 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOne-step Language Modeling via Continuous Denoising
Feb 18, 2026Language models based on discrete diffusion have attracted widespread interest for their potential to provide faster generation than autoregressive models. In practice, however, they exhibit a sharp degradation of sample quality in the few-step regime, failing to realize this promise. Here we show that language models leveraging flow-based continuous denoising can outperform discrete diffusion in both quality and speed. By revisiting the fundamentals of flows over discrete modalities, we build a flow-based language model (FLM) that performs Euclidean denoising over one-hot token encodings. We show that the model can be trained by predicting the clean data via a cross entropy objective, where we introduce a simple time reparameterization that greatly improves training stability and generation quality. By distilling FLM into its associated flow map, we obtain a distilled flow map language model (FMLM) capable of few-step generation. On the LM1B and OWT language datasets, FLM attains generation quality matching state-of-the-art discrete diffusion models. With FMLM, our approach outperforms recent few-step language models across the board, with one-step generation exceeding their 8-step quality. Our work calls into question the widely held hypothesis that discrete diffusion processes are necessary for generative modeling over discrete modalities, and paves the way toward accelerated flow-based language modeling at scale. Code is available at https://github.com/david3684/flm.
Inverting Data Transformations via Diffusion Sampling
Feb 09, 2026We study the problem of transformation inversion on general Lie groups: a datum is transformed by an unknown group element, and the goal is to recover an inverse transformation that maps it back to the original data distribution. Such unknown transformations arise widely in machine learning and scientific modeling, where they can significantly distort observations. We take a probabilistic view and model the posterior over transformations as a Boltzmann distribution defined by an energy function on data space. To sample from this posterior, we introduce a diffusion process on Lie groups that keeps all updates on-manifold and only requires computations in the associated Lie algebra. Our method, Transformation-Inverting Energy Diffusion (TIED), relies on a new trivialized target-score identity that enables efficient score-based sampling of the transformation posterior. As a key application, we focus on test-time equivariance, where the objective is to improve the robustness of pretrained neural networks to input transformations. Experiments on image homographies and PDE symmetries demonstrate that TIED can restore transformed inputs to the training distribution at test time, showing improved performance over strong canonicalization and sampling baselines. Code is available at https://github.com/jw9730/tied.
FlowBind: Efficient Any-to-Any Generation with Bidirectional Flows
Dec 17, 2025



Any-to-any generation seeks to translate between arbitrary subsets of modalities, enabling flexible cross-modal synthesis. Despite recent success, existing flow-based approaches are challenged by their inefficiency, as they require large-scale datasets often with restrictive pairing constraints, incur high computational cost from modeling joint distribution, and rely on complex multi-stage training. We propose FlowBind, an efficient framework for any-to-any generation. Our approach is distinguished by its simplicity: it learns a shared latent space capturing cross-modal information, with modality-specific invertible flows bridging this latent to each modality. Both components are optimized jointly under a single flow-matching objective, and at inference the invertible flows act as encoders and decoders for direct translation across modalities. By factorizing interactions through the shared latent, FlowBind naturally leverages arbitrary subsets of modalities for training, and achieves competitive generation quality while substantially reducing data requirements and computational cost. Experiments on text, image, and audio demonstrate that FlowBind attains comparable quality while requiring up to 6x fewer parameters and training 10x faster than prior methods. The project page with code is available at https://yeonwoo378.github.io/official_flowbind.
Flock: A Knowledge Graph Foundation Model via Learning on Random Walks
Oct 01, 2025We study the problem of zero-shot link prediction on knowledge graphs (KGs), which requires models to generalize over novel entities and novel relations. Knowledge graph foundation models (KGFMs) address this task by enforcing equivariance over both nodes and relations, learning from structural properties of nodes and relations, which are then transferable to novel graphs with similar structural properties. However, the conventional notion of deterministic equivariance imposes inherent limits on the expressive power of KGFMs, preventing them from distinguishing structurally similar but semantically distinct relations. To overcome this limitation, we introduce probabilistic node-relation equivariance, which preserves equivariance in distribution while incorporating a principled randomization to break symmetries during inference. Building on this principle, we present Flock, a KGFM that iteratively samples random walks, encodes them into sequences via a recording protocol, embeds them with a sequence model, and aggregates representations of nodes and relations via learned pooling. Crucially, Flock respects probabilistic node-relation equivariance and is a universal approximator for isomorphism-invariant link-level functions over KGs. Empirically, Flock perfectly solves our new diagnostic dataset Petals where current KGFMs fail, and achieves state-of-the-art performances on entity- and relation prediction tasks on 54 KGs from diverse domains.
Universal Few-Shot Spatial Control for Diffusion Models
Sep 09, 2025



