 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeRF-VAE: A Geometry Aware 3D Scene Generative Model
Apr 01, 2021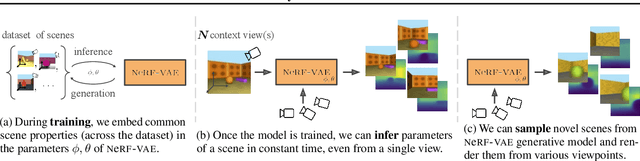
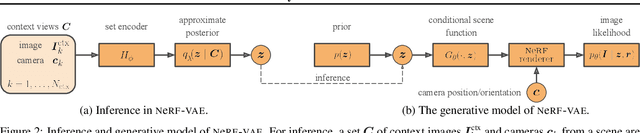
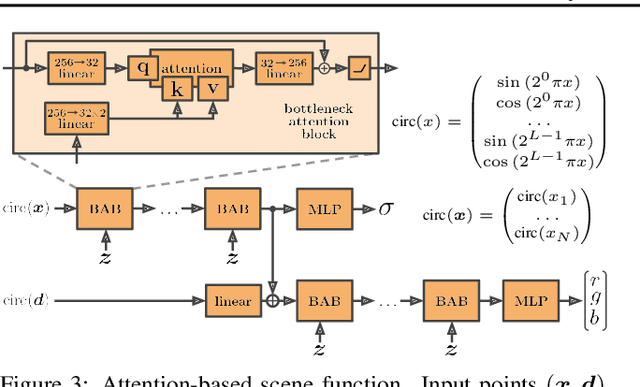
We propose NeRF-VAE, a 3D scene generative model that incorporates geometric structure via NeRF and differentiable volume rendering. In contrast to NeRF, our model takes into account shared structure across scenes, and is able to infer the structure of a novel scene -- without the need to re-train -- using amortized inference. NeRF-VAE's explicit 3D rendering process further contrasts previous generative models with convolution-based rendering which lacks geometric structure. Our model is a VAE that learns a distribution over radiance fields by conditioning them on a latent scene representation. We show that, once trained, NeRF-VAE is able to infer and render geometrically-consistent scenes from previously unseen 3D environments using very few input images. We further demonstrate that NeRF-VAE generalizes well to out-of-distribution cameras, while convolutional models do not. Finally, we introduce and study an attention-based conditioning mechanism of NeRF-VAE's decoder, which improves model performance.
Decoupling the Role of Data, Attention, and Losses in Multimodal Transformers
Jan 31, 2021


Recently multimodal transformer models have gained popularity because their performance on language and vision tasks suggest they learn rich visual-linguistic representations. Focusing on zero-shot image retrieval tasks, we study three important factors which can impact the quality of learned representations: pretraining data, the attention mechanism, and loss functions. By pretraining models on six datasets, we observe that dataset noise and language similarity to our downstream task are important indicators of model performance. Through architectural analysis, we learn that models with a multimodal attention mechanism can outperform deeper models with modality specific attention mechanisms. Finally, we show that successful contrastive losses used in the self-supervised learning literature do not yield similar performance gains when used in multimodal transformers
Self-Supervised MultiModal Versatile Networks
