 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Simultaneous Localisation and Auto-Calibration using Gaussian Belief Propagation
Jan 26, 2024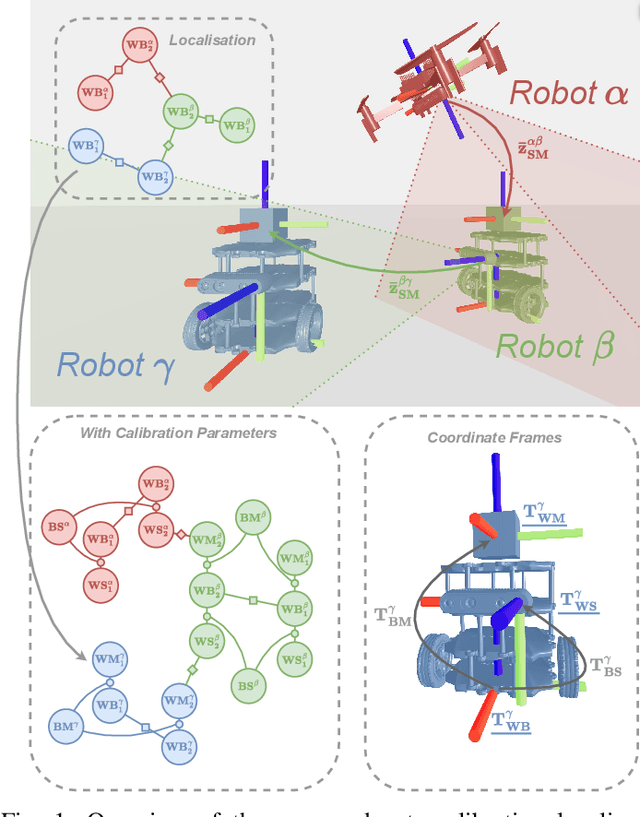
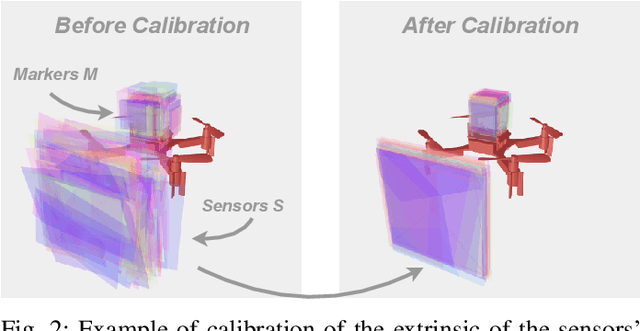
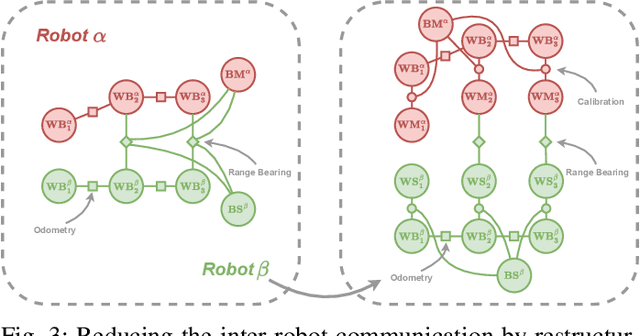
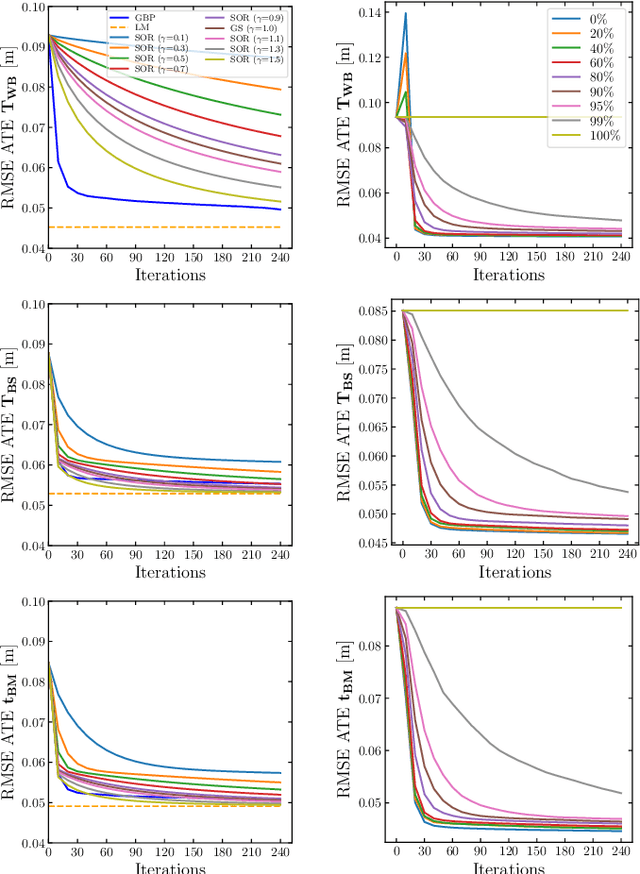
We present a novel scalable, fully distributed, and online method for simultaneous localisation and extrinsic calibration for multi-robot setups. Individual a priori unknown robot poses are probabilistically inferred as robots sense each other while simultaneously calibrating their sensors and markers extrinsic using Gaussian Belief Propagation. In the presented experiments, we show how our method not only yields accurate robot localisation and auto-calibration but also is able to perform under challenging circumstances such as highly noisy measurements, significant communication failures or limited communication range.
* Published in IEEE Robotics and Automation Letters (RA-L) 2024
Gaussian Splatting SLAM
Dec 11, 2023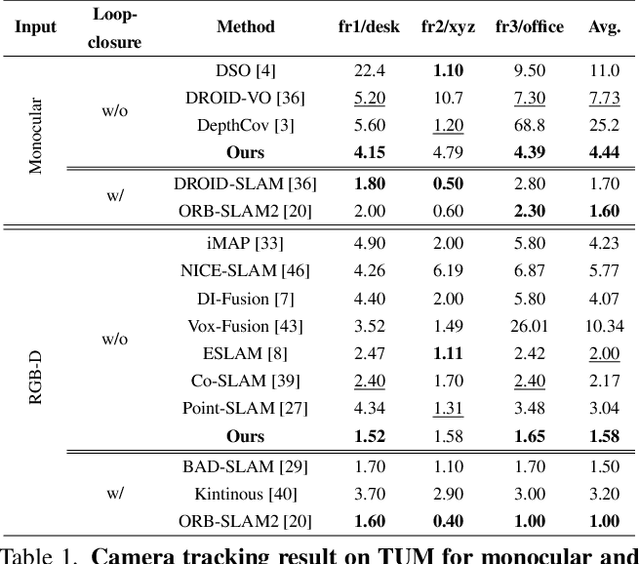
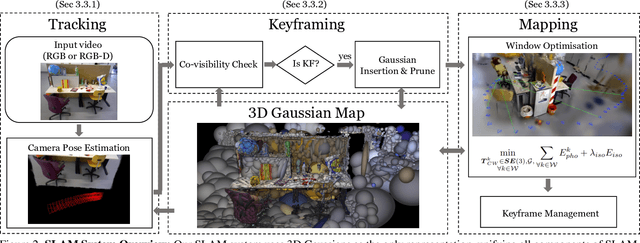
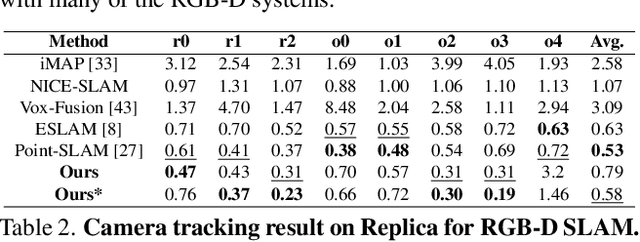
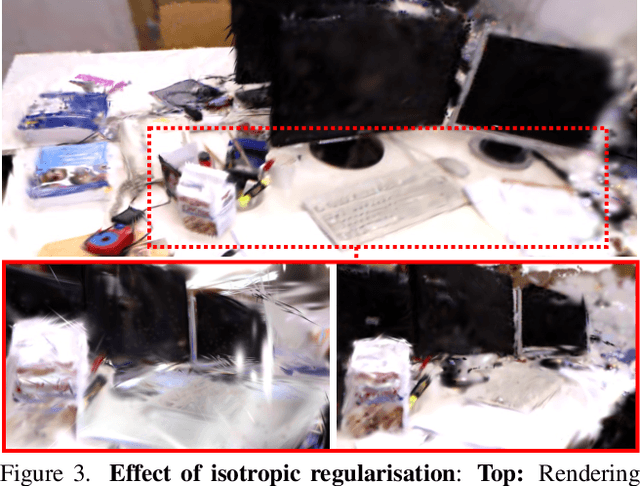