Spatial conditioning in pretrained text-to-image diffusion models has significantly improved fine-grained control over the structure of generated images. However, existing control adapters exhibit limited adaptability and incur high training costs when encountering novel spatial control conditions that differ substantially from the training tasks. To address this limitation, we propose Universal Few-Shot Control (UFC), a versatile few-shot control adapter capable of generalizing to novel spatial conditions. Given a few image-condition pairs of an unseen task and a query condition, UFC leverages the analogy between query and support conditions to construct task-specific control features, instantiated by a matching mechanism and an update on a small set of task-specific parameters. Experiments on six novel spatial control tasks show that UFC, fine-tuned with only 30 annotated examples of novel tasks, achieves fine-grained control consistent with the spatial conditions. Notably, when fine-tuned with 0.1% of the full training data, UFC achieves competitive performance with the fully supervised baselines in various control tasks. We also show that UFC is applicable agnostically to various diffusion backbones and demonstrate its effectiveness on both UNet and DiT architectures. Code is available at https://github.com/kietngt00/UFC.
HyperFlow: Gradient-Free Emulation of Few-Shot Fine-Tuning
Apr 21, 2025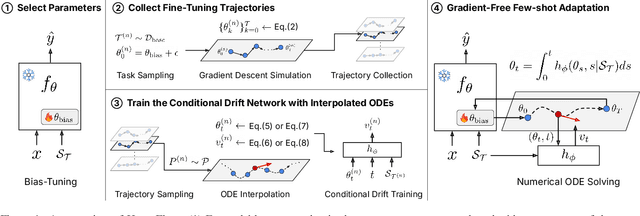



While test-time fine-tuning is beneficial in few-shot learning, the need for multiple backpropagation steps can be prohibitively expensive in real-time or low-resource scenarios. To address this limitation, we propose an approach that emulates gradient descent without computing gradients, enabling efficient test-time adaptation. Specifically, we formulate gradient descent as an Euler discretization of an ordinary differential equation (ODE) and train an auxiliary network to predict the task-conditional drift using only the few-shot support set. The adaptation then reduces to a simple numerical integration (e.g., via the Euler method), which requires only a few forward passes of the auxiliary network -- no gradients or forward passes of the target model are needed. In experiments on cross-domain few-shot classification using the Meta-Dataset and CDFSL benchmarks, our method significantly improves out-of-domain performance over the non-fine-tuned baseline while incurring only 6\% of the memory cost and 0.02\% of the computation time of standard fine-tuning, thus establishing a practical middle ground between direct transfer and fully fine-tuned approaches.
AdaRank: Adaptive Rank Pruning for Enhanced Model Merging
Mar 28, 2025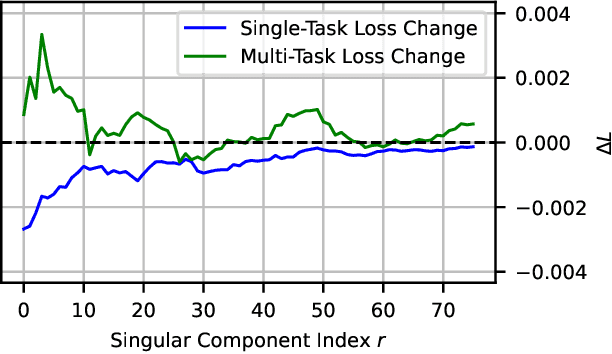
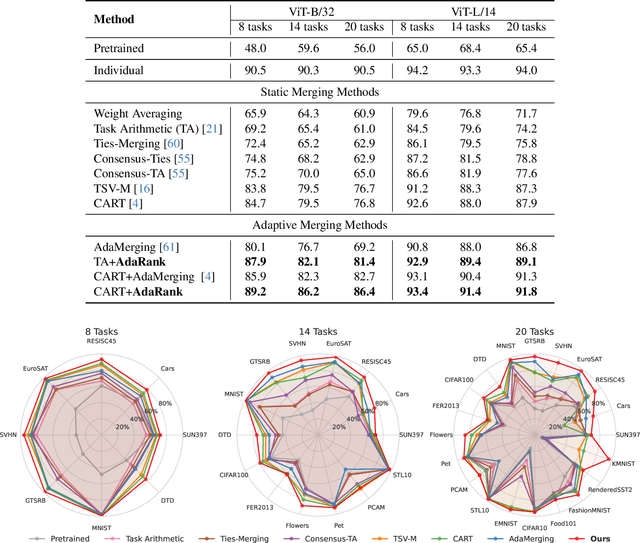
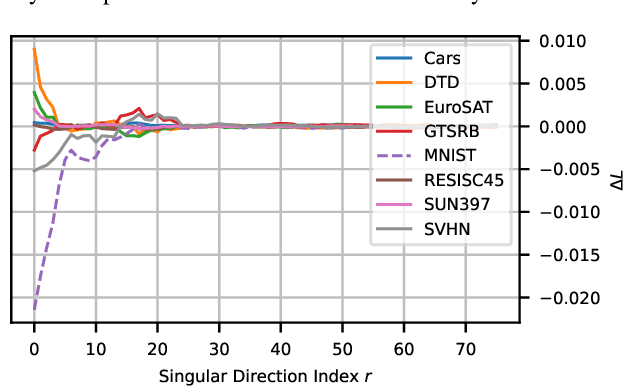
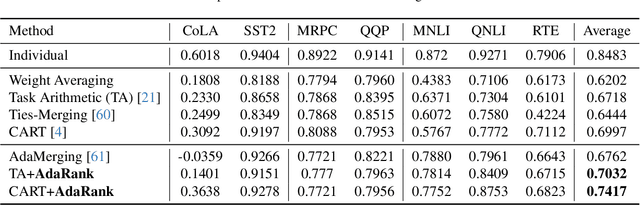
Model merging has emerged as a promising approach for unifying independently fine-tuned models into an integrated framework, significantly enhancing computational efficiency in multi-task learning. Recently, several SVD-based techniques have been introduced to exploit low-rank structures for enhanced merging, but their reliance on such manually designed rank selection often leads to cross-task interference and suboptimal performance. In this paper, we propose AdaRank, a novel model merging framework that adaptively selects the most beneficial singular directions of task vectors to merge multiple models. We empirically show that the dominant singular components of task vectors can cause critical interference with other tasks, and that naive truncation across tasks and layers degrades performance. In contrast, AdaRank dynamically prunes the singular components that cause interference and offers an optimal amount of information to each task vector by learning to prune ranks during test-time via entropy minimization. Our analysis demonstrates that such method mitigates detrimental overlaps among tasks, while empirical results show that AdaRank consistently achieves state-of-the-art performance with various backbones and number of tasks, reducing the performance gap between fine-tuned models to nearly 1%.
Learning to Merge Tokens via Decoupled Embedding for Efficient Vision Transformers
Dec 13, 2024



