 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSystematic Comparison of Path Planning Algorithms using PathBench
Mar 07, 2022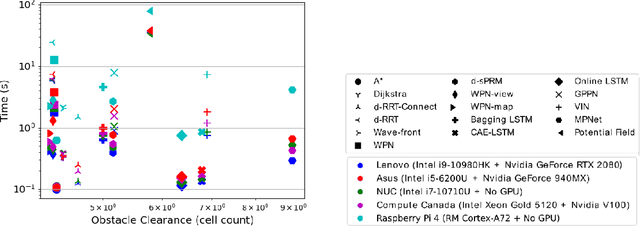
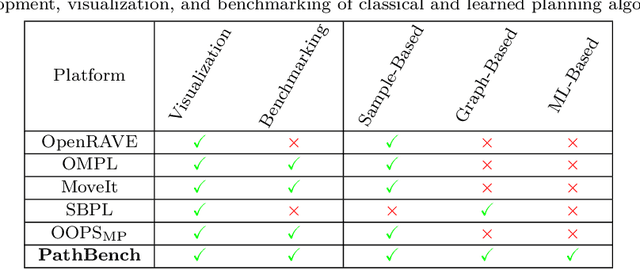
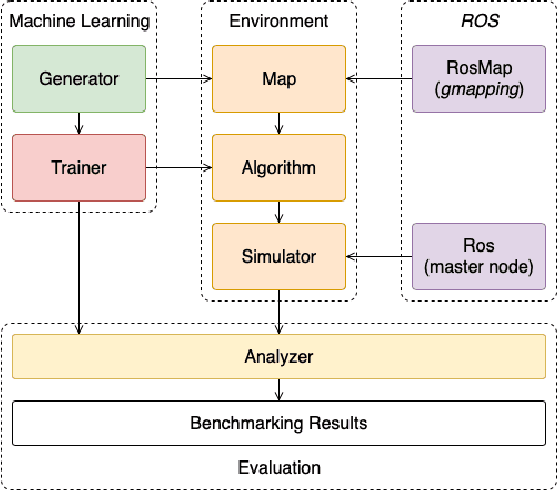
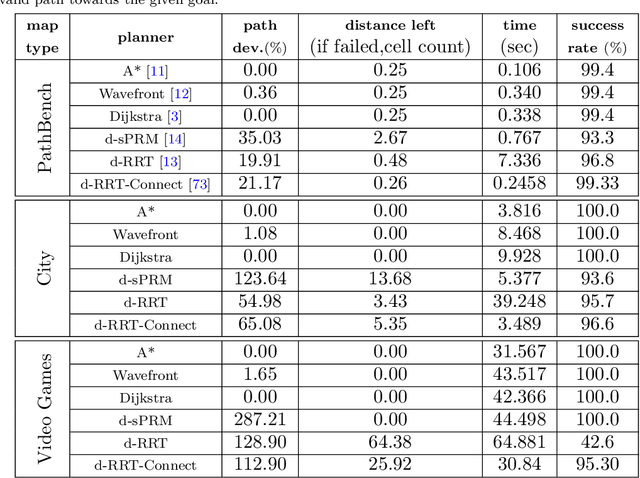
Path planning is an essential component of mobile robotics. Classical path planning algorithms, such as wavefront and rapidly-exploring random tree (RRT) are used heavily in autonomous robots. With the recent advances in machine learning, development of learning-based path planning algorithms has been experiencing rapid growth. An unified path planning interface that facilitates the development and benchmarking of existing and new algorithms is needed. This paper presents PathBench, a platform for developing, visualizing, training, testing, and benchmarking of existing and future, classical and learning-based path planning algorithms in 2D and 3D grid world environments. Many existing path planning algorithms are supported; e.g. A*, Dijkstra, waypoint planning networks, value iteration networks, gated path planning networks; and integrating new algorithms is easy and clearly specified. The benchmarking ability of PathBench is explored in this paper by comparing algorithms across five different hardware systems and three different map types, including built-in PathBench maps, video game maps, and maps from real world databases. Metrics, such as path length, success rate, and computational time, were used to evaluate algorithms. Algorithmic analysis was also performed on a real world robot to demonstrate PathBench's support for Robot Operating System (ROS). PathBench is open source.
