 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScaling Spatial Intelligence with Multimodal Foundation Models
Nov 17, 2025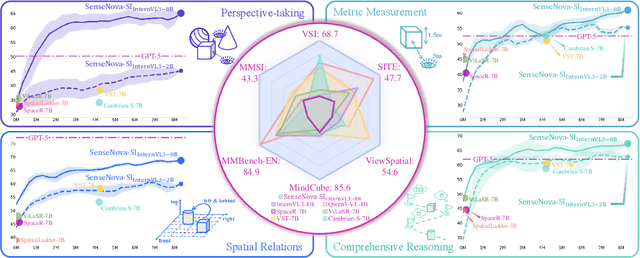
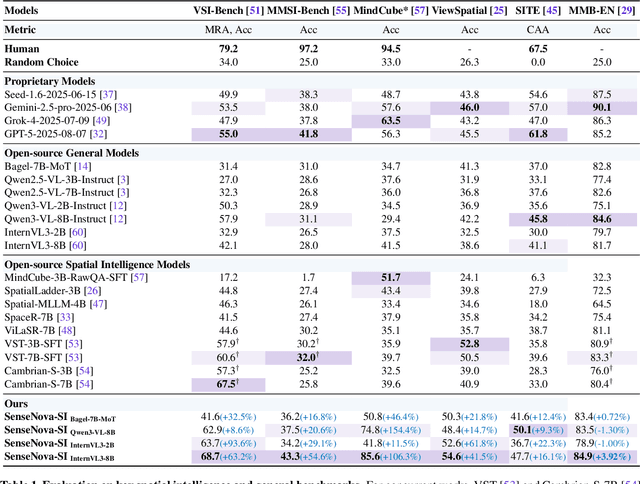
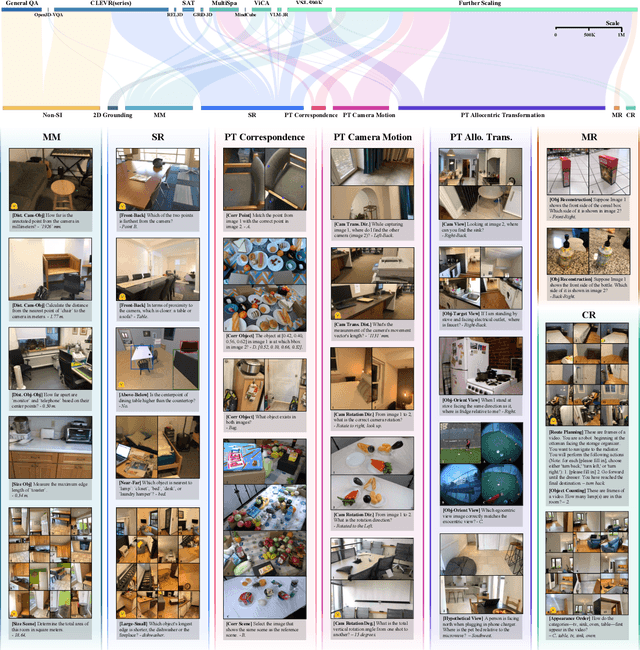
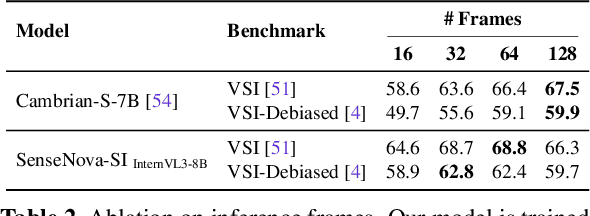
Despite remarkable progress, multimodal foundation models still exhibit surprising deficiencies in spatial intelligence. In this work, we explore scaling up multimodal foundation models to cultivate spatial intelligence within the SenseNova-SI family, built upon established multimodal foundations including visual understanding models (i.e., Qwen3-VL and InternVL3) and unified understanding and generation models (i.e., Bagel). We take a principled approach to constructing high-performing and robust spatial intelligence by systematically curating SenseNova-SI-8M: eight million diverse data samples under a rigorous taxonomy of spatial capabilities. SenseNova-SI demonstrates unprecedented performance across a broad range of spatial intelligence benchmarks: 68.7% on VSI-Bench, 43.3% on MMSI, 85.6% on MindCube, 54.6% on ViewSpatial, and 50.1% on SITE, while maintaining strong general multimodal understanding (e.g., 84.9% on MMBench-En). More importantly, we analyze the impact of data scaling, discuss early signs of emergent generalization capabilities enabled by diverse data training, analyze the risk of overfitting and language shortcuts, present a preliminary study on spatial chain-of-thought reasoning, and validate the potential downstream application. SenseNova-SI is an ongoing project, and this report will be updated continuously. All newly trained multimodal foundation models are publicly released to facilitate further research in this direction.
