 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNavigating the Landscape for Real-time Localisation and Mapping for Robotics and Virtual and Augmented Reality
Aug 20, 2018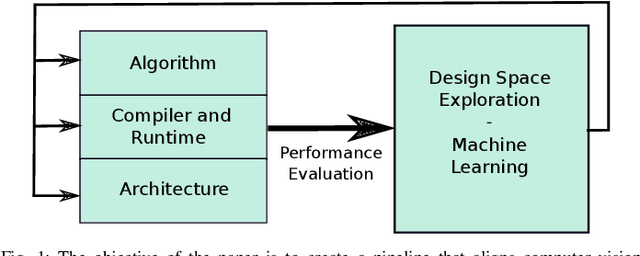

Visual understanding of 3D environments in real-time, at low power, is a huge computational challenge. Often referred to as SLAM (Simultaneous Localisation and Mapping), it is central to applications spanning domestic and industrial robotics, autonomous vehicles, virtual and augmented reality. This paper describes the results of a major research effort to assemble the algorithms, architectures, tools, and systems software needed to enable delivery of SLAM, by supporting applications specialists in selecting and configuring the appropriate algorithm and the appropriate hardware, and compilation pathway, to meet their performance, accuracy, and energy consumption goals. The major contributions we present are (1) tools and methodology for systematic quantitative evaluation of SLAM algorithms, (2) automated, machine-learning-guided exploration of the algorithmic and implementation design space with respect to multiple objectives, (3) end-to-end simulation tools to enable optimisation of heterogeneous, accelerated architectures for the specific algorithmic requirements of the various SLAM algorithmic approaches, and (4) tools for delivering, where appropriate, accelerated, adaptive SLAM solutions in a managed, JIT-compiled, adaptive runtime context.
Introducing SLAMBench, a performance and accuracy benchmarking methodology for SLAM
Feb 26, 2015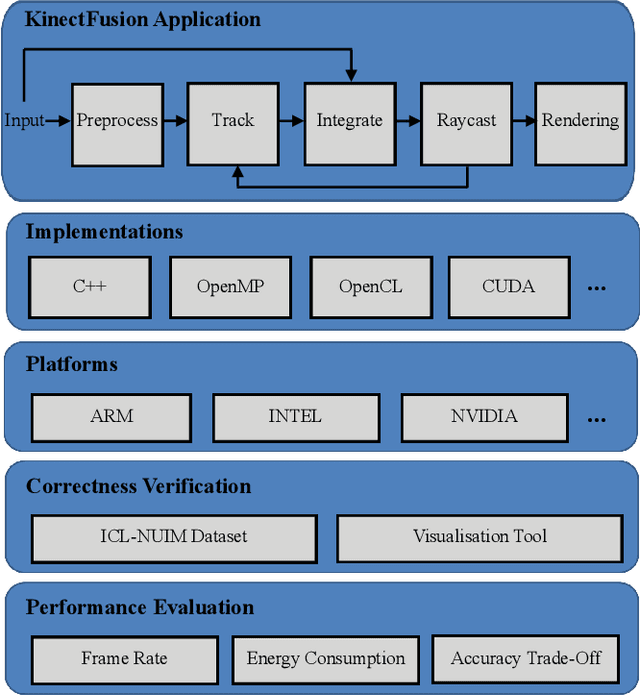

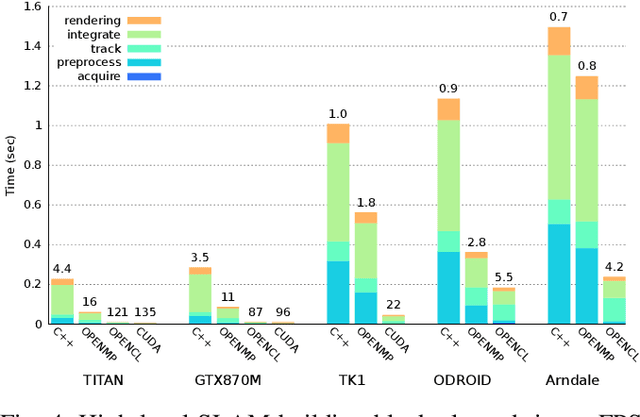
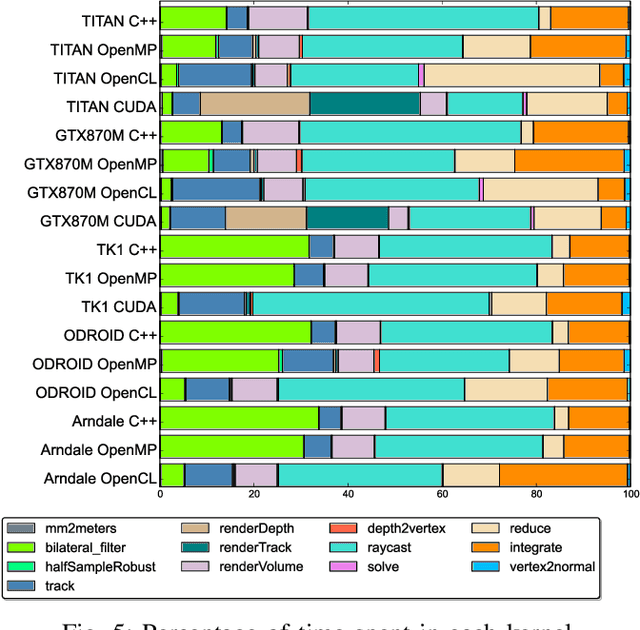
Real-time dense computer vision and SLAM offer great potential for a new level of scene modelling, tracking and real environmental interaction for many types of robot, but their high computational requirements mean that use on mass market embedded platforms is challenging. Meanwhile, trends in low-cost, low-power processing are towards massive parallelism and heterogeneity, making it difficult for robotics and vision researchers to implement their algorithms in a performance-portable way. In this paper we introduce SLAMBench, a publicly-available software framework which represents a starting point for quantitative, comparable and validatable experimental research to investigate trade-offs in performance, accuracy and energy consumption of a dense RGB-D SLAM system. SLAMBench provides a KinectFusion implementation in C++, OpenMP, OpenCL and CUDA, and harnesses the ICL-NUIM dataset of synthetic RGB-D sequences with trajectory and scene ground truth for reliable accuracy comparison of different implementation and algorithms. We present an analysis and breakdown of the constituent algorithmic elements of KinectFusion, and experimentally investigate their execution time on a variety of multicore and GPUaccelerated platforms. For a popular embedded platform, we also present an analysis of energy efficiency for different configuration alternatives.
* 8 pages, ICRA 2015 conference paper