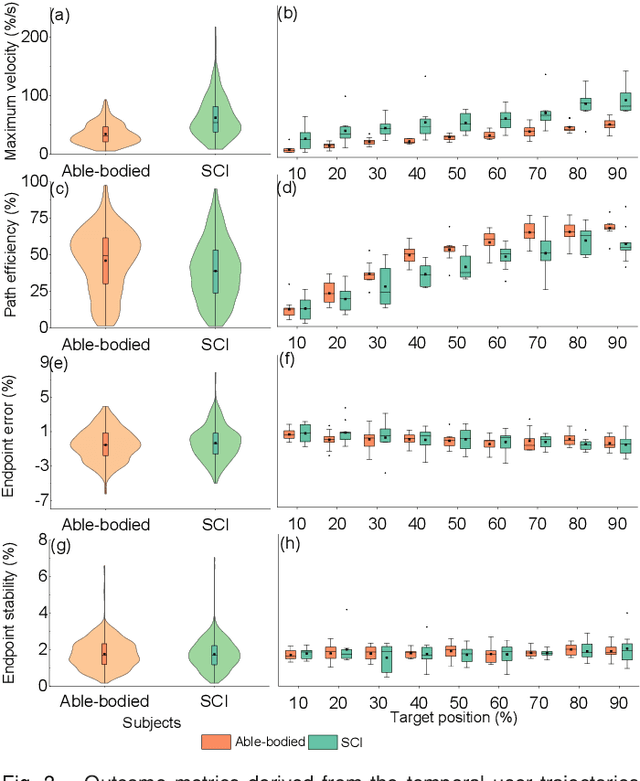
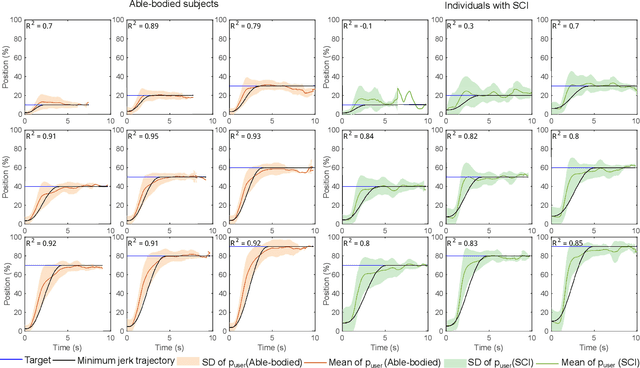
Impairment of hand functions in individuals with spinal cord injury (SCI) severely disrupts activities of daily living. Recent advances have enabled rehabilitation assisted by robotic devices to augment the residual function of the muscles. Traditionally, non-invasive electromyography-based peripheral neural interfaces have been utilized to sense volitional motor intent to drive robotic assistive devices. However, the dexterity and fidelity of control that can be achieved with electromyography-based control have been limited due to inherent limitations in signal quality. We have developed and tested a muscle-computer interface (MCI) utilizing sonomyography to provide control of a virtual cursor for individuals with motor-incomplete spinal cord injury. We demonstrate that individuals with SCI successfully gained control of a virtual cursor by utilizing contractions of muscles of the wrist joint. The sonomyography-based interface enabled control of the cursor at multiple graded levels demonstrating the ability to achieve accurate and stable endpoint control. Our sonomyography-based muscle-computer interface can enable dexterous control of upper-extremity assistive devices for individuals with motor-incomplete SCI.
Proprioceptive Sonomyographic Control: A novel method of intuitive proportional control of multiple degrees of freedom for upper-extremity amputees
Aug 20, 2018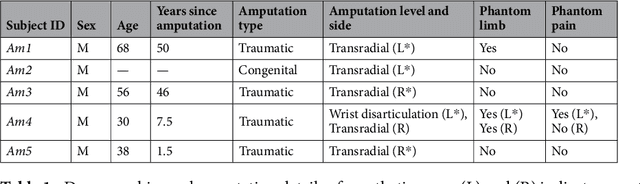
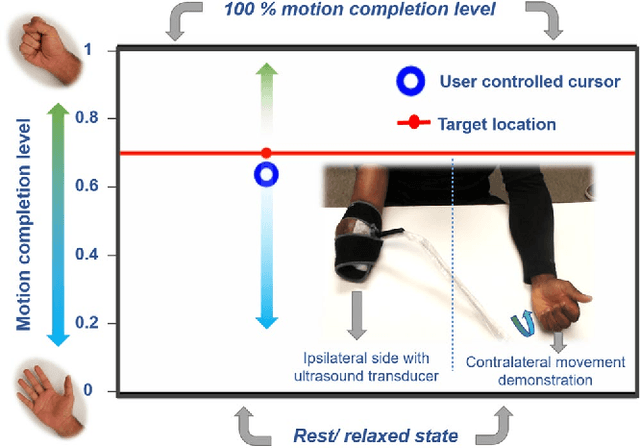
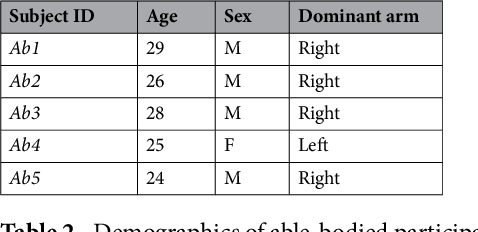
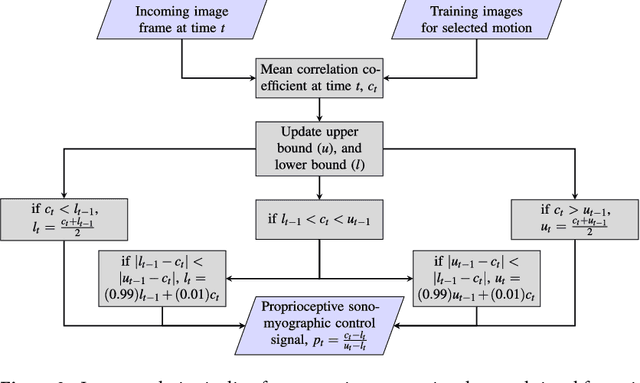
Technological advances in multi-articulated prosthetic hands have outpaced the methods available to amputees to intuitively control these devices. Amputees often cite difficulty of use as a key contributing factor for abandoning their prosthesis, creating a pressing need for improved control technology. A major challenge of traditional myoelectric control strategies using surface electromyography electrodes has been the difficulty in achieving intuitive and robust proportional control of multiple degrees of freedom. In this paper, we describe a new control method, proprioceptive sonomyographic control that overcomes several limitations of myoelectric control. In sonomyography, muscle mechanical deformation is sensed using ultrasound, as compared to electrical activation, and therefore the resulting control signals can directly control the position of the end effector. Compared to myoelectric control which controls the velocity of the end-effector device, sonomyographic control is more congruent with residual proprioception in the residual limb. We tested our approach with 5 upper-extremity amputees and able-bodied subjects using a virtual target achievement and holding task. Amputees and able-bodied participants demonstrated the ability to achieve positional control for 5 degrees of freedom with an hour of training. Our results demonstrate the potential of proprioceptive sonomyographic control for intuitive dexterous control of multiarticulated prostheses.