We present the first application of 3D Gaussian Splatting to incremental 3D reconstruction using a single moving monocular or RGB-D camera. Our Simultaneous Localisation and Mapping (SLAM) method, which runs live at 3fps, utilises Gaussians as the only 3D representation, unifying the required representation for accurate, efficient tracking, mapping, and high-quality rendering. Several innovations are required to continuously reconstruct 3D scenes with high fidelity from a live camera. First, to move beyond the original 3DGS algorithm, which requires accurate poses from an offline Structure from Motion (SfM) system, we formulate camera tracking for 3DGS using direct optimisation against the 3D Gaussians, and show that this enables fast and robust tracking with a wide basin of convergence. Second, by utilising the explicit nature of the Gaussians, we introduce geometric verification and regularisation to handle the ambiguities occurring in incremental 3D dense reconstruction. Finally, we introduce a full SLAM system which not only achieves state-of-the-art results in novel view synthesis and trajectory estimation, but also reconstruction of tiny and even transparent objects.
Systematic Comparison of Path Planning Algorithms using PathBench
Mar 07, 2022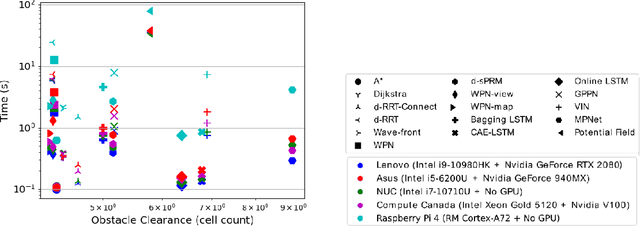
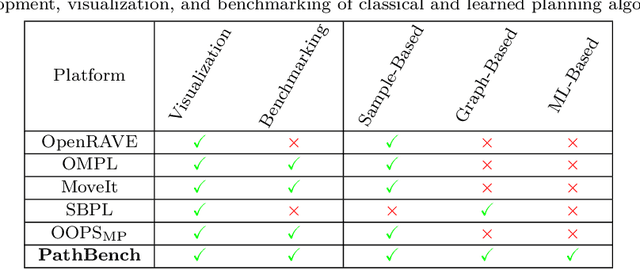
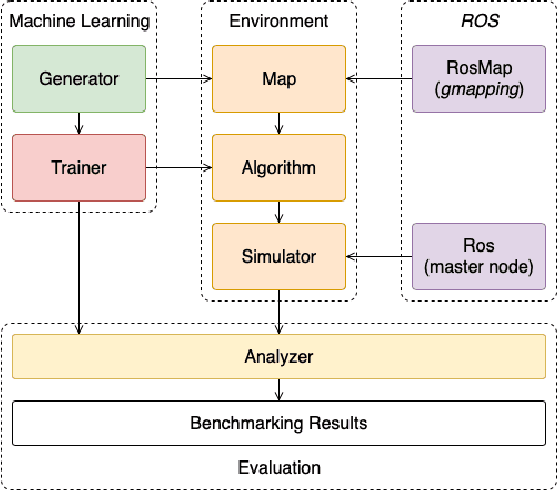
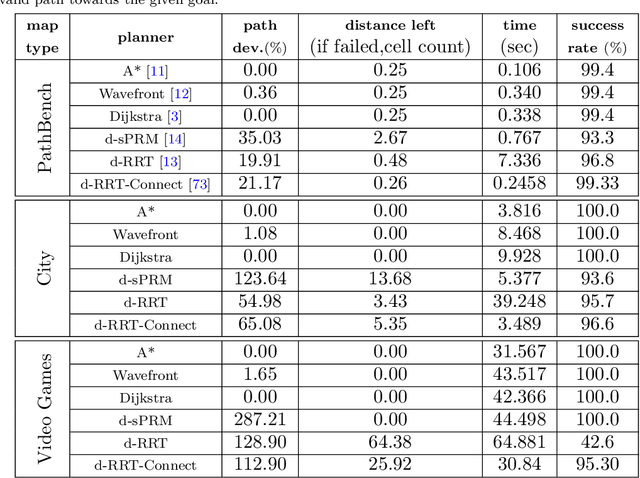
