 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDual-Attention Based 3D Channel Estimation
Apr 02, 2026For multi-input and multi-output (MIMO) channels, the optimal channel estimation (CE) based on linear minimum mean square error (LMMSE) requires three-dimensional (3D) filtering. However, the complexity is often prohibitive due to large matrix dimensions. Suboptimal estimators approximate 3DCE by decomposing it into time, frequency, and spatial domains, while yields noticeable performance degradation under correlated MIMO channels. On the other hand, recent advances in deep learning (DL) can explore channel correlations in all domains via attention mechanisms. Building on this capability, we propose a dual attention mechanism based 3DCE network (3DCENet) that can achieve accurate estimates.
Invariant Transformation and Resampling based Epistemic-Uncertainty Reduction
Feb 26, 2026An artificial intelligence (AI) model can be viewed as a function that maps inputs to outputs in high-dimensional spaces. Once designed and well trained, the AI model is applied for inference. However, even optimized AI models can produce inference errors due to aleatoric and epistemic uncertainties. Interestingly, we observed that when inferring multiple samples based on invariant transformations of an input, inference errors can show partial independences due to epistemic uncertainty. Leveraging this insight, we propose a "resampling" based inferencing that applies to a trained AI model with multiple transformed versions of an input, and aggregates inference outputs to a more accurate result. This approach has the potential to improve inference accuracy and offers a strategy for balancing model size and performance.
Reconfigurable AI Modules Aided Channel Estimation and MIMO Detection
Jan 29, 2024Deep learning (DL) based channel estimation (CE) and multiple input and multiple output detection (MIMODet), as two separate research topics, have provided convinced evidence to demonstrate the effectiveness and robustness of artificial intelligence (AI) for receiver design. However, problem remains on how to unify the CE and MIMODet by optimizing AI's structure to achieve near optimal detection performance such as widely considered