Jun 29, 2020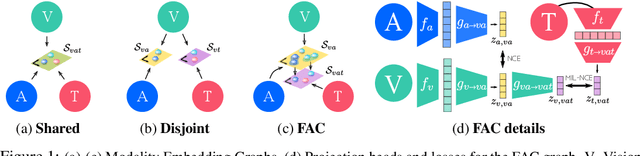
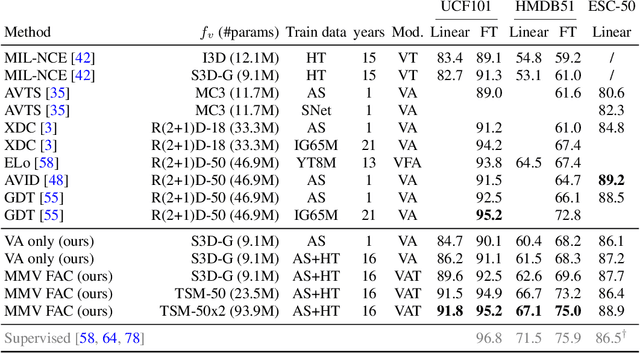
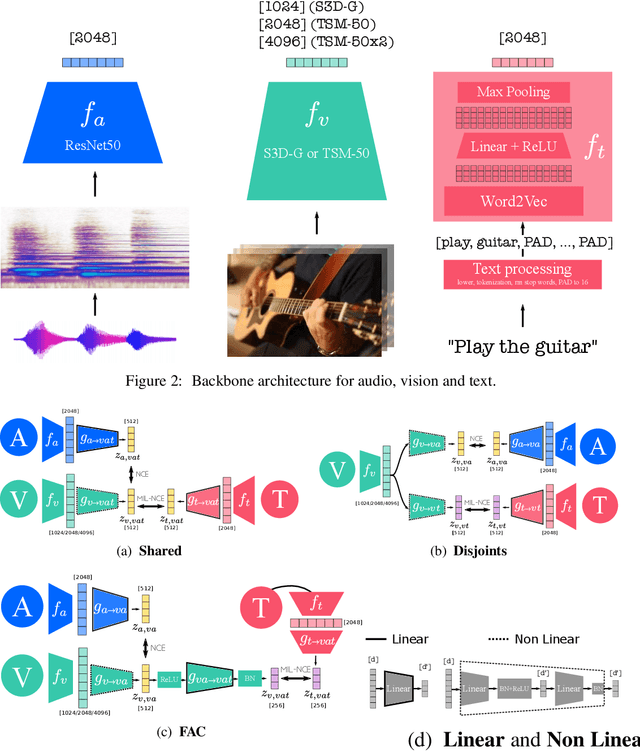
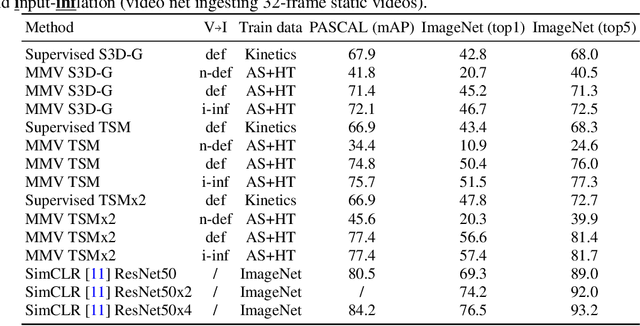
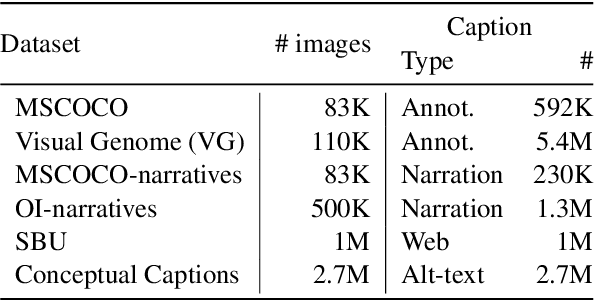
Videos are a rich source of multi-modal supervision. In this work, we learn representations using self-supervision by leveraging three modalities naturally present in videos: vision, audio and language. To this end, we introduce the notion of a multimodal versatile network -- a network that can ingest multiple modalities and whose representations enable downstream tasks in multiple modalities. In particular, we explore how best to combine the modalities, such that fine-grained representations of audio and vision can be maintained, whilst also integrating text into a common embedding. Driven by versatility, we also introduce a novel process of deflation, so that the networks can be effortlessly applied to the visual data in the form of video or a static image. We demonstrate how such networks trained on large collections of unlabelled video data can be applied on video, video-text, image and audio tasks. Equipped with these representations, we obtain state-of-the-art performance on multiple challenging benchmarks including UCF101, HMDB51 and ESC-50 when compared to previous self-supervised work.
Probing Emergent Semantics in Predictive Agents via Question Answering
Jun 01, 2020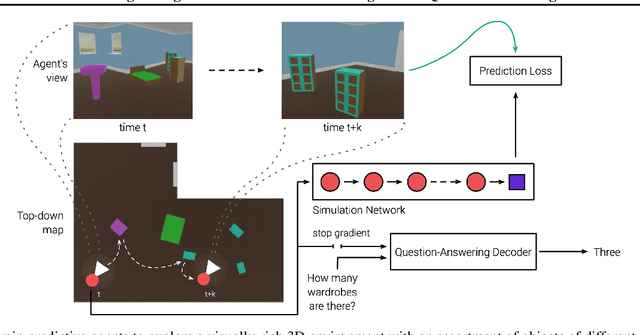
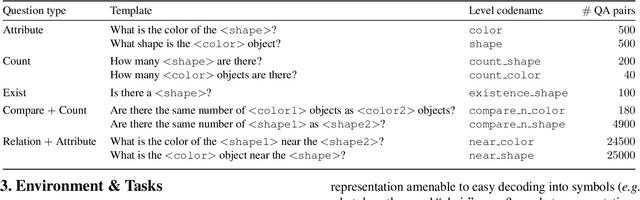
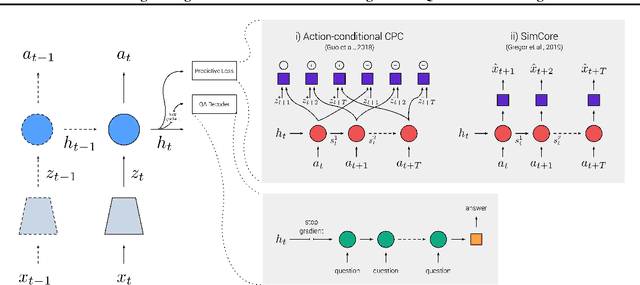
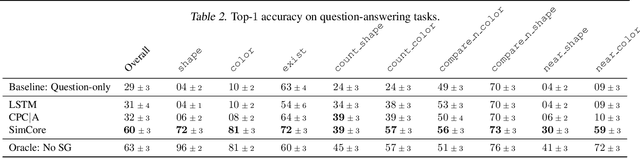
Recent work has shown how predictive modeling can endow agents with rich knowledge of their surroundings, improving their ability to act in complex environments. We propose question-answering as a general paradigm to decode and understand the representations that such agents develop, applying our method to two recent approaches to predictive modeling -action-conditional CPC (Guo et al., 2018) and SimCore (Gregor et al., 2019). After training agents with these predictive objectives in a visually-rich, 3D environment with an assortment of objects, colors, shapes, and spatial configurations, we probe their internal state representations with synthetic (English) questions, without backpropagating gradients from the