Path planning is an essential component of mobile robotics. Classical path planning algorithms, such as wavefront and rapidly-exploring random tree (RRT) are used heavily in autonomous robots. With the recent advances in machine learning, development of learning-based path planning algorithms has been experiencing rapid growth. An unified path planning interface that facilitates the development and benchmarking of existing and new algorithms is needed. This paper presents PathBench, a platform for developing, visualizing, training, testing, and benchmarking of existing and future, classical and learning-based path planning algorithms in 2D and 3D grid world environments. Many existing path planning algorithms are supported; e.g. A*, Dijkstra, waypoint planning networks, value iteration networks, gated path planning networks; and integrating new algorithms is easy and clearly specified. The benchmarking ability of PathBench is explored in this paper by comparing algorithms across five different hardware systems and three different map types, including built-in PathBench maps, video game maps, and maps from real world databases. Metrics, such as path length, success rate, and computational time, were used to evaluate algorithms. Algorithmic analysis was also performed on a real world robot to demonstrate PathBench's support for Robot Operating System (ROS). PathBench is open source.
A Robot Web for Distributed Many-Device Localisation
Feb 07, 2022We show that a distributed network of robots or other devices which make measurements of each other can collaborate to globally localise via efficient ad-hoc peer to peer communication. Our Robot Web solution is based on Gaussian Belief Propagation on the fundamental non-linear factor graph describing the probabilistic structure of all of the observations robots make internally or of each other, and is flexible for any type of robot, motion or sensor. We define a simple and efficient communication protocol which can be implemented by the publishing and reading of web pages or other asynchronous communication technologies. We show in simulations with up to 1000 robots interacting in arbitrary patterns that our solution convergently achieves global accuracy as accurate as a centralised non-linear factor graph solver while operating with high distributed efficiency of computation and communication. Via the use of robust factors in GBP, our method is tolerant to a high percentage of faults in sensor measurements or dropped communication packets.
PathBench: A Benchmarking Platform for Classical and Learned Path Planning Algorithms
May 04, 2021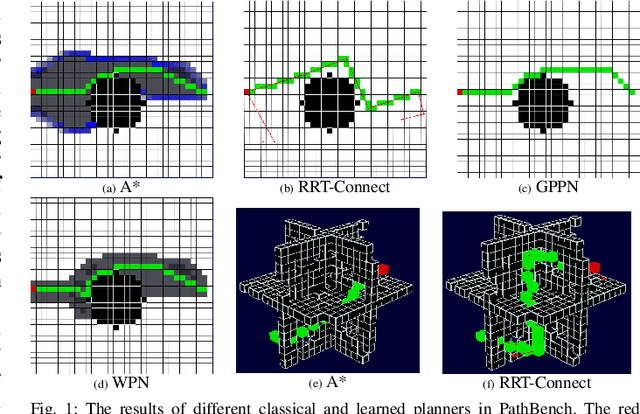