QR with M-algorithm (QRM) that can perform close to the maximum likelihood (ML) detector. In this paper, we propose an AI receiver that connects CE and MIMODet as an unified architecture. As a merit, CE and MIMODet only adopt structural input features and conventional neural networks (NN) to perform end-to-end (E2E) training offline. Numerical results show that, by adopting a simple super-resolution based convolutional neural network (SRCNN) as channel estimator and domain knowledge enhanced graphical neural network (GNN) as detector, the proposed QRM enhanced GNN receiver (QRMNet) achieves comparable block error rate (BLER) performance to near-optimal baseline detectors.
Channel Estimation based on Gaussian Mixture Models with Structured Covariances
May 07, 2022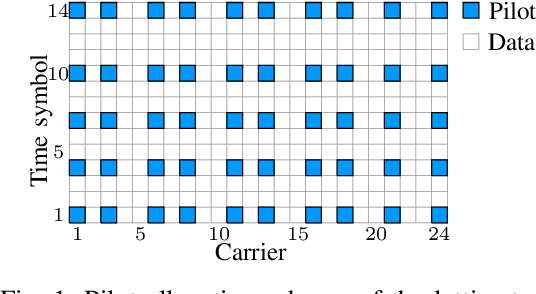
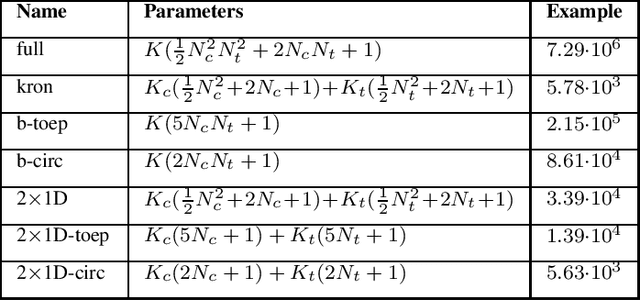
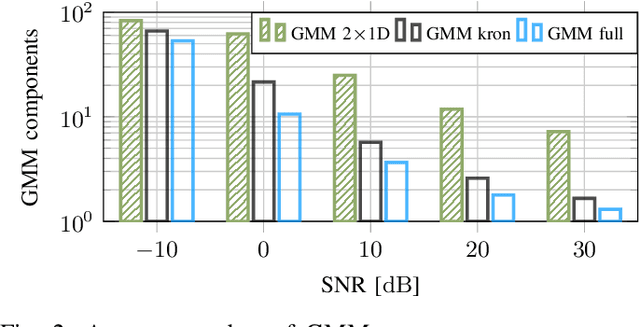
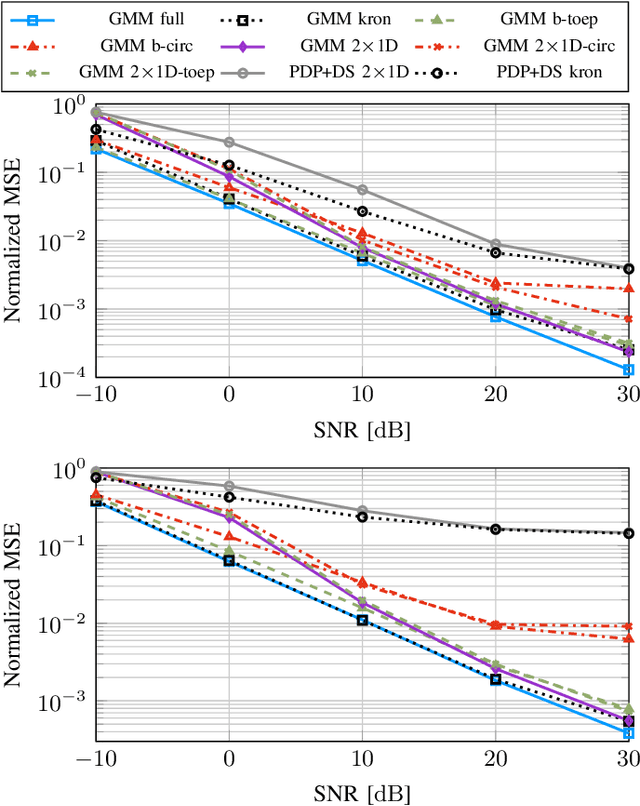
In this work, we propose variations of a Gaussian mixture model (GMM) based channel estimator that was recently proven to be asymptotically optimal in the minimum mean square error (MMSE) sense. We account for the need of low computational complexity in the online estimation and low cost for training and storage in practical applications. To this end, we discuss modifications of the underlying expectation-maximization (EM) algorithm, which is needed to fit the parameters of the GMM, to allow for structurally constrained covariances. Further, we investigate splitting the 2D time and frequency estimation problem in wideband systems into cascaded 1D estimations with the help of the GMM. The proposed cascaded GMM approach drastically reduces the complexity and memory requirements. We observe that due to the training on realistic channel data, the proposed GMM estimators seem to inherently perform a trade-off between saving complexity/parameters and estimation performance. We compare these low-complexity approaches to a practical and low cost method that relies on the power delay profile (PDP) and the Doppler spectrum (DS). We argue that, with the training on scenario-specific data from the environment, these practical baselines are outperformed by far with equal estimation complexity.