question-answering decoder into the agent. The performance of different agents when probed this way reveals that they learn to encode factual, and seemingly compositional, information about objects, properties and spatial relations from their physical environment. Our approach is intuitive, i.e. humans can easily interpret responses of the model as opposed to inspecting continuous vectors, and model-agnostic, i.e. applicable to any modeling approach. By revealing the implicit knowledge of objects, quantities, properties and relations acquired by agents as they learn, question-conditional agent probing can stimulate the design and development of stronger predictive learning objectives.
Emergent Systematic Generalization in a Situated Agent
Oct 28, 2019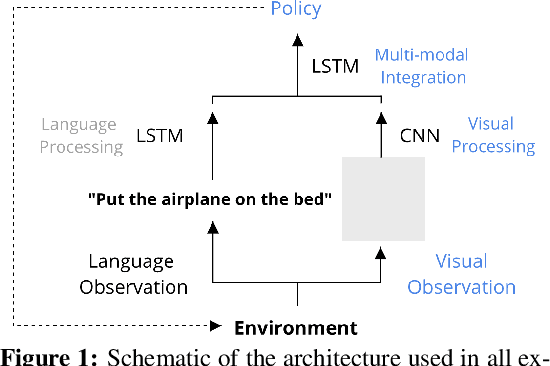
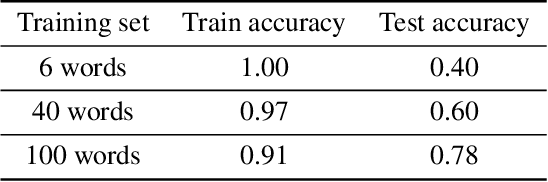
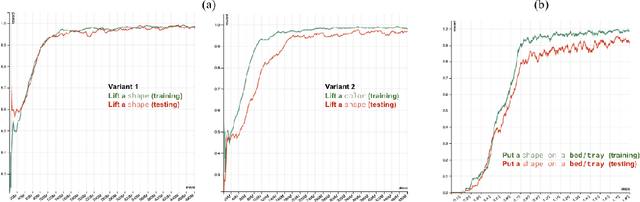
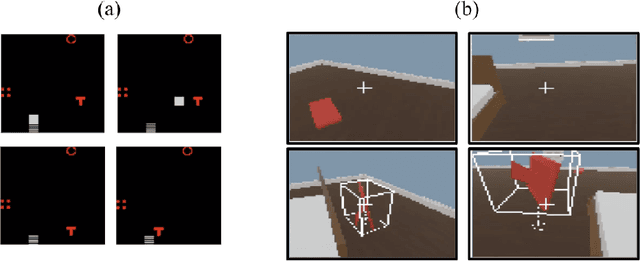
The question of whether deep neural networks are good at generalising beyond their immediate training experience is of critical importance for learning-based approaches to AI. Here, we demonstrate strong emergent systematic generalisation in a neural network agent and isolate the factors that support this ability. In environments ranging from a grid-world to a rich interactive 3D Unity room, we show that an agent can correctly exploit the compositional nature of a symbolic language to interpret never-seen-before instructions. We observe this capacity not only when instructions refer to object properties (colors and shapes) but also verb-like motor skills (lifting and putting) and abstract modifying operations (negation). We identify three factors that can contribute to this facility for systematic generalisation: (a) the number of object/word experiences in the training set; (b) the invariances afforded by a first-person, egocentric perspective; and (c) the variety of visual input experienced by an agent that perceives the world actively over time. Thus, while neural nets trained in idealised or reduced situations may fail to exhibit a compositional or systematic understanding of their experience, this competence can readily emerge when, like human learners, they have access to many examples of richly varying, multi-modal observations as they learn.