The Quest for Generalizable Motion Generation: Data, Model, and Evaluation
Oct 30, 2025Despite recent advances in 3D human motion generation (MoGen) on standard benchmarks, existing models still face a fundamental bottleneck in their generalization capability. In contrast, adjacent generative fields, most notably video generation (ViGen), have demonstrated remarkable generalization in modeling human behaviors, highlighting transferable insights that MoGen can leverage. Motivated by this observation, we present a comprehensive framework that systematically transfers knowledge from ViGen to MoGen across three key pillars: data, modeling, and evaluation. First, we introduce ViMoGen-228K, a large-scale dataset comprising 228,000 high-quality motion samples that integrates high-fidelity optical MoCap data with semantically annotated motions from web videos and synthesized samples generated by state-of-the-art ViGen models. The dataset includes both text-motion pairs and text-video-motion triplets, substantially expanding semantic diversity. Second, we propose ViMoGen, a flow-matching-based diffusion transformer that unifies priors from MoCap data and ViGen models through gated multimodal conditioning. To enhance efficiency, we further develop ViMoGen-light, a distilled variant that eliminates video generation dependencies while preserving strong generalization. Finally, we present MBench, a hierarchical benchmark designed for fine-grained evaluation across motion quality, prompt fidelity, and generalization ability. Extensive experiments show that our framework significantly outperforms existing approaches in both automatic and human evaluations. The code, data, and benchmark will be made publicly available.
Has GPT-5 Achieved Spatial Intelligence? An Empirical Study
Aug 18, 2025



Multi-modal models have achieved remarkable progress in recent years. Nevertheless, they continue to exhibit notable limitations in spatial understanding and reasoning, which are fundamental capabilities to achieving artificial general intelligence. With the recent release of GPT-5, allegedly the most powerful AI model to date, it is timely to examine where the leading models stand on the path toward spatial intelligence. First, we propose a comprehensive taxonomy of spatial tasks that unifies existing benchmarks and discuss the challenges in ensuring fair evaluation. We then evaluate state-of-the-art proprietary and open-source models on eight key benchmarks, at a cost exceeding one billion total tokens. Our empirical study reveals that (1) GPT-5 demonstrates unprecedented strength in spatial intelligence, yet (2) still falls short of human performance across a broad spectrum of tasks. Moreover, we (3) identify the more challenging spatial intelligence problems for multi-modal models, and (4) proprietary models do not exhibit a decisive advantage when facing the most difficult problems. In addition, we conduct a qualitative evaluation across a diverse set of scenarios that are intuitive for humans yet fail even the most advanced multi-modal models.