Recent token reduction methods for Vision Transformers (ViTs) incorporate token merging, which measures the similarities between token embeddings and combines the most similar pairs. However, their merging policies are directly dependent on intermediate features in ViTs, which prevents exploiting features tailored for merging and requires end-to-end training to improve token merging. In this paper, we propose Decoupled Token Embedding for Merging (DTEM) that enhances token merging through a decoupled embedding learned via a continuously relaxed token merging process. Our method introduces a lightweight embedding module decoupled from the ViT forward pass to extract dedicated features for token merging, thereby addressing the restriction from using intermediate features. The continuously relaxed token merging, applied during training, enables us to learn the decoupled embeddings in a differentiable manner. Thanks to the decoupled structure, our method can be seamlessly integrated into existing ViT backbones and trained either modularly by learning only the decoupled embeddings or end-to-end by fine-tuning. We demonstrate the applicability of DTEM on various tasks, including classification, captioning, and segmentation, with consistent improvement in token merging. Especially in the ImageNet-1k classification, DTEM achieves a 37.2% reduction in FLOPs while maintaining a top-1 accuracy of 79.85% with DeiT-small. Code is available at \href{https://github.com/movinghoon/dtem}{link}.
Revisiting Weight Averaging for Model Merging
Dec 11, 2024Model merging aims to build a multi-task learner by combining the parameters of individually fine-tuned models without additional training. While a straightforward approach is to average model parameters across tasks, this often results in suboptimal performance due to interference among parameters across tasks. In this paper, we present intriguing results that weight averaging implicitly induces task vectors centered around the weight averaging itself and that applying a low-rank approximation to these centered task vectors significantly improves merging performance. Our analysis shows that centering the task vectors effectively separates core task-specific knowledge and nuisance noise within the fine-tuned parameters into the top and lower singular vectors, respectively, allowing us to reduce inter-task interference through its low-rank approximation. We evaluate our method on eight image classification tasks, demonstrating that it outperforms prior methods by a significant margin, narrowing the performance gap with traditional multi-task learning to within 1-3%
Meta-Controller: Few-Shot Imitation of Unseen Embodiments and Tasks in Continuous Control
Dec 10, 2024



Generalizing across robot embodiments and tasks is crucial for adaptive robotic systems. Modular policy learning approaches adapt to new embodiments but are limited to specific tasks, while few-shot imitation learning (IL) approaches often focus on a single embodiment. In this paper, we introduce a few-shot behavior cloning framework to simultaneously generalize to unseen embodiments and tasks using a few (\emph{e.g.,} five) reward-free demonstrations. Our framework leverages a joint-level input-output representation to unify the state and action spaces of heterogeneous embodiments and employs a novel structure-motion state encoder that is parameterized to capture both shared knowledge across all embodiments and embodiment-specific knowledge. A matching-based policy network then predicts actions from a few demonstrations, producing an adaptive policy that is robust to over-fitting. Evaluated in the DeepMind Control suite, our framework termed \modelname{} demonstrates superior few-shot generalization to unseen embodiments and tasks over modular policy learning and few-shot IL approaches. Codes are available at \href{https://github.com/SeongwoongCho/meta-controller}{https://github.com/SeongwoongCho/meta-controller}.