 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBabelBench: An Omni Benchmark for Code-Driven Analysis of Multimodal and Multistructured Data
Oct 01, 2024



Large language models (LLMs) have become increasingly pivotal across various domains, especially in handling complex data types. This includes structured data processing, as exemplified by ChartQA and ChatGPT-Ada, and multimodal unstructured data processing as seen in Visual Question Answering (VQA). These areas have attracted significant attention from both industry and academia. Despite this, there remains a lack of unified evaluation methodologies for these diverse data handling scenarios. In response, we introduce BabelBench, an innovative benchmark framework that evaluates the proficiency of LLMs in managing multimodal multistructured data with code execution. BabelBench incorporates a dataset comprising 247 meticulously curated problems that challenge the models with tasks in perception, commonsense reasoning, logical reasoning, and so on. Besides the basic capabilities of multimodal understanding, structured data processing as well as code generation, these tasks demand advanced capabilities in exploration, planning, reasoning and debugging. Our experimental findings on BabelBench indicate that even cutting-edge models like ChatGPT 4 exhibit substantial room for improvement. The insights derived from our comprehensive analysis offer valuable guidance for future research within the community. The benchmark data can be found at https://github.com/FFD8FFE/babelbench.
Multi-Agent Reinforcement Learning from Human Feedback: Data Coverage and Algorithmic Techniques
Sep 04, 2024



We initiate the study of Multi-Agent Reinforcement Learning from Human Feedback (MARLHF), exploring both theoretical foundations and empirical validations. We define the task as identifying Nash equilibrium from a preference-only offline dataset in general-sum games, a problem marked by the challenge of sparse feedback signals. Our theory establishes the upper complexity bounds for Nash Equilibrium in effective MARLHF, demonstrating that single-policy coverage is inadequate and highlighting the importance of unilateral dataset coverage. These theoretical insights are verified through comprehensive experiments. To enhance the practical performance, we further introduce two algorithmic techniques. (1) We propose a Mean Squared Error (MSE) regularization along the time axis to achieve a more uniform reward distribution and improve reward learning outcomes. (2) We utilize imitation learning to approximate the reference policy, ensuring stability and effectiveness in training. Our findings underscore the multifaceted approach required for MARLHF, paving the way for effective preference-based multi-agent systems.
$\mathbf{}$-Puzzle: A Cost-Efficient Testbed for Benchmarking Reinforcement Learning Algorithms in Generative Language Model
Mar 11, 2024



Recent advances in reinforcement learning (RL) algorithms aim to enhance the performance of language models at scale. Yet, there is a noticeable absence of a cost-effective and standardized testbed tailored to evaluating and comparing these algorithms. To bridge this gap, we present a generalized version of the 24-Puzzle: the $(N,K)$-Puzzle, which challenges language models to reach a target value $K$ with $N$ integers. We evaluate the effectiveness of established RL algorithms such as Proximal Policy Optimization (PPO), alongside novel approaches like Identity Policy Optimization (IPO) and Direct Policy Optimization (DPO).
Learning Optimal Tax Design in Nonatomic Congestion Games
Feb 12, 2024We study how to learn the optimal tax design to maximize the efficiency in nonatomic congestion games. It is known that self-interested behavior among the players can damage the system's efficiency. Tax mechanisms is a common method to alleviate this issue and induce socially optimal behavior. In this work, we take the initial step for learning the optimal tax that can minimize the social cost with \emph{equilibrium feedback}, i.e., the tax designer can only observe the equilibrium state under the enforced tax. Existing algorithms are not applicable due to the exponentially large tax function space, nonexistence of the gradient, and nonconvexity of the objective. To tackle these challenges, our algorithm leverages several novel components: (1) piece-wise linear tax to approximate the optimal tax; (2) an extra linear term to guarantee a strongly convex potential function; (3) efficient subroutine to find the ``boundary'' tax. The algorithm can find an $\epsilon$-optimal tax with $O(\beta F^2/\epsilon)$ sample complexity, where $\beta$ is the smoothness of the cost function and $F$ is the number of facilities.
Refined Sample Complexity for Markov Games with Independent Linear Function Approximation
Feb 11, 2024Markov Games (MG) is an important model for Multi-Agent Reinforcement Learning (MARL). It was long believed that the "curse of multi-agents" (i.e., the algorithmic performance drops exponentially with the number of agents) is unavoidable until several recent works (Daskalakis et al., 2023; Cui et al., 2023; Wang et al., 2023. While these works did resolve the curse of multi-agents, when the state spaces are prohibitively large and (linear) function approximations are deployed, they either had a slower convergence rate of $O(T^{-1/4})$ or brought a polynomial dependency on the number of actions $A_{\max}$ -- which is avoidable in single-agent cases even when the loss functions can arbitrarily vary with time (Dai et al., 2023). This paper first refines the `AVLPR` framework by Wang et al. (2023), with an insight of *data-dependent* (i.e., stochastic) pessimistic estimation of the sub-optimality gap, allowing a broader choice of plug-in algorithms. When specialized to MGs with independent linear function approximations, we propose novel *action-dependent bonuses* to cover occasionally extreme estimation errors. With the help of state-of-the-art techniques from the single-agent RL literature, we give the first algorithm that tackles the curse of multi-agents, attains the optimal $O(T^{-1/2})$ convergence rate, and avoids $\text{poly}(A_{\max})$ dependency simultaneously.
Free from Bellman Completeness: Trajectory Stitching via Model-based Return-conditioned Supervised Learning
Oct 30, 2023