SMPLest-X: Ultimate Scaling for Expressive Human Pose and Shape Estimation
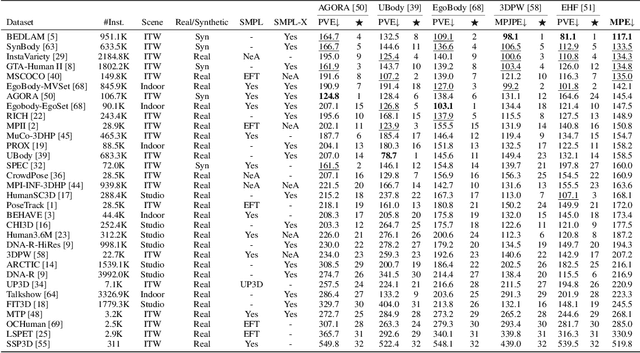
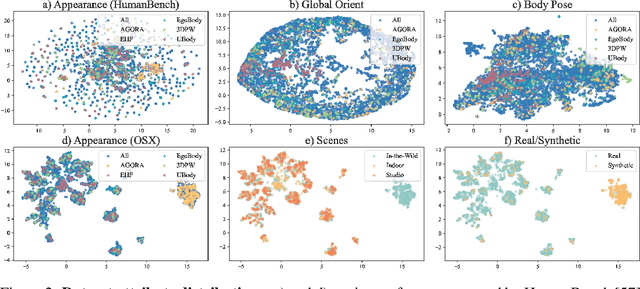
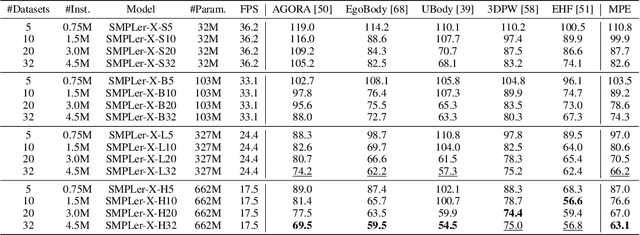
Jan 16, 2025Expressive human pose and shape estimation (EHPS) unifies body, hands, and face motion capture with numerous applications. Despite encouraging progress, current state-of-the-art methods focus on training innovative architectural designs on confined datasets. In this work, we investigate the impact of scaling up EHPS towards a family of generalist foundation models. 1) For data scaling, we perform a systematic investigation on 40 EHPS datasets, encompassing a wide range of scenarios that a model trained on any single dataset cannot handle. More importantly, capitalizing on insights obtained from the extensive benchmarking process, we optimize our training scheme and select datasets that lead to a significant leap in EHPS capabilities. Ultimately, we achieve diminishing returns at 10M training instances from diverse data sources. 2) For model scaling, we take advantage of vision transformers (up to ViT-Huge as the backbone) to study the scaling law of model sizes in EHPS. To exclude the influence of algorithmic design, we base our experiments on two minimalist architectures: SMPLer-X, which consists of an intermediate step for hand and face localization, and SMPLest-X, an even simpler version that reduces the network to its bare essentials and highlights significant advances in the capture of articulated hands. With big data and the large model, the foundation models exhibit strong performance across diverse test benchmarks and excellent transferability to even unseen environments. Moreover, our finetuning strategy turns the generalist into specialist models, allowing them to achieve further performance boosts. Notably, our foundation models consistently deliver state-of-the-art results on seven benchmarks such as AGORA, UBody, EgoBody, and our proposed SynHand dataset for comprehensive hand evaluation. (Code is available at: https://github.com/wqyin/SMPLest-X).
AiOS: All-in-One-Stage Expressive Human Pose and Shape Estimation
Mar 26, 2024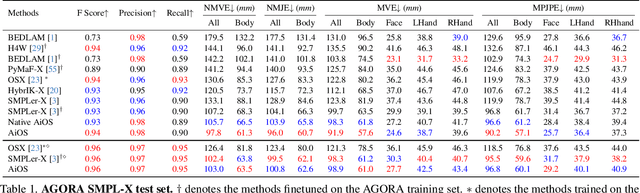
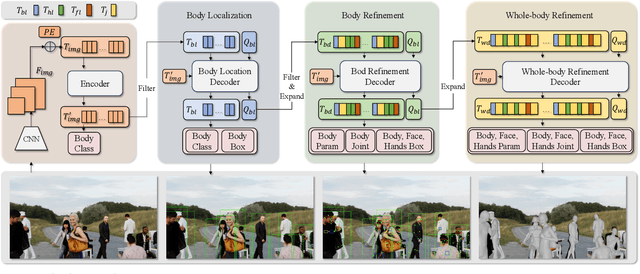
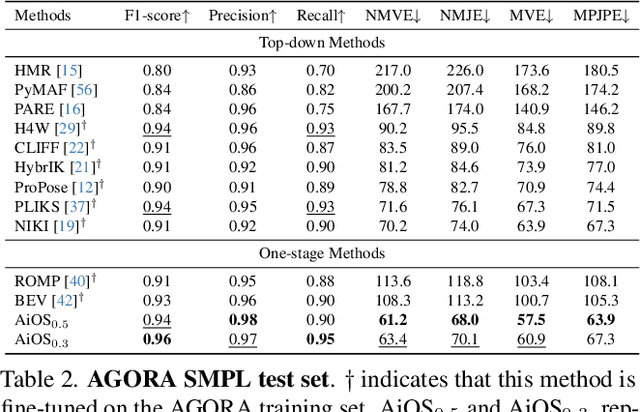
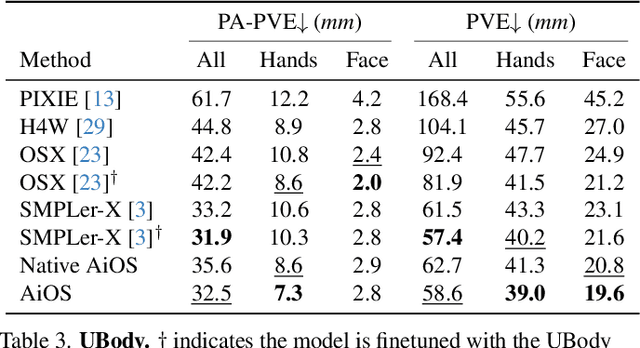