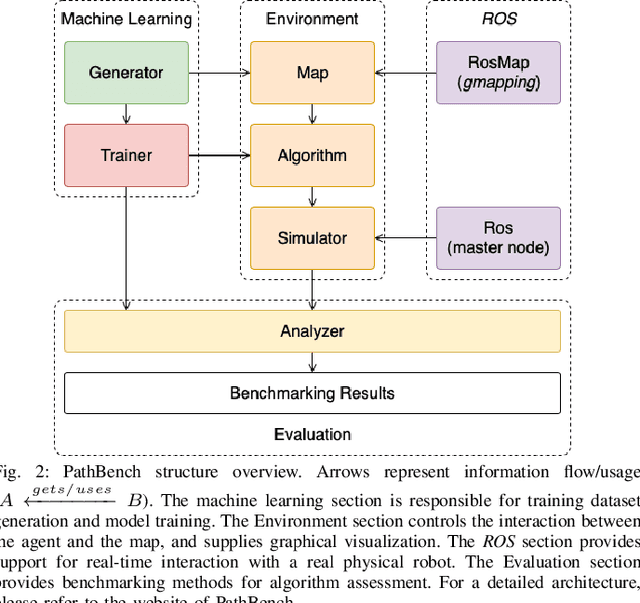
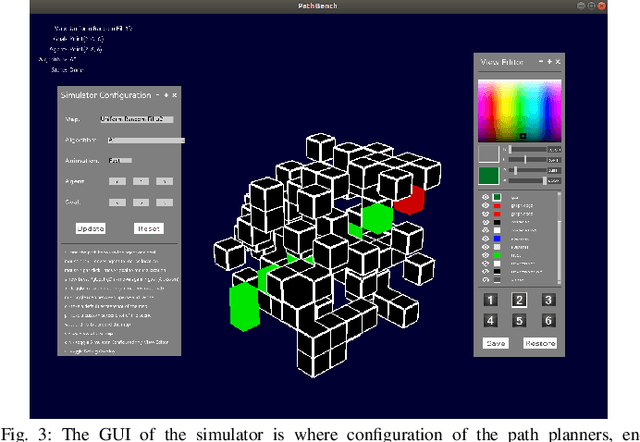
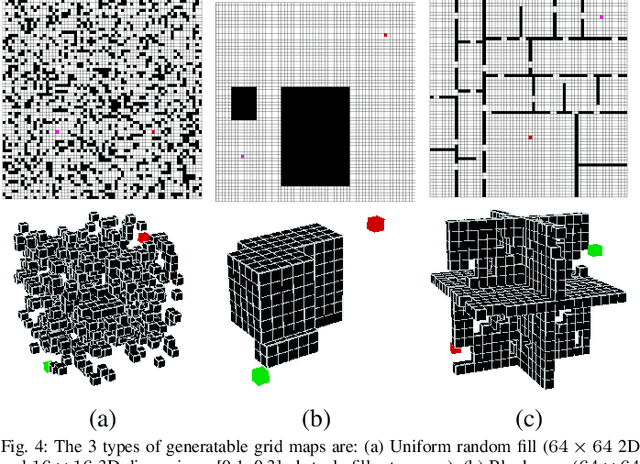
Path planning is a key component in mobile robotics. A wide range of path planning algorithms exist, but few attempts have been made to benchmark the algorithms holistically or unify their interface. Moreover, with the recent advances in deep neural networks, there is an urgent need to facilitate the development and benchmarking of such learning-based planning algorithms. This paper presents PathBench, a platform for developing, visualizing, training, testing, and benchmarking of existing and future, classical and learned 2D and 3D path planning algorithms, while offering support for Robot Oper-ating System (ROS). Many existing path planning algorithms are supported; e.g. A*, wavefront, rapidly-exploring random tree, value iteration networks, gated path planning networks; and integrating new algorithms is easy and clearly specified. We demonstrate the benchmarking capability of PathBench by comparing implemented classical and learned algorithms for metrics, such as path length, success rate, computational time and path deviation. These evaluations are done on built-in PathBench maps and external path planning environments from video games and real world databases. PathBench is open source.