Neural fidelity warping for efficient robot morphology design
Dec 09, 2020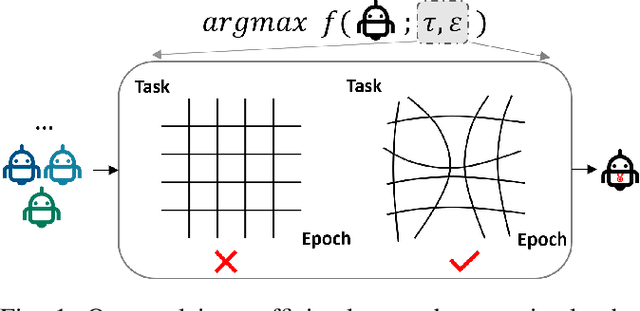
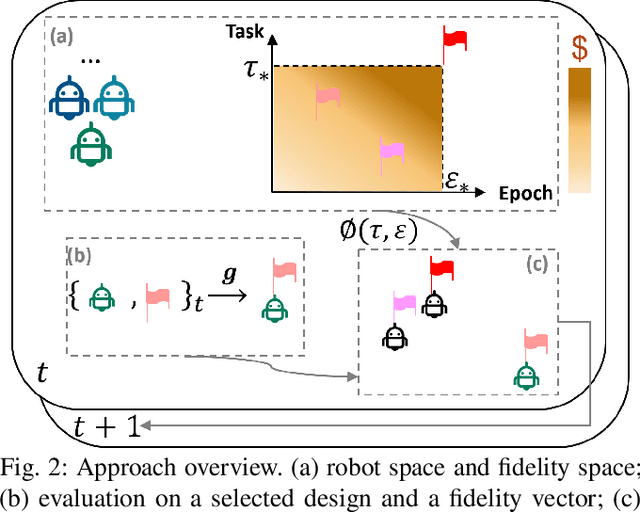
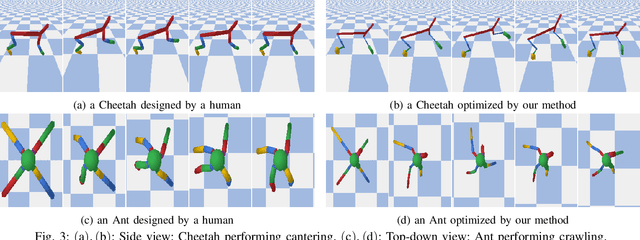
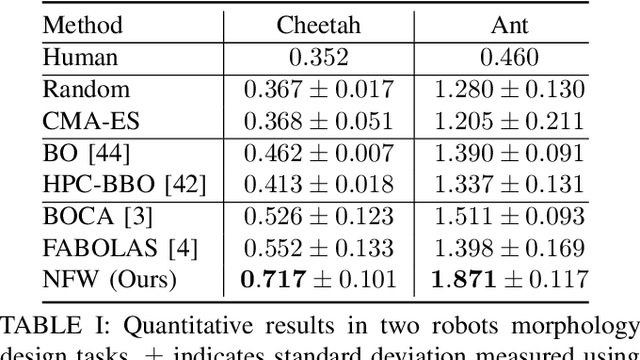
We consider the problem of optimizing a robot morphology to achieve the best performance for a target task, under computational resource limitations. The evaluation process for each morphological design involves learning a controller for the design, which can consume substantial time and computational resources. To address the challenge of expensive robot morphology evaluation, we present a continuous multi-fidelity Bayesian Optimization framework that efficiently utilizes computational resources via low-fidelity evaluations. We identify the problem of non-stationarity over fidelity space. Our proposed fidelity warping mechanism can learn representations of learning epochs and tasks to model non-stationary covariances between continuous fidelity evaluations which prove challenging for off-the-shelf stationary kernels. Various experiments demonstrate that our method can utilize the low-fidelity evaluations to efficiently search for the optimal robot morphology, outperforming state-of-the-art methods.
