 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSystematic Comparison of Path Planning Algorithms using PathBench
Mar 07, 2022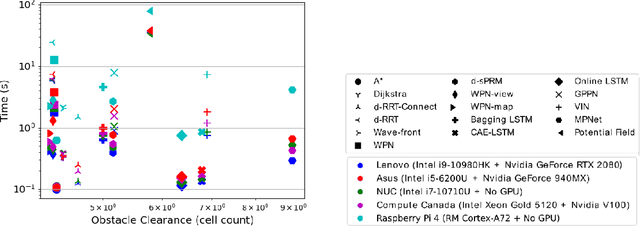
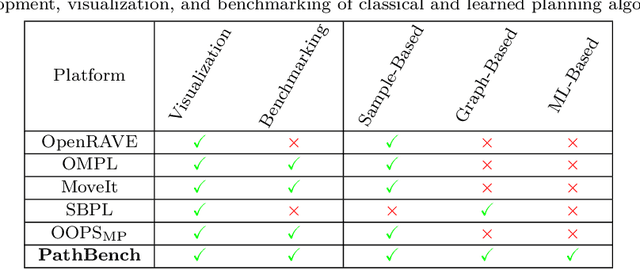
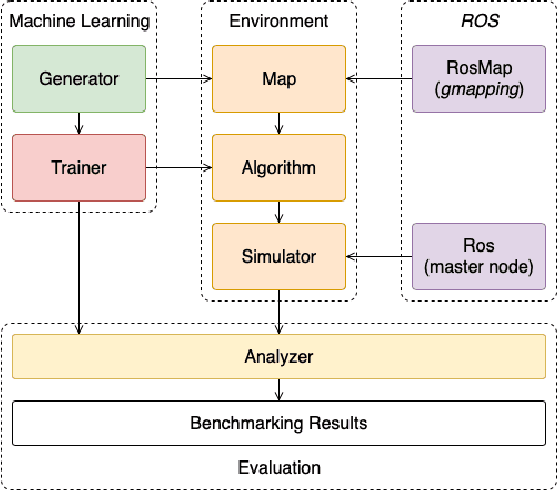
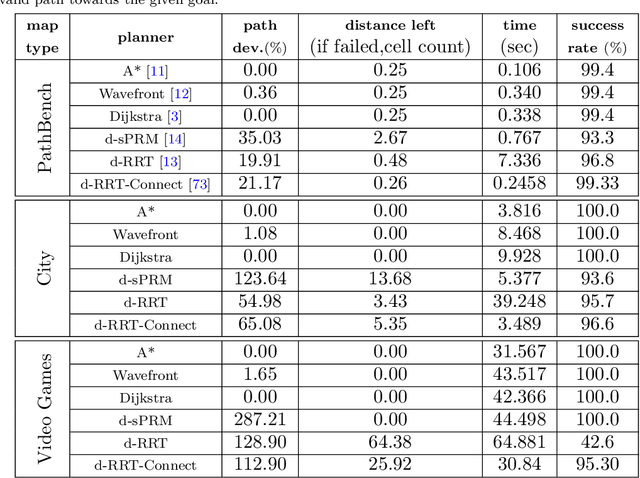
Path planning is an essential component of mobile robotics. Classical path planning algorithms, such as wavefront and rapidly-exploring random tree (RRT) are used heavily in autonomous robots. With the recent advances in machine learning, development of learning-based path planning algorithms has been experiencing rapid growth. An unified path planning interface that facilitates the development and benchmarking of existing and new algorithms is needed. This paper presents PathBench, a platform for developing, visualizing, training, testing, and benchmarking of existing and future, classical and learning-based path planning algorithms in 2D and 3D grid world environments. Many existing path planning algorithms are supported; e.g. A*, Dijkstra, waypoint planning networks, value iteration networks, gated path planning networks; and integrating new algorithms is easy and clearly specified. The benchmarking ability of PathBench is explored in this paper by comparing algorithms across five different hardware systems and three different map types, including built-in PathBench maps, video game maps, and maps from real world databases. Metrics, such as path length, success rate, and computational time, were used to evaluate algorithms. Algorithmic analysis was also performed on a real world robot to demonstrate PathBench's support for Robot Operating System (ROS). PathBench is open source.
Cain: Automatic Code Generation for Simultaneous Convolutional Kernels on Focal-plane Sensor-processors
Jan 21, 2021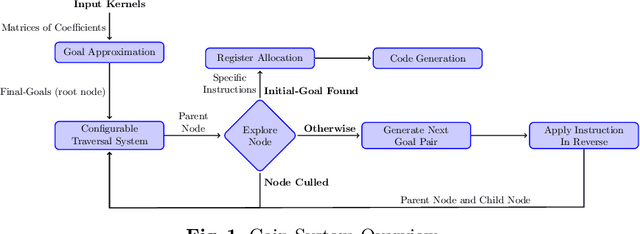
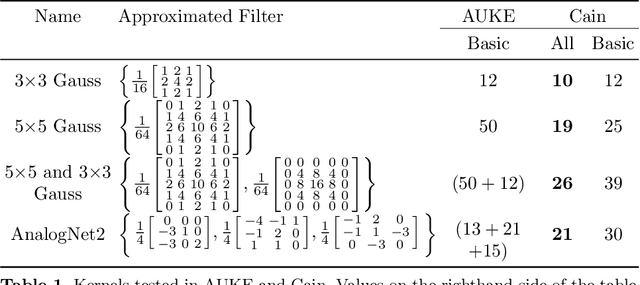
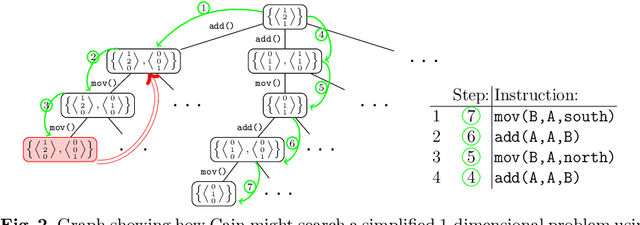
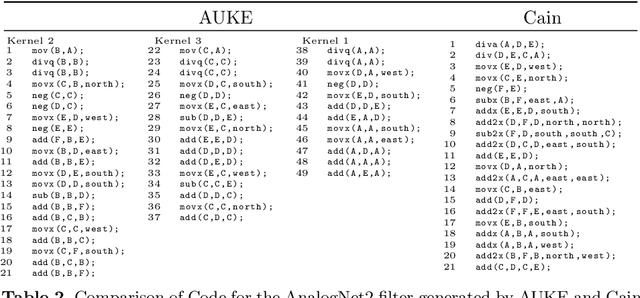
Focal-plane Sensor-processors (FPSPs) are a camera technology that enable low power, high frame rate computation, making them suitable for edge computation. Unfortunately, these devices' limited instruction sets and registers make developing complex algorithms difficult. In this work, we present Cain - a compiler that targets SCAMP-5, a general-purpose FPSP - which generates code from multiple convolutional kernels. As an example, given the convolutional kernels for an MNIST digit recognition neural network, Cain produces code that is half as long, when compared to the other available compilers for SCAMP-5.