 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Feasibility of EEG-based Motor Intention Detection for Real-Time Robot Assistive Control
Mar 13, 2024



This paper explores the feasibility of employing EEG-based intention detection for real-time robot assistive control. We focus on predicting and distinguishing motor intentions of left/right arm movements by presenting: i) an offline data collection and training pipeline, used to train a classifier for left/right motion intention prediction, and ii) an online real-time prediction pipeline leveraging the trained classifier and integrated with an assistive robot. Central to our approach is a rich feature representation composed of the tangent space projection of time-windowed sample covariance matrices from EEG filtered signals and derivatives; allowing for a simple SVM classifier to achieve unprecedented accuracy and real-time performance. In pre-recorded real-time settings (160 Hz), a peak accuracy of 86.88% is achieved, surpassing prior works. In robot-in-the-loop settings, our system successfully detects intended motion solely from EEG data with 70% accuracy, triggering a robot to execute an assistive task. We provide a comprehensive evaluation of the proposed classifier.
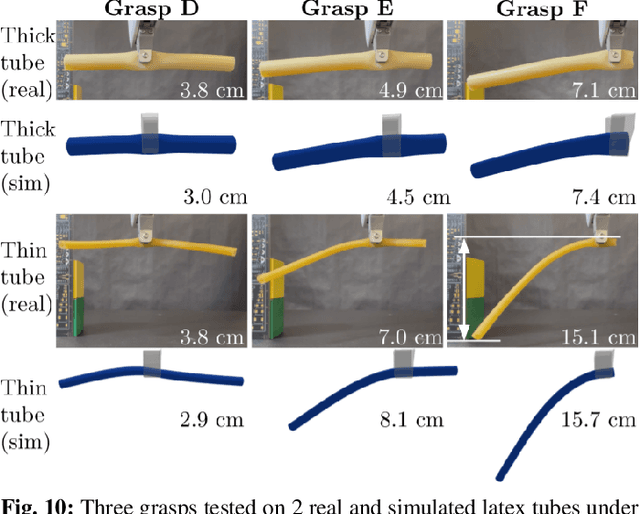
DefGraspNets: Grasp Planning on 3D Fields with Graph Neural Nets
Mar 28, 2023
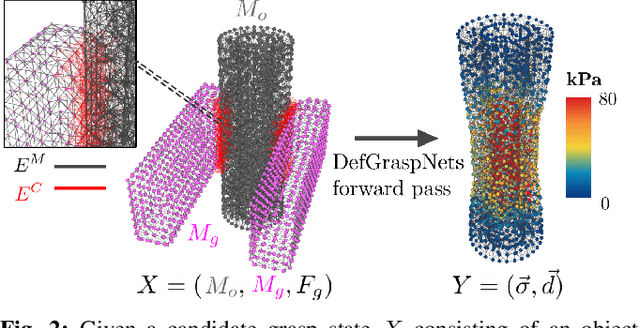


Robotic grasping of 3D deformable objects is critical for real-world applications such as food handling and robotic surgery. Unlike rigid and articulated objects, 3D deformable objects have infinite degrees of freedom. Fully defining their state requires 3D deformation and stress fields, which are exceptionally difficult to analytically compute or experimentally measure. Thus, evaluating grasp candidates for grasp planning typically requires accurate, but slow 3D finite element method (FEM) simulation. Sampling-based grasp planning is often impractical, as it requires evaluation of a large number of grasp candidates. Gradient-based grasp planning can be more efficient, but requires a differentiable model to synthesize optimal grasps from initial candidates. Differentiable FEM simulators may fill this role, but are typically no faster than standard FEM. In this work, we propose learning a predictive graph neural network (GNN), DefGraspNets, to act as our differentiable model. We train DefGraspNets to predict 3D stress and deformation fields based on FEM-based grasp simulations. DefGraspNets not only runs up to 1500 times faster than the FEM simulator, but also enables fast gradient-based grasp optimization over 3D stress and deformation metrics. We design DefGraspNets to align with real-world grasp planning practices and demonstrate generalization across multiple test sets, including real-world experiments.
DefGraspSim: Physics-based simulation of grasp outcomes for 3D deformable objects
Mar 21, 2022


