 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Adaptation for Myographic Control of Natural Dexterous Hand and Finger Movements
Dec 23, 2024One of the most elusive goals in myographic prosthesis control is the ability to reliably decode continuous positions simultaneously across multiple degrees-of-freedom. Goal: To demonstrate dexterous, natural, biomimetic finger and wrist control of the highly advanced robotic Modular Prosthetic Limb. Methods: We combine sequential temporal regression models and reinforcement learning using myographic signals to predict continuous simultaneous predictions of 7 finger and wrist degrees-of-freedom for 9 non-amputee human subjects in a minimally-constrained freeform training process. Results: We demonstrate highly dexterous 7 DoF position-based regression for prosthesis control from EMG signals, with significantly lower error rates than traditional approaches (p < 0.001) and nearly zero prediction response time delay (p < 0.001). Their performance can be continuously improved at any time using our freeform reinforcement process. Significance: We have demonstrated the most dexterous, biomimetic, and natural prosthesis control performance ever obtained from the surface EMG signal. Our reinforcement approach allowed us to abandon standard training protocols and simply allow the subject to move in any desired way while our models adapt. Conclusions: This work redefines the state-of-the-art in myographic decoding in terms of the reliability, responsiveness, and movement complexity available from prosthesis control systems. The present-day emergence and convergence of advanced algorithmic methods, experiment protocols, dexterous robotic prostheses, and sensor modalities represents a unique opportunity to finally realize our ultimate goal of achieving fully restorative natural upper-limb function for amputees.
Proprioceptive Sonomyographic Control: A novel method of intuitive proportional control of multiple degrees of freedom for upper-extremity amputees
Aug 20, 2018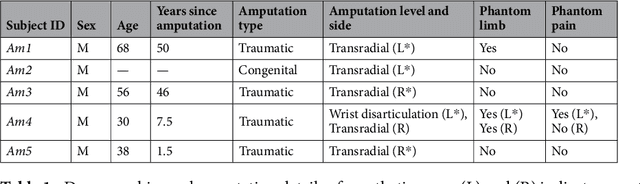
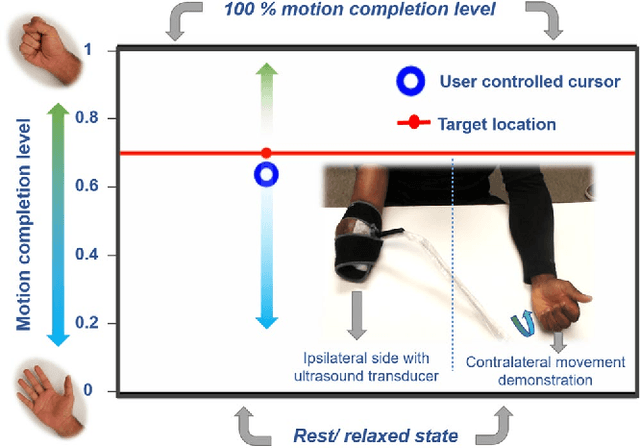
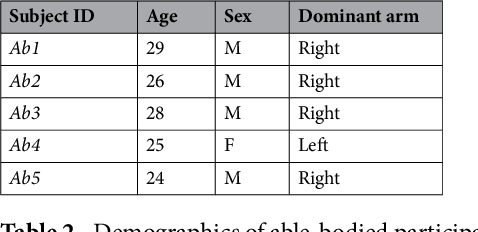
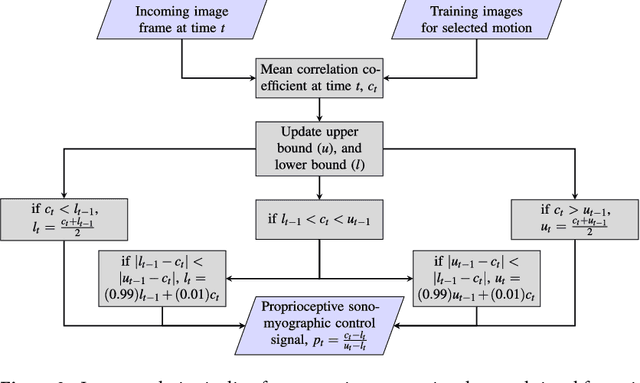
Technological advances in multi-articulated prosthetic hands have outpaced the methods available to amputees to intuitively control these devices. Amputees often cite difficulty of use as a key contributing factor for abandoning their prosthesis, creating a pressing need for improved control technology. A major challenge of traditional myoelectric control strategies using surface electromyography electrodes has been the difficulty in achieving intuitive and robust proportional control of multiple degrees of freedom. In this paper, we describe a new control method, proprioceptive sonomyographic control that overcomes several limitations of myoelectric control. In sonomyography, muscle mechanical deformation is sensed using ultrasound, as compared to electrical activation, and therefore the resulting control signals can directly control the position of the end effector. Compared to myoelectric control which controls the velocity of the end-effector device, sonomyographic control is more congruent with residual proprioception in the residual limb. We tested our approach with 5 upper-extremity amputees and able-bodied subjects using a virtual target achievement and holding task. Amputees and able-bodied participants demonstrated the ability to achieve positional control for 5 degrees of freedom with an hour of training. Our results demonstrate the potential of proprioceptive sonomyographic control for intuitive dexterous control of multiarticulated prostheses.