Off-policy dynamic programming (DP) techniques such as $Q$-learning have proven to be an important technique for solving sequential decision-making problems. However, in the presence of function approximation such algorithms are not guaranteed to converge, often diverging due to the absence of Bellman-completeness in the function classes considered, a crucial condition for the success of DP-based methods. In this paper, we show how off-policy learning techniques based on return-conditioned supervised learning (RCSL) are able to circumvent these challenges of Bellman completeness, converging under significantly more relaxed assumptions inherited from supervised learning. We prove there exists a natural environment in which if one uses two-layer multilayer perceptron as the function approximator, the layer width needs to grow linearly with the state space size to satisfy Bellman-completeness while a constant layer width is enough for RCSL. These findings take a step towards explaining the superior empirical performance of RCSL methods compared to DP-based methods in environments with near-optimal datasets. Furthermore, in order to learn from sub-optimal datasets, we propose a simple framework called MBRCSL, granting RCSL methods the ability of dynamic programming to stitch together segments from distinct trajectories. MBRCSL leverages learned dynamics models and forward sampling to accomplish trajectory stitching while avoiding the need for Bellman completeness that plagues all dynamic programming algorithms. We propose both theoretical analysis and experimental evaluation to back these claims, outperforming state-of-the-art model-free and model-based offline RL algorithms across several simulated robotics problems.
A Black-box Approach for Non-stationary Multi-agent Reinforcement Learning
Jun 12, 2023



