 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraph-based Online Monitoring of Train Driver States via Facial and Skeletal Features
May 09, 2025Driver fatigue poses a significant challenge to railway safety, with traditional systems like the dead-man switch offering limited and basic alertness checks. This study presents an online behavior-based monitoring system utilizing a customised Directed-Graph Neural Network (DGNN) to classify train driver's states into three categories: alert, not alert, and pathological. To optimize input representations for the model, an ablation study was performed, comparing three feature configurations: skeletal-only, facial-only, and a combination of both. Experimental results show that combining facial and skeletal features yields the highest accuracy (80.88%) in the three-class model, outperforming models using only facial or skeletal features. Furthermore, this combination achieves over 99% accuracy in the binary alertness classification. Additionally, we introduced a novel dataset that, for the first time, incorporates simulated pathological conditions into train driver monitoring, broadening the scope for assessing risks related to fatigue and health. This work represents a step forward in enhancing railway safety through advanced online monitoring using vision-based technologies.
WiFi based Human Fall and Activity Recognition using Transformer based Encoder Decoder and Graph Neural Networks
Apr 23, 2025Human pose estimation and action recognition have received attention due to their critical roles in healthcare monitoring, rehabilitation, and assistive technologies. In this study, we proposed a novel architecture named Transformer based Encoder Decoder Network (TED Net) designed for estimating human skeleton poses from WiFi Channel State Information (CSI). TED Net integrates convolutional encoders with transformer based attention mechanisms to capture spatiotemporal features from CSI signals. The estimated skeleton poses were used as input to a customized Directed Graph Neural Network (DGNN) for action recognition. We validated our model on two datasets: a publicly available multi modal dataset for assessing general pose estimation, and a newly collected dataset focused on fall related scenarios involving 20 participants. Experimental results demonstrated that TED Net outperformed existing approaches in pose estimation, and that the DGNN achieves reliable action classification using CSI based skeletons, with performance comparable to RGB based systems. Notably, TED Net maintains robust performance across both fall and non fall cases. These findings highlight the potential of CSI driven human skeleton estimation for effective action recognition, particularly in home environments such as elderly fall detection. In such settings, WiFi signals are often readily available, offering a privacy preserving alternative to vision based methods, which may raise concerns about continuous camera monitoring.
Feature Augmentation based Test-Time Adaptation
Oct 18, 2024Test-time adaptation (TTA) allows a model to be adapted to an unseen domain without accessing the source data. Due to the nature of practical environments, TTA has a limited amount of data for adaptation. Recent TTA methods further restrict this by filtering input data for reliability, making the effective data size even smaller and limiting adaptation potential. To address this issue, We propose Feature Augmentation based Test-time Adaptation (FATA), a simple method that fully utilizes the limited amount of input data through feature augmentation. FATA employs Normalization Perturbation to augment features and adapts the model using the FATA loss, which makes the outputs of the augmented and original features similar. FATA is model-agnostic and can be seamlessly integrated into existing models without altering the model architecture. We demonstrate the effectiveness of FATA on various models and scenarios on ImageNet-C and Office-Home, validating its superiority in diverse real-world conditions.
Beyond Entropy: Style Transfer Guided Single Image Continual Test-Time Adaptation
Nov 30, 2023



Continual test-time adaptation (cTTA) methods are designed to facilitate the continual adaptation of models to dynamically changing real-world environments where computational resources are limited. Due to this inherent limitation, existing approaches fail to simultaneously achieve accuracy and efficiency. In detail, when using a single image, the instability caused by batch normalization layers and entropy loss significantly destabilizes many existing methods in real-world cTTA scenarios. To overcome these challenges, we present BESTTA, a novel single image continual test-time adaptation method guided by style transfer, which enables stable and efficient adaptation to the target environment by transferring the style of the input image to the source style. To implement the proposed method, we devise BeIN, a simple yet powerful normalization method, along with the style-guided losses. We demonstrate that BESTTA effectively adapts to the continually changing target environment, leveraging only a single image on both semantic segmentation and image classification tasks. Remarkably, despite training only two parameters in a BeIN layer consuming the least memory, BESTTA outperforms existing state-of-the-art methods in terms of performance.
MetaWeather: Few-Shot Weather-Degraded Image Restoration via Degradation Pattern Matching
Sep 05, 2023Real-world vision tasks frequently suffer from the appearance of adverse weather conditions including rain, fog, snow, and raindrops in captured images. Recently, several generic methods for restoring weather-degraded images have been proposed, aiming to remove multiple types of adverse weather effects present in the images. However, these methods have considered weather as discrete and mutually exclusive variables, leading to failure in generalizing to unforeseen weather conditions beyond the scope of the training data, such as the co-occurrence of rain, fog, and raindrops. To this end, weather-degraded image restoration models should have flexible adaptability to the current unknown weather condition to ensure reliable and optimal performance. The adaptation method should also be able to cope with data scarcity for real-world adaptation. This paper proposes MetaWeather, a few-shot weather-degraded image restoration method for arbitrary weather conditions. For this, we devise the core piece of MetaWeather, coined Degradation Pattern Matching Module (DPMM), which leverages representations from a few-shot support set by matching features between input and sample images under new weather conditions. In addition, we build meta-knowledge with episodic meta-learning on top of our MetaWeather architecture to provide flexible adaptability. In the meta-testing phase, we adopt a parameter-efficient fine-tuning method to preserve the prebuilt knowledge and avoid the overfitting problem. Experiments on the BID Task II.A dataset show our method achieves the best performance on PSNR and SSIM compared to state-of-the-art image restoration methods. Code is available at (TBA).
Generative Model-based Simulation of Driver Behavior when Using Control Input Interface for Teleoperated Driving in Unstructured Canyon Terrains
May 17, 2023