Expressive human pose and shape estimation (a.k.a. 3D whole-body mesh recovery) involves the human body, hand, and expression estimation. Most existing methods have tackled this task in a two-stage manner, first detecting the human body part with an off-the-shelf detection model and inferring the different human body parts individually. Despite the impressive results achieved, these methods suffer from 1) loss of valuable contextual information via cropping, 2) introducing distractions, and 3) lacking inter-association among different persons and body parts, inevitably causing performance degradation, especially for crowded scenes. To address these issues, we introduce a novel all-in-one-stage framework, AiOS, for multiple expressive human pose and shape recovery without an additional human detection step. Specifically, our method is built upon DETR, which treats multi-person whole-body mesh recovery task as a progressive set prediction problem with various sequential detection. We devise the decoder tokens and extend them to our task. Specifically, we first employ a human token to probe a human location in the image and encode global features for each instance, which provides a coarse location for the later transformer block. Then, we introduce a joint-related token to probe the human joint in the image and encoder a fine-grained local feature, which collaborates with the global feature to regress the whole-body mesh. This straightforward but effective model outperforms previous state-of-the-art methods by a 9% reduction in NMVE on AGORA, a 30% reduction in PVE on EHF, a 10% reduction in PVE on ARCTIC, and a 3% reduction in PVE on EgoBody.
WHAC: World-grounded Humans and Cameras
Mar 19, 2024



Estimating human and camera trajectories with accurate scale in the world coordinate system from a monocular video is a highly desirable yet challenging and ill-posed problem. In this study, we aim to recover expressive parametric human models (i.e., SMPL-X) and corresponding camera poses jointly, by leveraging the synergy between three critical players: the world, the human, and the camera. Our approach is founded on two key observations. Firstly, camera-frame SMPL-X estimation methods readily recover absolute human depth. Secondly, human motions inherently provide absolute spatial cues. By integrating these insights, we introduce a novel framework, referred to as WHAC, to facilitate world-grounded expressive human pose and shape estimation (EHPS) alongside camera pose estimation, without relying on traditional optimization techniques. Additionally, we present a new synthetic dataset, WHAC-A-Mole, which includes accurately annotated humans and cameras, and features diverse interactive human motions as well as realistic camera trajectories. Extensive experiments on both standard and newly established benchmarks highlight the superiority and efficacy of our framework. We will make the code and dataset publicly available.