PathBench: A Benchmarking Platform for Classical and Learned Path Planning Algorithms
May 04, 2021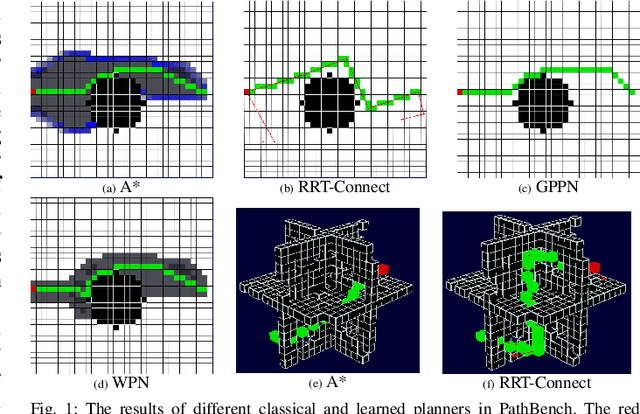
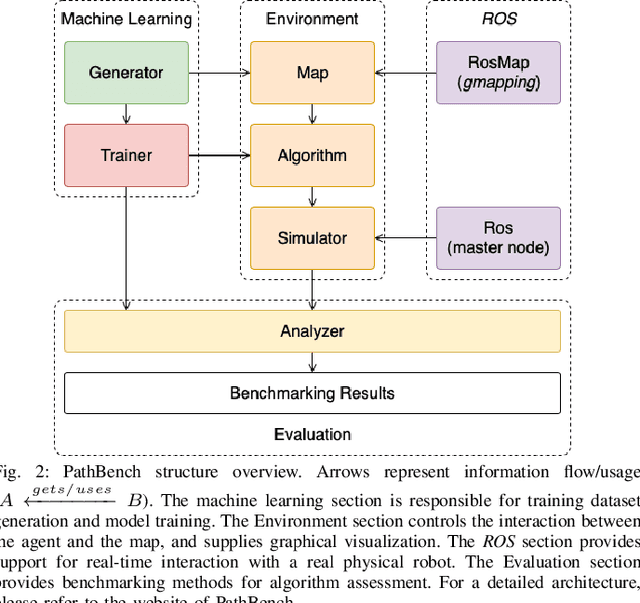
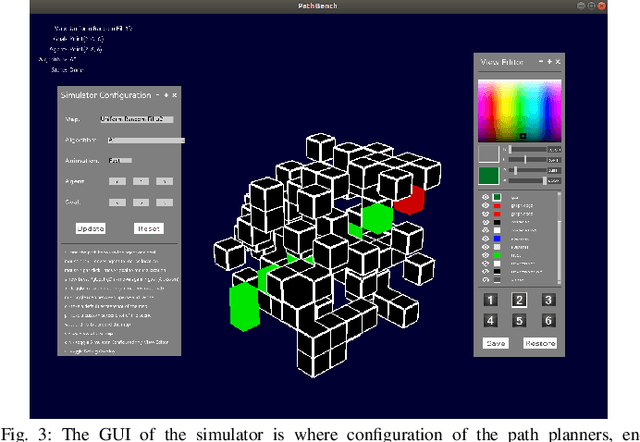
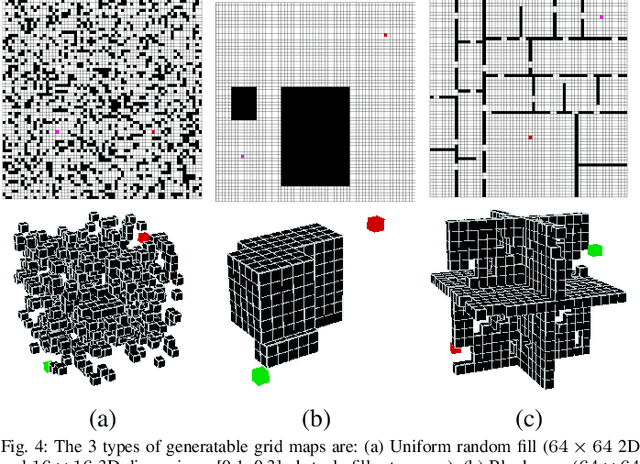
Path planning is a key component in mobile robotics. A wide range of path planning algorithms exist, but few attempts have been made to benchmark the algorithms holistically or unify their interface. Moreover, with the recent advances in deep neural networks, there is an urgent need to facilitate the development and benchmarking of such learning-based planning algorithms. This paper presents PathBench, a platform for developing, visualizing, training, testing, and benchmarking of existing and future, classical and learned 2D and 3D path planning algorithms, while offering support for Robot Oper-ating System (ROS). Many existing path planning algorithms are supported; e.g. A*, wavefront, rapidly-exploring random tree, value iteration networks, gated path planning networks; and integrating new algorithms is easy and clearly specified. We demonstrate the benchmarking capability of PathBench by comparing implemented classical and learned algorithms for metrics, such as path length, success rate, computational time and path deviation. These evaluations are done on built-in PathBench maps and external path planning environments from video games and real world databases. PathBench is open source.