We investigate learning the equilibria in non-stationary multi-agent systems and address the challenges that differentiate multi-agent learning from single-agent learning. Specifically, we focus on games with bandit feedback, where testing an equilibrium can result in substantial regret even when the gap to be tested is small, and the existence of multiple optimal solutions (equilibria) in stationary games poses extra challenges. To overcome these obstacles, we propose a versatile black-box approach applicable to a broad spectrum of problems, such as general-sum games, potential games, and Markov games, when equipped with appropriate learning and testing oracles for stationary environments. Our algorithms can achieve $\widetilde{O}\left(\Delta^{1/4}T^{3/4}\right)$ regret when the degree of nonstationarity, as measured by total variation $\Delta$, is known, and $\widetilde{O}\left(\Delta^{1/5}T^{4/5}\right)$ regret when $\Delta$ is unknown, where $T$ is the number of rounds. Meanwhile, our algorithm inherits the favorable dependence on number of agents from the oracles. As a side contribution that may be independent of interest, we show how to test for various types of equilibria by a black-box reduction to single-agent learning, which includes Nash equilibria, correlated equilibria, and coarse correlated equilibria.
Breaking the Curse of Multiagents in a Large State Space: RL in Markov Games with Independent Linear Function Approximation
Mar 02, 2023We propose a new model, independent linear Markov game, for multi-agent reinforcement learning with a large state space and a large number of agents. This is a class of Markov games with independent linear function approximation, where each agent has its own function approximation for the state-action value functions that are marginalized by other players' policies. We design new algorithms for learning the Markov coarse correlated equilibria (CCE) and Markov correlated equilibria (CE) with sample complexity bounds that only scale polynomially with each agent's own function class complexity, thus breaking the curse of multiagents. In contrast, existing works for Markov games with function approximation have sample complexity bounds scale with the size of the \emph{joint action space} when specialized to the canonical tabular Markov game setting, which is exponentially large in the number of agents. Our algorithms rely on two key technical innovations: (1) utilizing policy replay to tackle non-stationarity incurred by multiple agents and the use of function approximation; (2) separating learning Markov equilibria and exploration in the Markov games, which allows us to use the full-information no-regret learning oracle instead of the stronger bandit-feedback no-regret learning oracle used in the tabular setting. Furthermore, we propose an iterative-best-response type algorithm that can learn pure Markov Nash equilibria in independent linear Markov potential games. In the tabular case, by adapting the policy replay mechanism for independent linear Markov games, we propose an algorithm with $\widetilde{O}(\epsilon^{-2})$ sample complexity to learn Markov CCE, which improves the state-of-the-art result $\widetilde{O}(\epsilon^{-3})$ in Daskalakis et al. 2022, where $\epsilon$ is the desired accuracy, and also significantly improves other problem parameters.
Offline congestion games: How feedback type affects data coverage requirement
Oct 24, 2022



This paper investigates when one can efficiently recover an approximate Nash Equilibrium (NE) in offline congestion games.The existing dataset coverage assumption in offline general-sum games inevitably incurs a dependency on the number of actions, which can be exponentially large in congestion games. We consider three different types of feedback with decreasing revealed information. Starting from the facility-level (a.k.a., semi-bandit) feedback, we propose a novel one-unit deviation coverage condition and give a pessimism-type algorithm that can recover an approximate NE. For the agent-level (a.k.a., bandit) feedback setting, interestingly, we show the one-unit deviation coverage condition is not sufficient. On the other hand, we convert the game to multi-agent linear bandits and show that with a generalized data coverage assumption in offline linear bandits, we can efficiently recover the approximate NE. Lastly, we consider a novel type of feedback, the game-level feedback where only the total reward from all agents is revealed. Again, we show the coverage assumption for the agent-level feedback setting is insufficient in the game-level feedback setting, and with a stronger version of the data coverage assumption for linear bandits, we can recover an approximate NE. Together, our results constitute the first study of offline congestion games and imply formal separations between different types of feedback.
Learning in Congestion Games with Bandit Feedback
Jun 04, 2022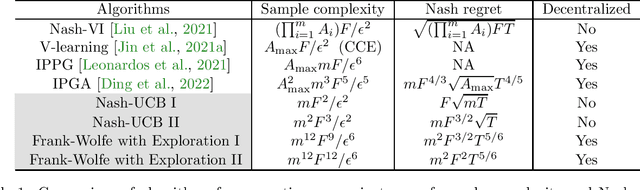
Learning Nash equilibria is a central problem in multi-agent systems. In this paper, we investigate congestion games, a class of games with benign theoretical structure and broad real-world applications. We first propose a centralized algorithm based on the optimism in the face of uncertainty principle for congestion games with (semi-)bandit feedback, and obtain finite-sample guarantees. Then we propose a decentralized algorithm via a novel combination of the Frank-Wolfe method and G-optimal design. By exploiting the structure of the congestion game, we show the sample complexity of both algorithms depends only polynomially on the number of players and the number of facilities, but not the size of the action set, which can be exponentially large in terms of the number of facilities. We further define a new problem class, Markov congestion games, which allows us to model the non-stationarity in congestion games. We propose a centralized algorithm for Markov congestion games, whose sample complexity again has only polynomial dependence on all relevant problem parameters, but not the size of the action set.