 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning in Deep Factor Graphs with Gaussian Belief Propagation
Nov 24, 2023We propose an approach to do learning in Gaussian factor graphs. We treat all relevant quantities (inputs, outputs, parameters, latents) as random variables in a graphical model, and view both training and prediction as inference problems with different observed nodes. Our experiments show that these problems can be efficiently solved with belief propagation (BP), whose updates are inherently local, presenting exciting opportunities for distributed and asynchronous training. Our approach can be scaled to deep networks and provides a natural means to do continual learning: use the BP-estimated parameter marginals of the current task as parameter priors for the next. On a video denoising task we demonstrate the benefit of learnable parameters over a classical factor graph approach and we show encouraging performance of deep factor graphs for continual image classification on MNIST.
SLAMBench2: Multi-Objective Head-to-Head Benchmarking for Visual SLAM
Aug 21, 2018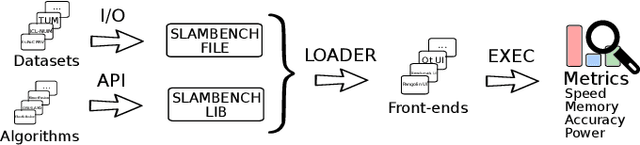
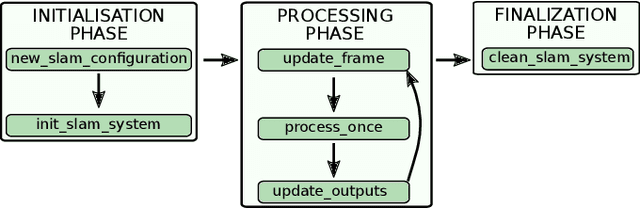
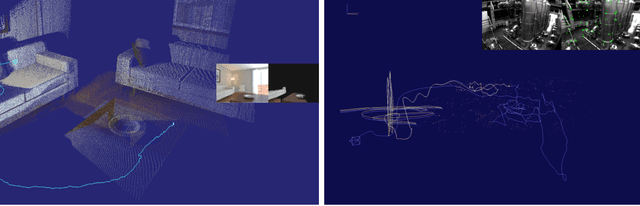

SLAM is becoming a key component of robotics and augmented reality (AR) systems. While a large number of SLAM algorithms have been presented, there has been little effort to unify the interface of such algorithms, or to perform a holistic comparison of their capabilities. This is a problem since different SLAM applications can have different functional and non-functional requirements. For example, a mobile phonebased AR application has a tight energy budget, while a UAV navigation system usually requires high accuracy. SLAMBench2 is a benchmarking framework to evaluate existing and future SLAM systems, both open and close source, over an extensible list of datasets, while using a comparable and clearly specified list of performance metrics. A wide variety of existing SLAM algorithms and datasets is supported, e.g. ElasticFusion, InfiniTAM, ORB-SLAM2, OKVIS, and integrating new ones is straightforward and clearly specified by the framework. SLAMBench2 is a publicly-available software framework which represents a starting point for quantitative, comparable and validatable experimental research to investigate trade-offs across SLAM systems.