Holographic MIMO Surfaces for 6G Wireless Networks: Opportunities, Challenges, and Trends
Dec 01, 2019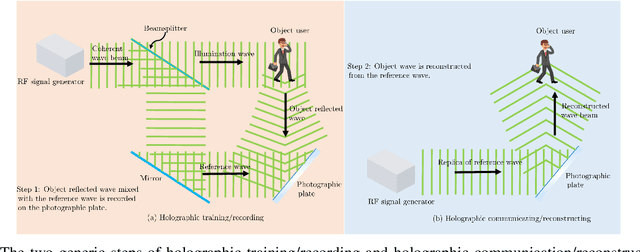
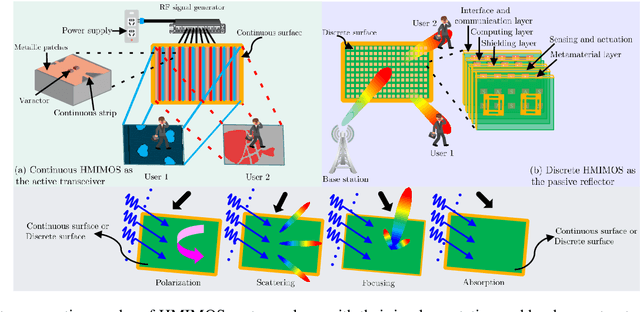
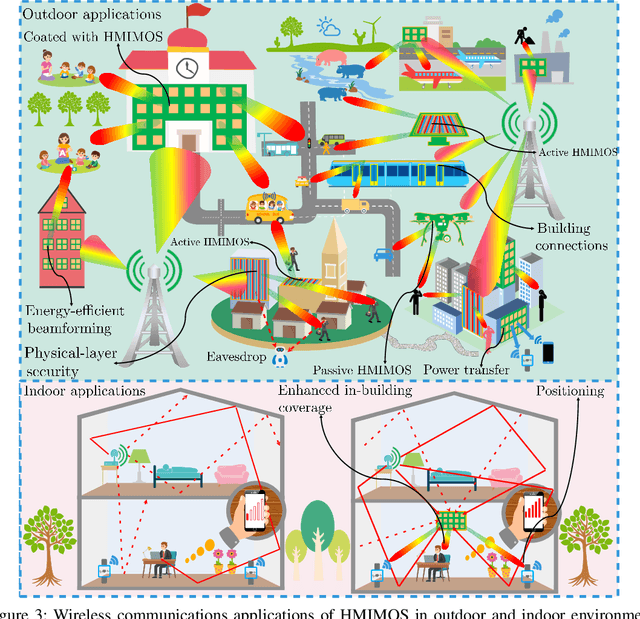
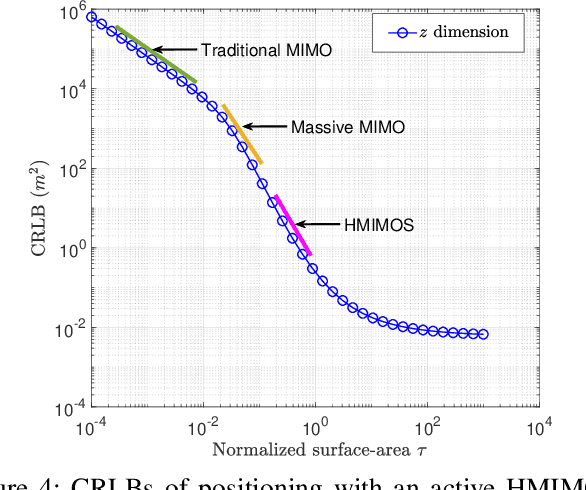
Future wireless networks are expected to evolve towards an intelligent and software reconfigurable functionality paradigm enabling ubiquitous communication between humans and mobile devices, but also being capable of sensing, controlling, and optimizing the wireless environment to fulfill the visions of low powered, high throughput, massive connectivity, and low latency communications. A key conceptual enabler that is recently gaining increasing popularity is the Holographic Multiple Input Multiple Output Surface (HMIMOS) that refers to a low cost transformative wireless planar structure comprising of sub-wavelength metallic or dielectric scattering particles, which is capable of impacting electromagnetic waves according to desired objectives. In this article, we provide an overview of HMIMOS communications by introducing the available hardware architectures for reconfigurable metasurfaces and their main characteristics, as well as highlighting the opportunities and key design challenges when multiple HMIMOS are considered.