Robotic grasping of 3D deformable objects (e.g., fruits/vegetables, internal organs, bottles/boxes) is critical for real-world applications such as food processing, robotic surgery, and household automation. However, developing grasp strategies for such objects is uniquely challenging. Unlike rigid objects, deformable objects have infinite degrees of freedom and require field quantities (e.g., deformation, stress) to fully define their state. As these quantities are not easily accessible in the real world, we propose studying interaction with deformable objects through physics-based simulation. As such, we simulate grasps on a wide range of 3D deformable objects using a GPU-based implementation of the corotational finite element method (FEM). To facilitate future research, we open-source our simulated dataset (34 objects, 1e5 Pa elasticity range, 6800 grasp evaluations, 1.1M grasp measurements), as well as a code repository that allows researchers to run our full FEM-based grasp evaluation pipeline on arbitrary 3D object models of their choice. Finally, we demonstrate good correspondence between grasp outcomes on simulated objects and their real counterparts.
Deformable Elasto-Plastic Object Shaping using an Elastic Hand and Model-Based Reinforcement Learning
Jul 14, 2021



Deformable solid objects such as clay or dough are prevalent in industrial and home environments. However, robotic manipulation of such objects has largely remained unexplored in literature due to the high complexity involved in representing and modeling their deformation. This work addresses the problem of shaping elasto-plastic dough by proposing to use a novel elastic end-effector to roll dough in a reinforcement learning framework. The transition model for the end-effector-to-dough interactions is learned from one hour of robot exploration, and doughs of different hydration levels are rolled out into varying lengths. Experimental results are encouraging, with the proposed framework accomplishing the task of rolling out dough into a specified length with 60% fewer actions than a heuristic method. Furthermore, we show that estimating stiffness using the soft end-effector can be used to effectively initialize models, improving robot performance by approximately 40% over incorrect model initialization.
StRETcH: a Soft to Resistive Elastic Tactile Hand
May 17, 2021



Soft optical tactile sensors enable robots to manipulate deformable objects by capturing important features such as high-resolution contact geometry and estimations of object compliance. This work presents a variable stiffness soft tactile end-effector called StRETcH, a Soft to Resistive Elastic Tactile Hand, that is easily manufactured and integrated with a robotic arm. An elastic membrane is suspended between two robotic fingers, and a depth sensor capturing the deformations of the elastic membrane enables sub-millimeter accurate estimates of contact geometries. The parallel-jaw gripper varies the stiffness of the membrane by uni-axially stretching it, which controllably modulates StRETcH's effective modulus from approximately 4kPa to 9kPa. This work uses StRETcH to reconstruct the contact geometry of rigid and deformable objects, estimate the stiffness of four balloons filled with different substances, and manipulate dough into a desired shape.
STReSSD: Sim-To-Real from Sound for Stochastic Dynamics
Nov 05, 2020



Sound is an information-rich medium that captures dynamic physical events. This work presents STReSSD, a framework that uses sound to bridge the simulation-to-reality gap for stochastic dynamics, demonstrated for the canonical case of a bouncing ball. A physically-motivated noise model is presented to capture stochastic behavior of the balls upon collision with the environment. A likelihood-free Bayesian inference framework is used to infer the parameters of the noise model, as well as a material property called the coefficient of restitution, from audio observations. The same inference framework and the calibrated stochastic simulator are then used to learn a probabilistic model of ball dynamics. The predictive capabilities of the dynamics model are tested in two robotic experiments. First, open-loop predictions anticipate probabilistic success of bouncing a ball into a cup. The second experiment integrates audio perception with a robotic arm to track and deflect a bouncing ball in real-time. We envision that this work is a step towards integrating audio-based inference for dynamic robotic tasks. Experimental results can be viewed at https://youtu.be/b7pOrgZrArk.
Inferring the Material Properties of Granular Media for Robotic Tasks
Mar 19, 2020



Granular media (e.g., cereal grains, plastic resin pellets, and pills) are ubiquitous in robotics-integrated industries, such as agriculture, manufacturing, and pharmaceutical development. This prevalence mandates the accurate and efficient simulation of these materials. This work presents a software and hardware framework that automatically calibrates a fast physics simulator to accurately simulate granular materials by inferring material properties from real-world depth images of granular formations (i.e., piles and rings). Specifically, coefficients of sliding friction, rolling friction, and restitution of grains are estimated from summary statistics of grain formations using likelihood-free Bayesian inference. The calibrated simulator accurately predicts unseen granular formations in both simulation and experiment; furthermore, simulator predictions are shown to generalize to more complex tasks, including using a robot to pour grains into a bowl, as well as to create a desired pattern of piles and rings. Visualizations of the framework and experiments can be viewed at https://www.youtube.com/watch?v=X-5Sk2TUET4.
Fast forwarding Egocentric Videos by Listening and Watching
Jun 12, 2018