SMPLer-X: Scaling Up Expressive Human Pose and Shape Estimation
Sep 29, 2023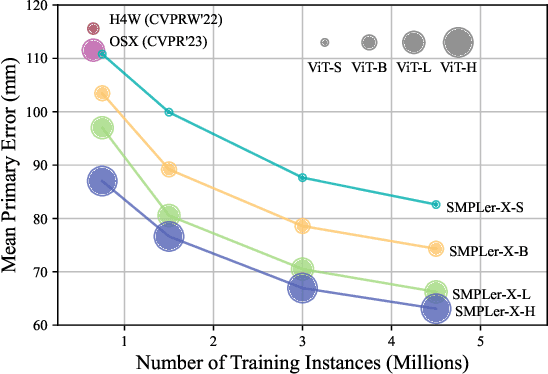
Expressive human pose and shape estimation (EHPS) unifies body, hands, and face motion capture with numerous applications. Despite encouraging progress, current state-of-the-art methods still depend largely on confined training datasets. In this work, we investigate scaling up EHPS towards the first generalist foundation model (dubbed SMPLer-X), with up to ViT-Huge as the backbone and training with up to 4.5M instances from diverse data sources. With big data and the large model, SMPLer-X exhibits strong performance across diverse test benchmarks and excellent transferability to even unseen environments. 1) For the data scaling, we perform a systematic investigation on 32 EHPS datasets, encompassing a wide range of scenarios that a model trained on any single dataset cannot handle. More importantly, capitalizing on insights obtained from the extensive benchmarking process, we optimize our training scheme and select datasets that lead to a significant leap in EHPS capabilities. 2) For the model scaling, we take advantage of vision transformers to study the scaling law of model sizes in EHPS. Moreover, our finetuning strategy turn SMPLer-X into specialist models, allowing them to achieve further performance boosts. Notably, our foundation model SMPLer-X consistently delivers state-of-the-art results on seven benchmarks such as AGORA (107.2 mm NMVE), UBody (57.4 mm PVE), EgoBody (63.6 mm PVE), and EHF (62.3 mm PVE without finetuning).
Learning Dense UV Completion for Human Mesh Recovery
Aug 10, 2023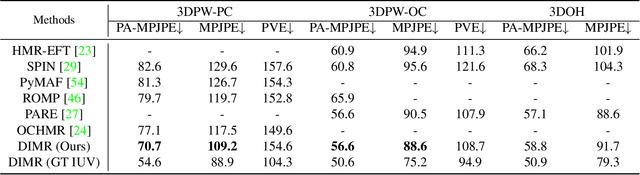
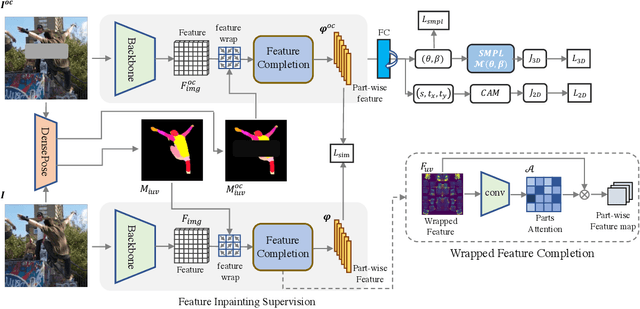
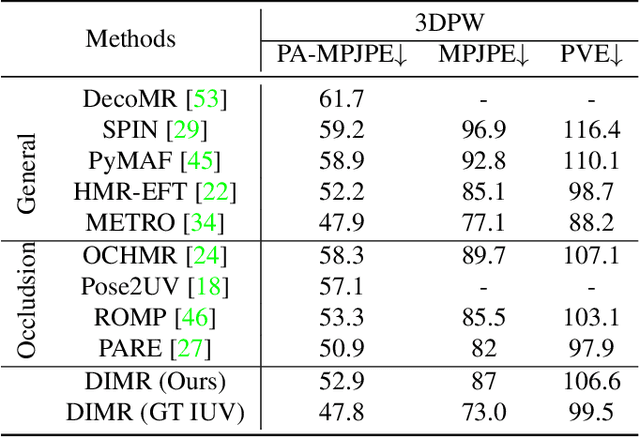
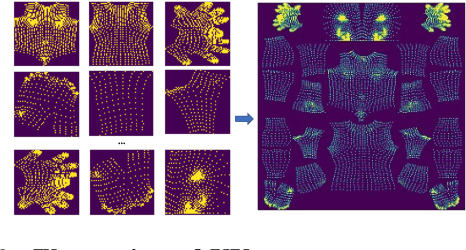
Human mesh reconstruction from a single image is challenging in the presence of occlusion, which can be caused by self, objects, or other humans. Existing methods either fail to separate human features accurately or lack proper supervision for feature completion. In this paper, we propose Dense Inpainting Human Mesh Recovery (DIMR), a two-stage method that leverages dense correspondence maps to handle occlusion. Our method utilizes a dense correspondence map to separate visible human features and completes human features on a structured UV map dense human with an attention-based feature completion module. We also design a feature inpainting training procedure that guides the network to learn from unoccluded features. We evaluate our method on several datasets and demonstrate its superior performance under heavily occluded scenarios compared to other methods. Extensive experiments show that our method obviously outperforms prior SOTA methods on heavily occluded images and achieves comparable results on the standard benchmarks (3DPW).