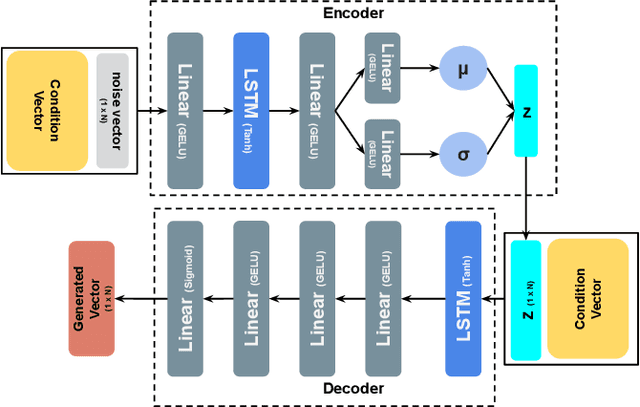
Unmanned ground vehicles (UGVs) in unstructured environments mostly operate through teleoperation. To enable stable teleoperated driving in unstructured environments, some research has suggested driver assistance and evaluation methods that involve user studies, which can be costly and require lots of time and effort. A simulation model-based approach has been proposed to complement the user study; however, the models on teleoperated driving do not account for unstructured environments. Our proposed solution involves simulation models of teleoperated driving for drivers that utilize a deep generative model. Initially, we build a teleoperated driving simulator to imitate unstructured environments based on previous research and collect driving data from drivers. Then, we design and implement the simulation models based on a conditional variational autoencoder (CVAE). Our evaluation results demonstrate that the proposed teleoperated driving model can generate data by simulating the driver appropriately in unstructured canyon terrains.
GoonDAE: Denoising-Based Driver Assistance for Off-Road Teleoperation
Sep 08, 2022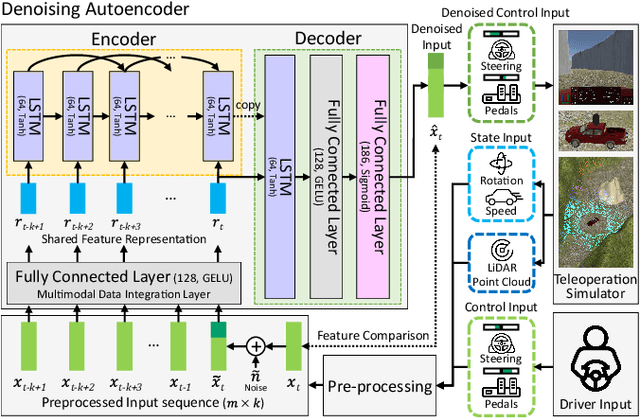
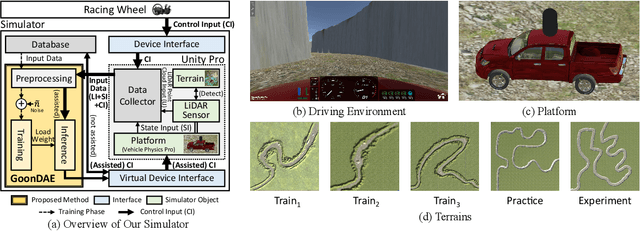
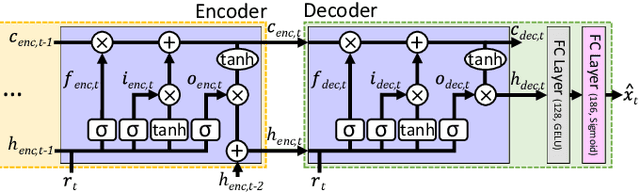

Because of the limitations of autonomous driving technologies, teleoperation is widely used in dangerous environments such as military operations. However, the teleoperated driving performance depends considerably on the driver's skill level. Moreover, unskilled drivers need extensive training time for teleoperations in unusual and harsh environments. To address this problem, we propose a novel denoising-based driver assistance method, namely GoonDAE, for real-time teleoperated off-road driving. The unskilled driver control input is assumed to be the same as the skilled driver control input but with noise. We designed a skip-connected long short-term memory (LSTM)-based denoising autoencoder (DAE) model to assist the unskilled driver control input by denoising. The proposed GoonDAE was trained with skilled driver control input and sensor data collected from our simulated off-road driving environment. To evaluate GoonDAE, we conducted an experiment with unskilled drivers in the simulated environment. The results revealed that the proposed system considerably enhanced driving performance in terms of driving stability.