Cain: Automatic Code Generation for Simultaneous Convolutional Kernels on Focal-plane Sensor-processors
Jan 21, 2021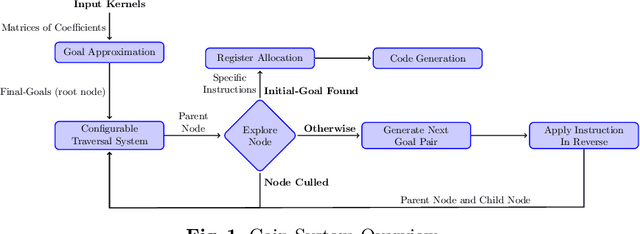
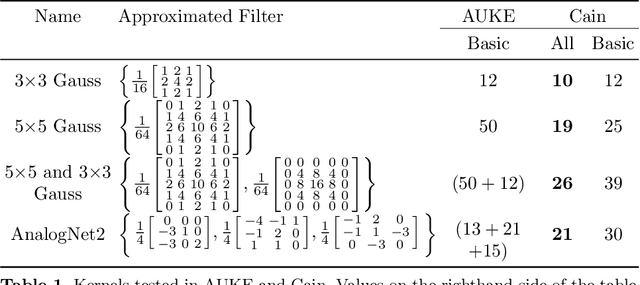
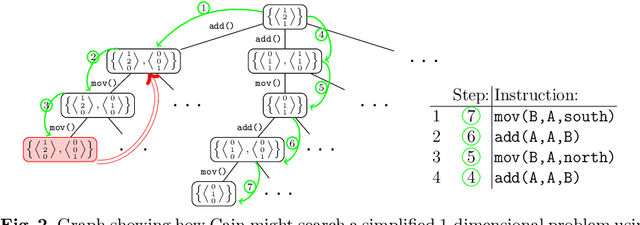
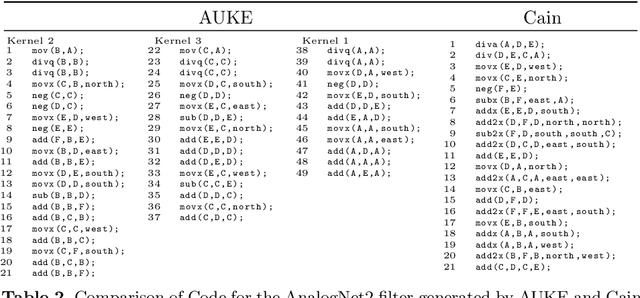
Focal-plane Sensor-processors (FPSPs) are a camera technology that enable low power, high frame rate computation, making them suitable for edge computation. Unfortunately, these devices' limited instruction sets and registers make developing complex algorithms difficult. In this work, we present Cain - a compiler that targets SCAMP-5, a general-purpose FPSP - which generates code from multiple convolutional kernels. As an example, given the convolutional kernels for an MNIST digit recognition neural network, Cain produces code that is half as long, when compared to the other available compilers for SCAMP-5.
AnalogNet: Convolutional Neural Network Inference on Analog Focal Plane Sensor Processors
Jun 21, 2020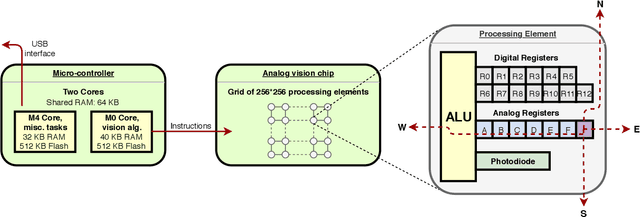
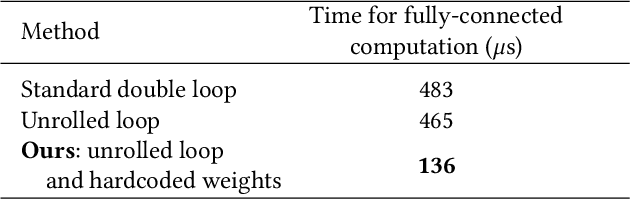
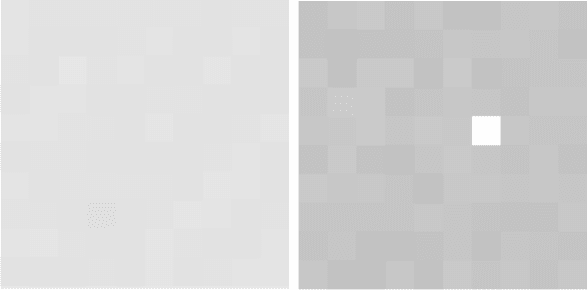
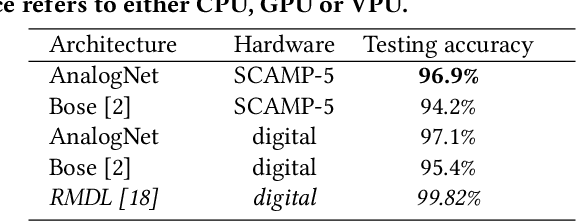
We present a high-speed, energy-efficient Convolutional Neural Network (CNN) architecture utilising the capabilities of a unique class of devices known as analog Focal Plane Sensor Processors (FPSP), in which the sensor and the processor are embedded together on the same silicon chip. Unlike traditional vision systems, where the sensor array sends collected data to a separate processor for processing, FPSPs allow data to be processed on the imaging device itself. This unique architecture enables ultra-fast image processing and high energy efficiency, at the expense of limited processing resources and approximate computations. In this work, we show how to convert standard CNNs to FPSP code, and demonstrate a method of training networks to increase their robustness to analog computation errors. Our proposed architecture, coined AnalogNet, reaches a testing accuracy of 96.9% on the MNIST handwritten digits recognition task, at a speed of 2260 FPS, for a cost of 0.7 mJ per frame.
BIT-VO: Visual Odometry at 300 FPS using Binary Features from the Focal Plane
