 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConvex Computation of the Basin of Stability to Measure the Likelihood of Falling: A Case Study on the Sit-to-Stand Task
Apr 03, 2016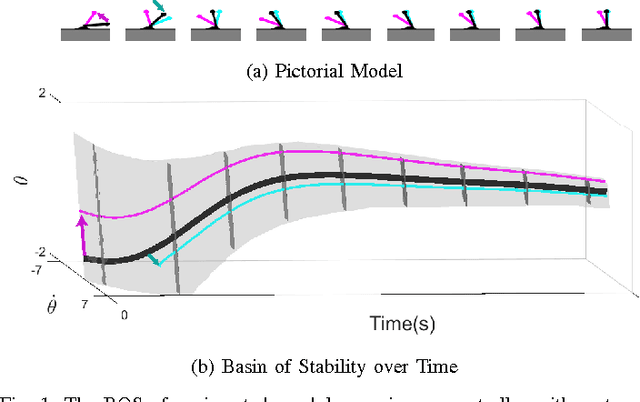
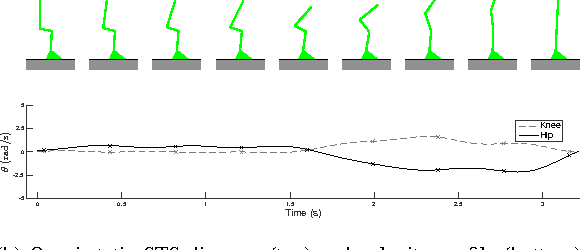
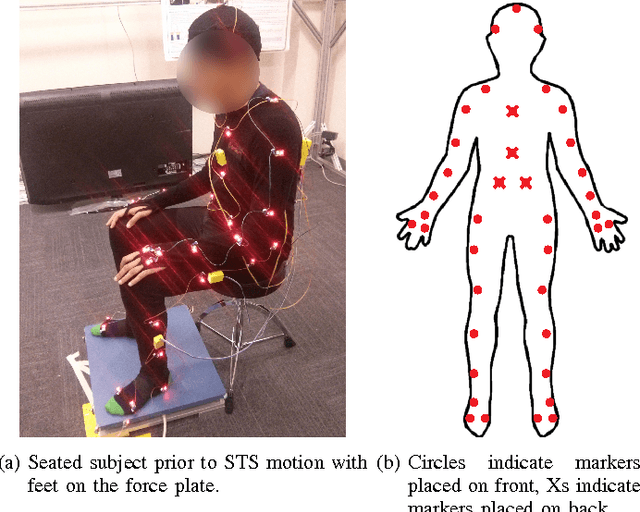
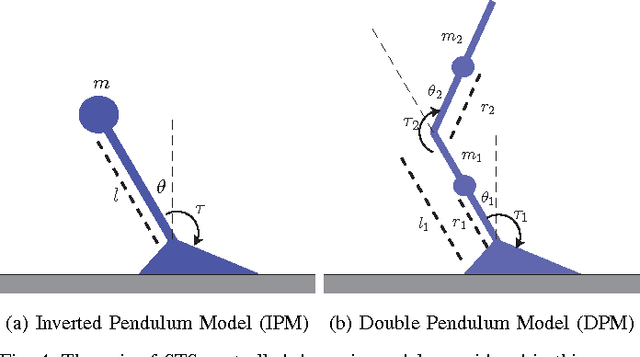
Locomotion in the real world involves unexpected perturbations, and therefore requires strategies to maintain stability to successfully execute desired behaviours. Ensuring the safety of locomoting systems therefore necessitates a quantitative metric for stability. Due to the difficulty of determining the set of perturbations that induce failure, researchers have used a variety of features as a proxy to describe stability. This paper utilises recent advances in dynamical systems theory to develop a personalised, automated framework to compute the set of perturbations from which a system can avoid failure, which is known as the basin of stability. The approach tracks human motion to synthesise a control input that is analysed to measure the basin of stability. The utility of this analysis is verified on a Sit-to-Stand task performed by 15 individuals. The experiment illustrates that the computed basin of stability for each individual can successfully differentiate between less and more stable Sit-to-Stand strategies.