Waypoint Planning Networks
May 01, 2021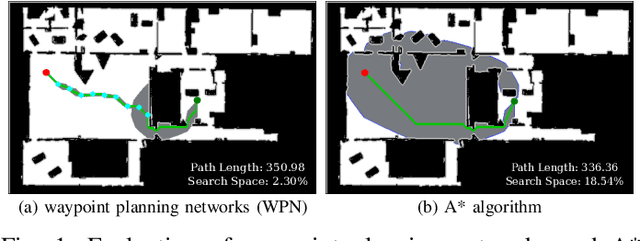
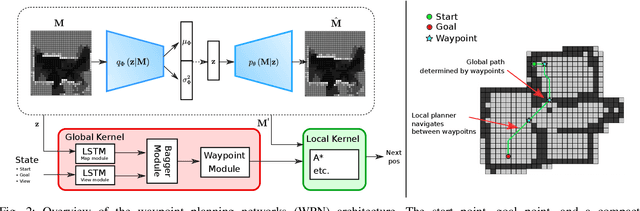
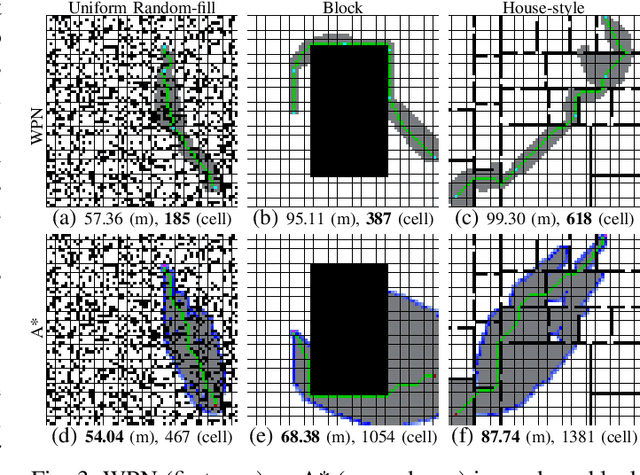
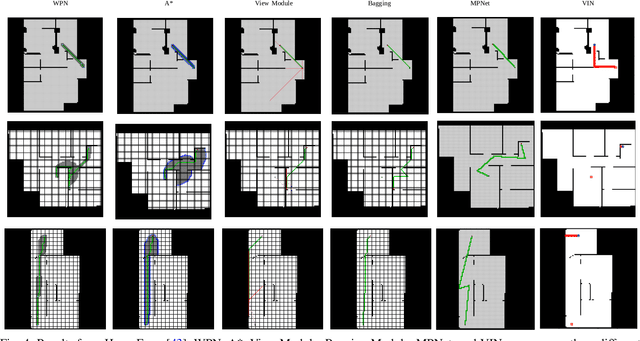
With the recent advances in machine learning, path planning algorithms are also evolving; however, the learned path planning algorithms often have difficulty competing with success rates of classic algorithms. We propose waypoint planning networks (WPN), a hybrid algorithm based on LSTMs with a local kernel - a classic algorithm such as A*, and a global kernel using a learned algorithm. WPN produces a more computationally efficient and robust solution. We compare WPN against A*, as well as related works including motion planning networks (MPNet) and value iteration networks (VIN). In this paper, the design and experiments have been conducted for 2D environments. Experimental results outline the benefits of WPN, both in efficiency and generalization. It is shown that WPN's search space is considerably less than A*, while being able to generate near optimal results. Additionally, WPN works on partial maps, unlike A* which needs the full map in advance. The code is available online.