Apr 23, 2020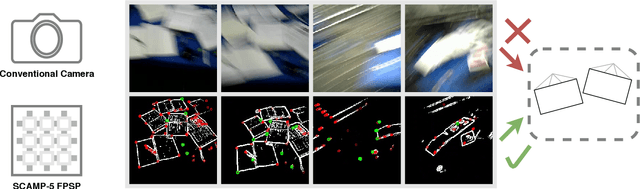
Focal-plane Sensor-processor (FPSP) is a next-generation camera technology which enables every pixel on the sensor chip to perform computation in parallel, on the focal plane where the light intensity is captured. SCAMP-5 is a general-purpose FPSP used in this work and it carries out computations in the analog domain before analog to digital conversion. By extracting features from the image on the focal plane, data which is digitized and transferred is reduced. As a consequence, SCAMP-5 offers a high frame rate while maintaining low energy consumption. Here, we present BIT-VO, which is, to the best of our knowledge, the first 6 Degrees of Freedom visual odometry algorithm which utilises the FPSP. Our entire system operates at 300 FPS in a natural scene, using binary edges and corner features detected by the SCAMP-5.
SLAMBench2: Multi-Objective Head-to-Head Benchmarking for Visual SLAM
Aug 21, 2018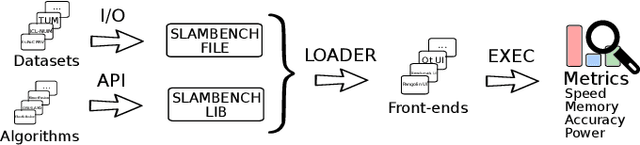
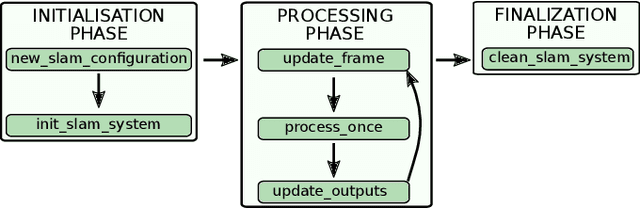
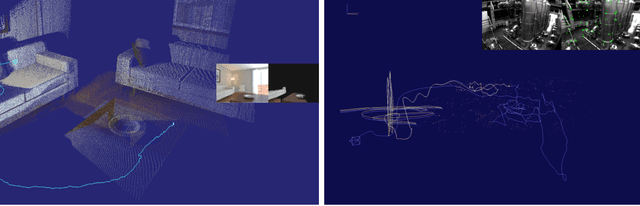

SLAM is becoming a key component of robotics and augmented reality (AR) systems. While a large number of SLAM algorithms have been presented, there has been little effort to unify the interface of such algorithms, or to perform a holistic comparison of their capabilities. This is a problem since different SLAM applications can have different functional and non-functional requirements. For example, a mobile phonebased AR application has a tight energy budget, while a UAV navigation system usually requires high accuracy. SLAMBench2 is a benchmarking framework to evaluate existing and future SLAM systems, both open and close source, over an extensible list of datasets, while using a comparable and clearly specified list of performance metrics. A wide variety of existing SLAM algorithms and datasets is supported, e.g. ElasticFusion, InfiniTAM, ORB-SLAM2, OKVIS, and integrating new ones is straightforward and clearly specified by the framework. SLAMBench2 is a publicly-available software framework which represents a starting point for quantitative, comparable and validatable experimental research to investigate trade-offs across SLAM systems.
