 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerative Model-based Simulation of Driver Behavior when Using Control Input Interface for Teleoperated Driving in Unstructured Canyon Terrains
May 17, 2023


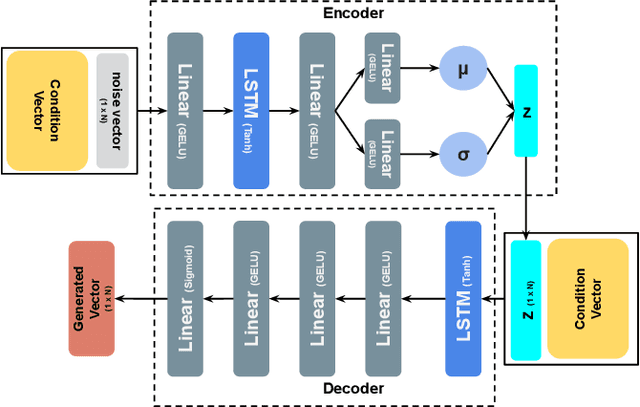
Unmanned ground vehicles (UGVs) in unstructured environments mostly operate through teleoperation. To enable stable teleoperated driving in unstructured environments, some research has suggested driver assistance and evaluation methods that involve user studies, which can be costly and require lots of time and effort. A simulation model-based approach has been proposed to complement the user study; however, the models on teleoperated driving do not account for unstructured environments. Our proposed solution involves simulation models of teleoperated driving for drivers that utilize a deep generative model. Initially, we build a teleoperated driving simulator to imitate unstructured environments based on previous research and collect driving data from drivers. Then, we design and implement the simulation models based on a conditional variational autoencoder (CVAE). Our evaluation results demonstrate that the proposed teleoperated driving model can generate data by simulating the driver appropriately in unstructured canyon terrains.
GoonDAE: Denoising-Based Driver Assistance for Off-Road Teleoperation
Sep 08, 2022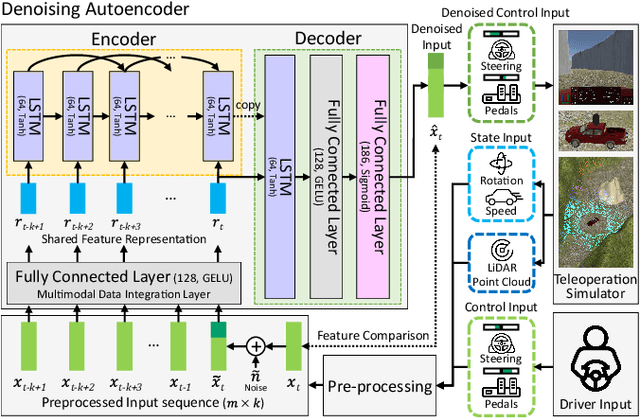
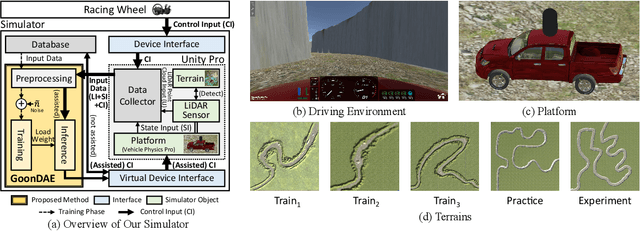
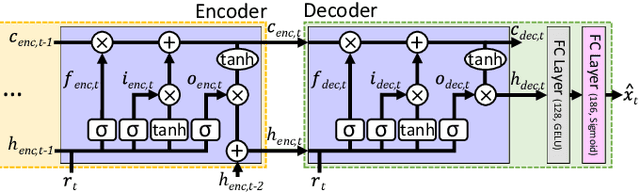

Because of the limitations of autonomous driving technologies, teleoperation is widely used in dangerous environments such as military operations. However, the teleoperated driving performance depends considerably on the driver's skill level. Moreover, unskilled drivers need extensive training time for teleoperations in unusual and harsh environments. To address this problem, we propose a novel denoising-based driver assistance method, namely GoonDAE, for real-time teleoperated off-road driving. The unskilled driver control input is assumed to be the same as the skilled driver control input but with noise. We designed a skip-connected long short-term memory (LSTM)-based denoising autoencoder (DAE) model to assist the unskilled driver control input by denoising. The proposed GoonDAE was trained with skilled driver control input and sensor data collected from our simulated off-road driving environment. To evaluate GoonDAE, we conducted an experiment with unskilled drivers in the simulated environment. The results revealed that the proposed system considerably enhanced driving performance in terms of driving stability.