 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSLAMBench2: Multi-Objective Head-to-Head Benchmarking for Visual SLAM
Aug 21, 2018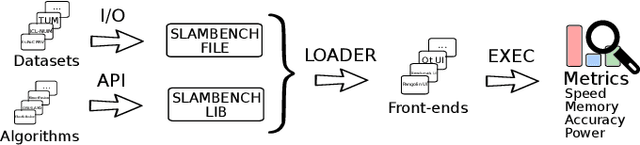
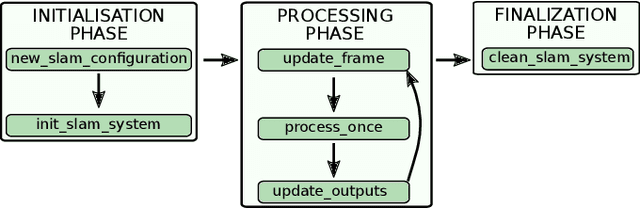

SLAM is becoming a key component of robotics and augmented reality (AR) systems. While a large number of SLAM algorithms have been presented, there has been little effort to unify the interface of such algorithms, or to perform a holistic comparison of their capabilities. This is a problem since different SLAM applications can have different functional and non-functional requirements. For example, a mobile phonebased AR application has a tight energy budget, while a UAV navigation system usually requires high accuracy. SLAMBench2 is a benchmarking framework to evaluate existing and future SLAM systems, both open and close source, over an extensible list of datasets, while using a comparable and clearly specified list of performance metrics. A wide variety of existing SLAM algorithms and datasets is supported, e.g. ElasticFusion, InfiniTAM, ORB-SLAM2, OKVIS, and integrating new ones is straightforward and clearly specified by the framework. SLAMBench2 is a publicly-available software framework which represents a starting point for quantitative, comparable and validatable experimental research to investigate trade-offs across SLAM systems.
Navigating the Landscape for Real-time Localisation and Mapping for Robotics and Virtual and Augmented Reality
Aug 20, 2018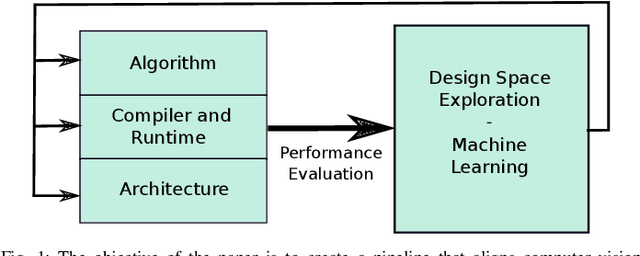

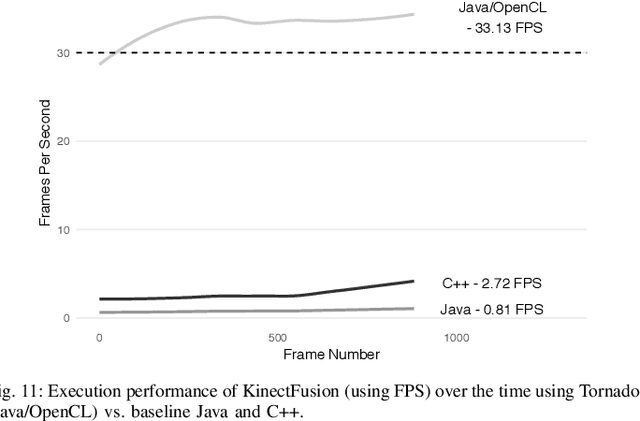
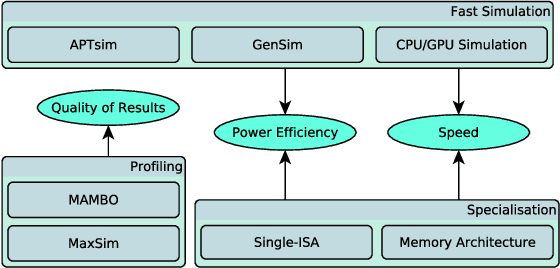
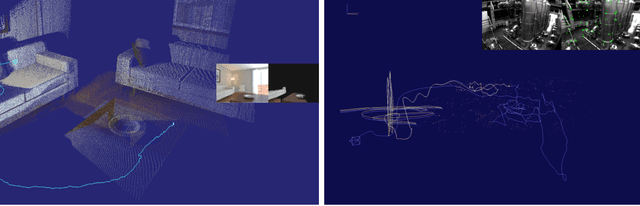
Visual understanding of 3D environments in real-time, at low power, is a huge computational challenge. Often referred to as SLAM (Simultaneous Localisation and Mapping), it is central to applications spanning domestic and industrial robotics, autonomous vehicles, virtual and augmented reality. This paper describes the results of a major research effort to assemble the algorithms, architectures, tools, and systems software needed to enable delivery of SLAM, by supporting applications specialists in selecting and configuring the appropriate algorithm and the appropriate hardware, and compilation pathway, to meet their performance, accuracy, and energy consumption goals. The major contributions we present are (1) tools and methodology for systematic quantitative evaluation of SLAM algorithms, (2) automated, machine-learning-guided exploration of the algorithmic and implementation design space with respect to multiple objectives, (3) end-to-end simulation tools to enable optimisation of heterogeneous, accelerated architectures for the specific algorithmic requirements of the various SLAM algorithmic approaches, and (4) tools for delivering, where appropriate, accelerated, adaptive SLAM solutions in a managed, JIT-compiled, adaptive runtime context.