Zolly: Zoom Focal Length Correctly for Perspective-Distorted Human Mesh Reconstruction
Mar 24, 2023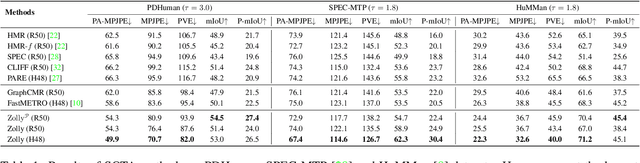
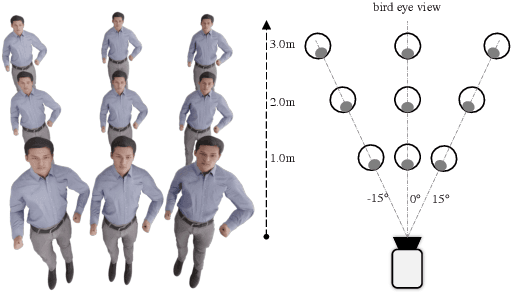
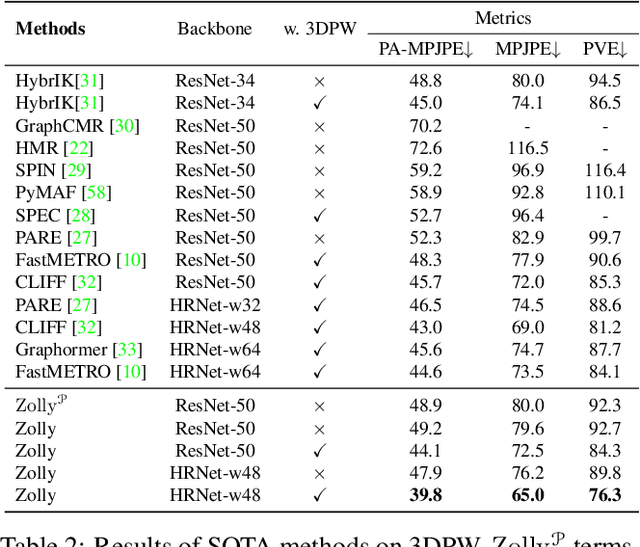
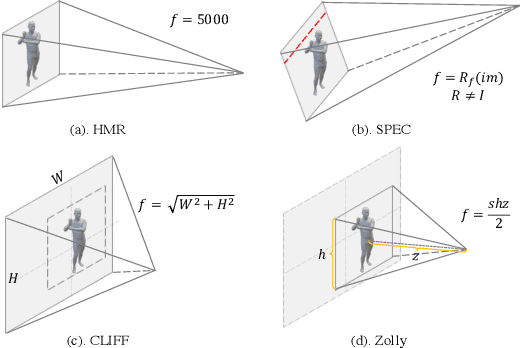
As it is hard to calibrate single-view RGB images in the wild, existing 3D human mesh reconstruction (3DHMR) methods either use a constant large focal length or estimate one based on the background environment context, which can not tackle the problem of the torso, limb, hand or face distortion caused by perspective camera projection when the camera is close to the human body. The naive focal length assumptions can harm this task with the incorrectly formulated projection matrices. To solve this, we propose Zolly, the first 3DHMR method focusing on perspective-distorted images. Our approach begins with analysing the reason for perspective distortion, which we find is mainly caused by the relative location of the human body to the camera center. We propose a new camera model and a novel 2D representation, termed distortion image, which describes the 2D dense distortion scale of the human body. We then estimate the distance from distortion scale features rather than environment context features. Afterwards, we integrate the distortion feature with image features to reconstruct the body mesh. To formulate the correct projection matrix and locate the human body position, we simultaneously use perspective and weak-perspective projection loss. Since existing datasets could not handle this task, we propose the first synthetic dataset PDHuman and extend two real-world datasets tailored for this task, all containing perspective-distorted human images. Extensive experiments show that Zolly outperforms existing state-of-the-art methods on both perspective-distorted datasets and the standard benchmark (3DPW).