Navigating the Landscape for Real-time Localisation and Mapping for Robotics and Virtual and Augmented Reality
Aug 20, 2018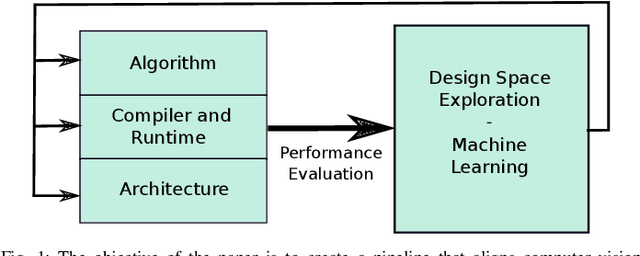

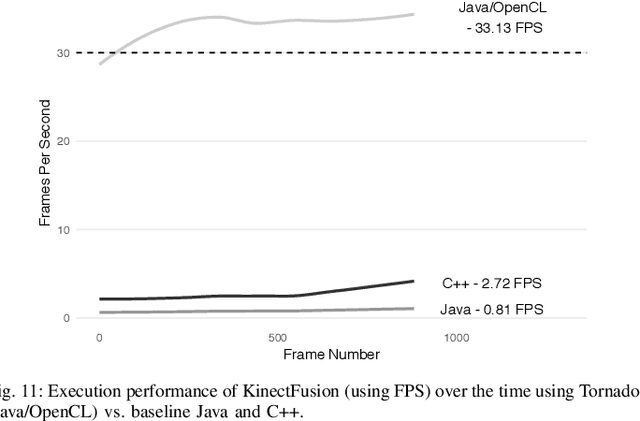
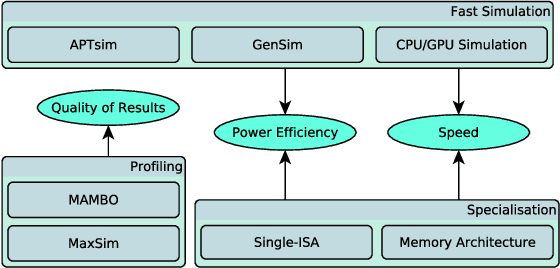
Visual understanding of 3D environments in real-time, at low power, is a huge computational challenge. Often referred to as SLAM (Simultaneous Localisation and Mapping), it is central to applications spanning domestic and industrial robotics, autonomous vehicles, virtual and augmented reality. This paper describes the results of a major research effort to assemble the algorithms, architectures, tools, and systems software needed to enable delivery of SLAM, by supporting applications specialists in selecting and configuring the appropriate algorithm and the appropriate hardware, and compilation pathway, to meet their performance, accuracy, and energy consumption goals. The major contributions we present are (1) tools and methodology for systematic quantitative evaluation of SLAM algorithms, (2) automated, machine-learning-guided exploration of the algorithmic and implementation design space with respect to multiple objectives, (3) end-to-end simulation tools to enable optimisation of heterogeneous, accelerated architectures for the specific algorithmic requirements of the various SLAM algorithmic approaches, and (4) tools for delivering, where appropriate, accelerated, adaptive SLAM solutions in a managed, JIT-compiled, adaptive runtime context.