Relational Graph Learning for Crowd Navigation
Oct 01, 2019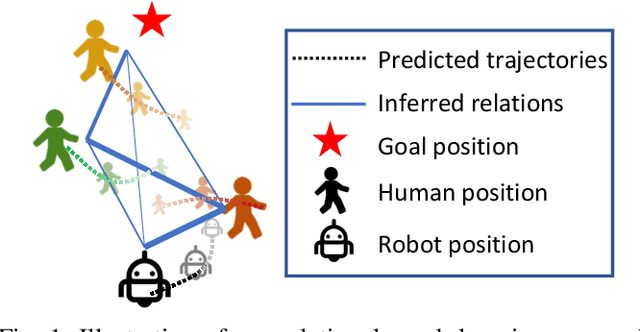
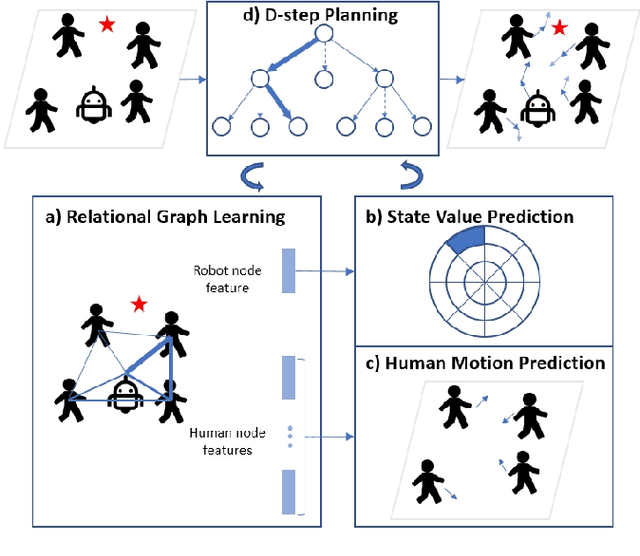
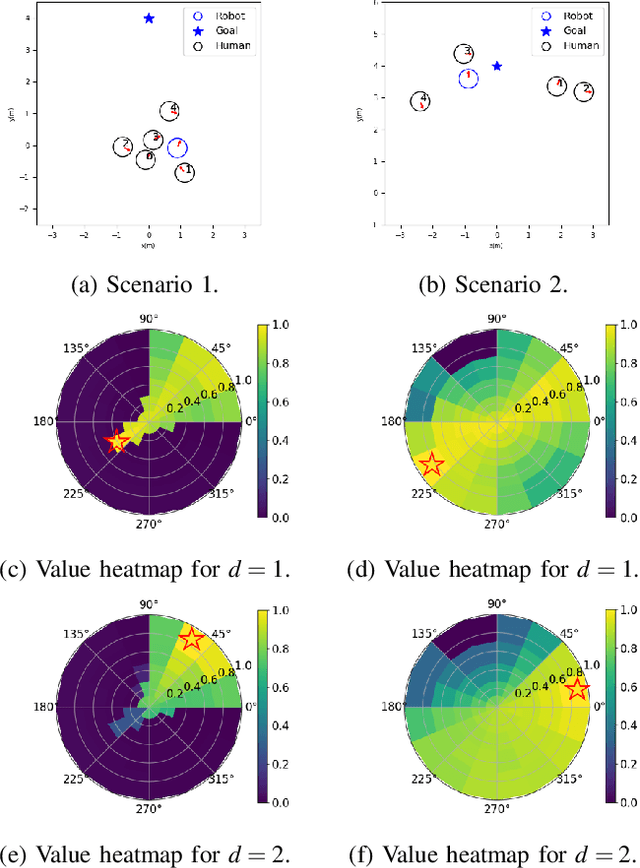
We present a relational graph learning approach for robotic crowd navigation using model-based deep reinforcement learning that plans actions by looking into the future. Our approach reasons about the relations between all agents based on their latent features and uses a Graph Convolutional Network to encode higher-order interactions in each agent's state representation, which is subsequently leveraged for state prediction and value estimation. The ability to predict human motion allows us to perform multi-step lookahead planning, taking into account the temporal evolution of human crowds. We evaluate our approach against a state-of-the-art baseline for crowd navigation and ablations of our model to demonstrate that navigation with our approach is more efficient, results in fewer collisions, and avoids failure cases involving oscillatory and freezing behaviors.