The remarkable technological advance in well-equipped wearable devices is pushing an increasing production of long first-person videos. However, since most of these videos have long and tedious parts, they are forgotten or never seen. Despite a large number of techniques proposed to fast-forward these videos by highlighting relevant moments, most of them are image based only. Most of these techniques disregard other relevant sensors present in the current devices such as high-definition microphones. In this work, we propose a new approach to fast-forward videos using psychoacoustic metrics extracted from the soundtrack. These metrics can be used to estimate the annoyance of a segment allowing our method to emphasize moments of sound pleasantness. The efficiency of our method is demonstrated through qualitative results and quantitative results as far as of speed-up and instability are concerned.
A Computer Vision Pipeline for Automated Determination of Cardiac Structure and Function and Detection of Disease by Two-Dimensional Echocardiography
Jan 12, 2018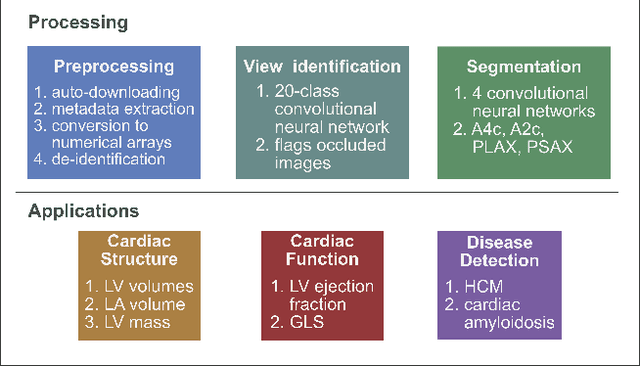
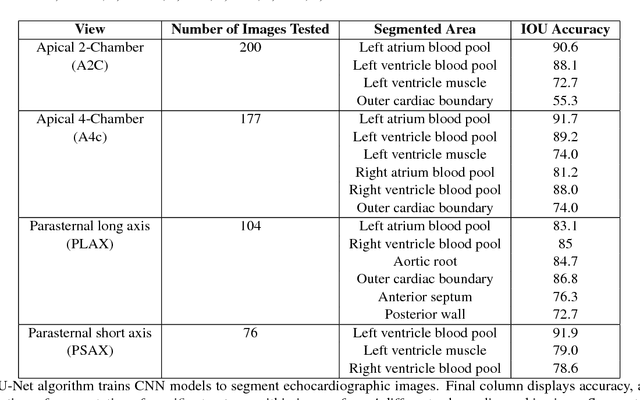
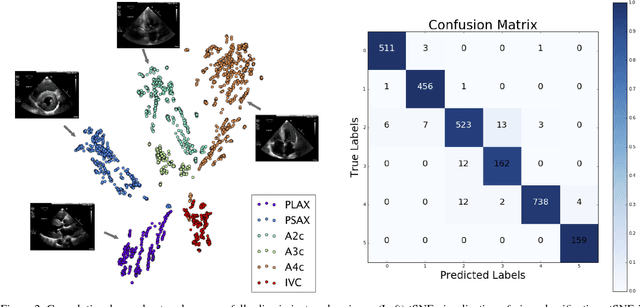
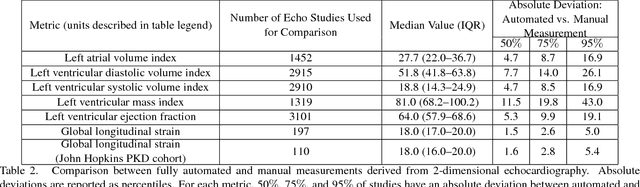
Automated cardiac image interpretation has the potential to transform clinical practice in multiple ways including enabling low-cost serial assessment of cardiac function in the primary care and rural setting. We hypothesized that advances in computer vision could enable building a fully automated, scalable analysis pipeline for echocardiogram (echo) interpretation. Our approach entailed: 1) preprocessing; 2) convolutional neural networks (CNN) for view identification, image segmentation, and phasing of the cardiac cycle; 3) quantification of chamber volumes and left ventricular mass; 4) particle tracking to compute longitudinal strain; and 5) targeted disease detection. CNNs accurately identified views (e.g. 99% for apical 4-chamber) and segmented individual cardiac chambers. Cardiac structure measurements agreed with study report values (e.g. mean absolute deviations (MAD) of 7.7 mL/kg/m2 for left ventricular diastolic volume index, 2918 studies). We computed automated ejection fraction and longitudinal strain measurements (within 2 cohorts), which agreed with commercial software-derived values [for ejection fraction, MAD=5.3%, N=3101 studies; for strain, MAD=1.5% (n=197) and 1.6% (n=110)], and demonstrated applicability to serial monitoring of breast cancer patients for trastuzumab cardiotoxicity. Overall, we found that, compared to manual measurements, automated measurements had superior performance across seven internal consistency metrics with an average increase in the Spearman correlation coefficient of 0.05 (p=0.02). Finally, we developed disease detection algorithms for hypertrophic cardiomyopathy and cardiac amyloidosis, with C-statistics of 0.93 and 0.84, respectively. Our pipeline lays the groundwork for using automated interpretation to support point-of-care handheld cardiac ultrasound and large-scale analysis of the millions of echos archived within healthcare systems.
Convex Computation of the Basin of Stability to Measure the Likelihood of Falling: A Case Study on the Sit-to-Stand Task
Apr 03, 2016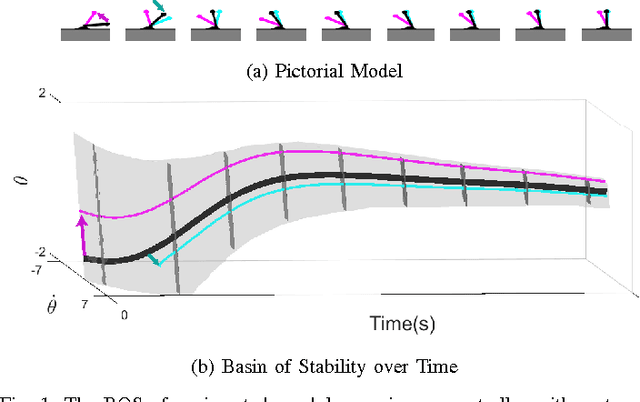
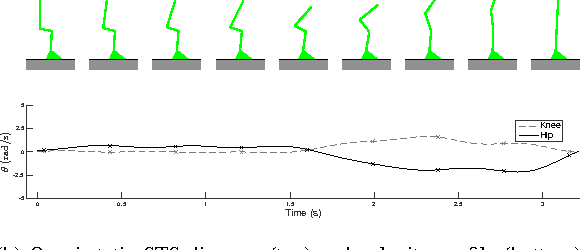
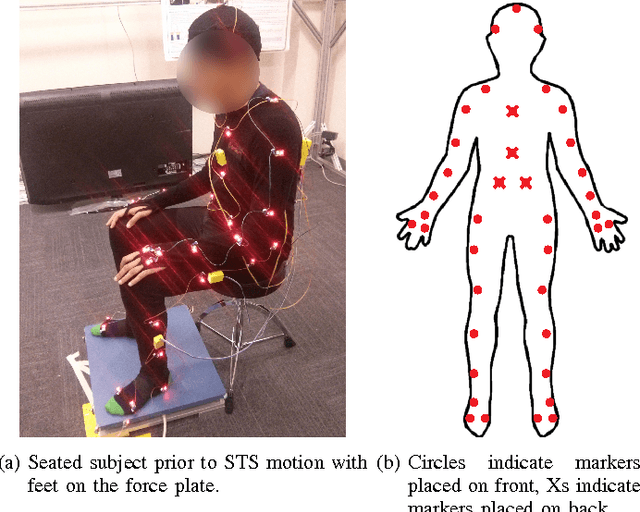
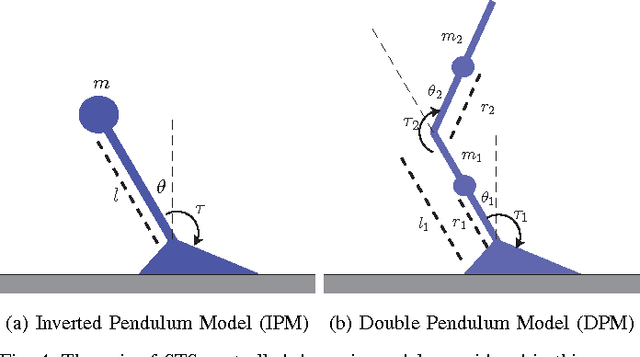
Locomotion in the real world involves unexpected perturbations, and therefore requires strategies to maintain stability to successfully execute desired behaviours. Ensuring the safety of locomoting systems therefore necessitates a quantitative metric for stability. Due to the difficulty of determining the set of perturbations that induce failure, researchers have used a variety of features as a proxy to describe stability. This paper utilises recent advances in dynamical systems theory to develop a personalised, automated framework to compute the set of perturbations from which a system can avoid failure, which is known as the basin of stability. The approach tracks human motion to synthesise a control input that is analysed to measure the basin of stability. The utility of this analysis is verified on a Sit-to-Stand task performed by 15 individuals. The experiment illustrates that the computed basin of stability for each individual can successfully differentiate between less and more stable Sit-to-Stand strategies.