 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDUNE: Distilling a Universal Encoder from Heterogeneous 2D and 3D Teachers
Mar 18, 2025Recent multi-teacher distillation methods have unified the encoders of multiple foundation models into a single encoder, achieving competitive performance on core vision tasks like classification, segmentation, and depth estimation. This led us to ask: Could similar success be achieved when the pool of teachers also includes vision models specialized in diverse tasks across both 2D and 3D perception? In this paper, we define and investigate the problem of heterogeneous teacher distillation, or co-distillation, a challenging multi-teacher distillation scenario where teacher models vary significantly in both (a) their design objectives and (b) the data they were trained on. We explore data-sharing strategies and teacher-specific encoding, and introduce DUNE, a single encoder excelling in 2D vision, 3D understanding, and 3D human perception. Our model achieves performance comparable to that of its larger teachers, sometimes even outperforming them, on their respective tasks. Notably, DUNE surpasses MASt3R in Map-free Visual Relocalization with a much smaller encoder.
Placing Objects in Context via Inpainting for Out-of-distribution Segmentation
Feb 26, 2024When deploying a semantic segmentation model into the real world, it will inevitably be confronted with semantic classes unseen during training. Thus, to safely deploy such systems, it is crucial to accurately evaluate and improve their anomaly segmentation capabilities. However, acquiring and labelling semantic segmentation data is expensive and unanticipated conditions are long-tail and potentially hazardous. Indeed, existing anomaly segmentation datasets capture a limited number of anomalies, lack realism or have strong domain shifts. In this paper, we propose the Placing Objects in Context (POC) pipeline to realistically add any object into any image via diffusion models. POC can be used to easily extend any dataset with an arbitrary number of objects. In our experiments, we present different anomaly segmentation datasets based on POC-generated data and show that POC can improve the performance of recent state-of-the-art anomaly fine-tuning methods in several standardized benchmarks. POC is also effective to learn new classes. For example, we use it to edit Cityscapes samples by adding a subset of Pascal classes and show that models trained on such data achieve comparable performance to the Pascal-trained baseline. This corroborates the low sim-to-real gap of models trained on POC-generated images.
A Survey on Transferability of Adversarial Examples across Deep Neural Networks
Oct 26, 2023

The emergence of Deep Neural Networks (DNNs) has revolutionized various domains, enabling the resolution of complex tasks spanning image recognition, natural language processing, and scientific problem-solving. However, this progress has also exposed a concerning vulnerability: adversarial examples. These crafted inputs, imperceptible to humans, can manipulate machine learning models into making erroneous predictions, raising concerns for safety-critical applications. An intriguing property of this phenomenon is the transferability of adversarial examples, where perturbations crafted for one model can deceive another, often with a different architecture. This intriguing property enables "black-box" attacks, circumventing the need for detailed knowledge of the target model. This survey explores the landscape of the adversarial transferability of adversarial examples. We categorize existing methodologies to enhance adversarial transferability and discuss the fundamental principles guiding each approach. While the predominant body of research primarily concentrates on image classification, we also extend our discussion to encompass other vision tasks and beyond. Challenges and future prospects are discussed, highlighting the importance of fortifying DNNs against adversarial vulnerabilities in an evolving landscape.
Reliability in Semantic Segmentation: Are We on the Right Track?
Mar 20, 2023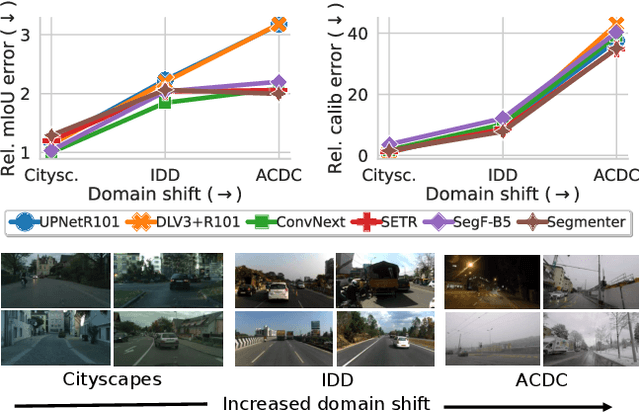
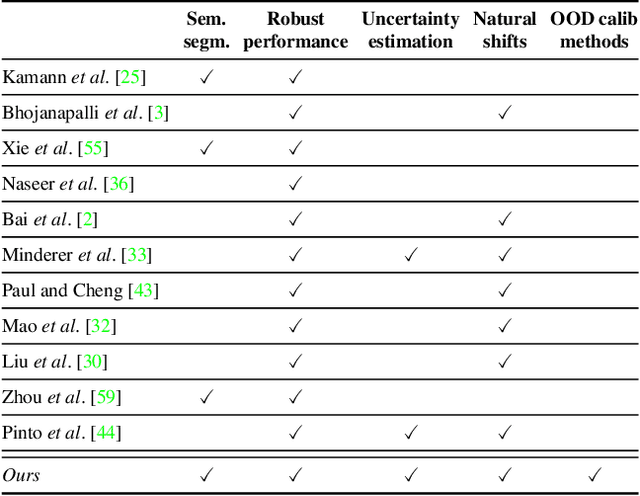
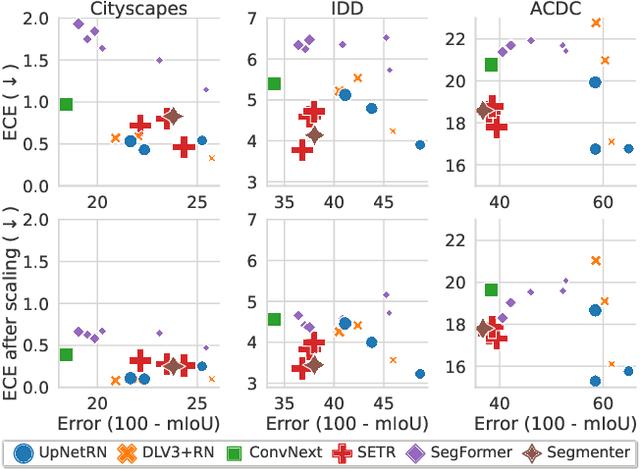
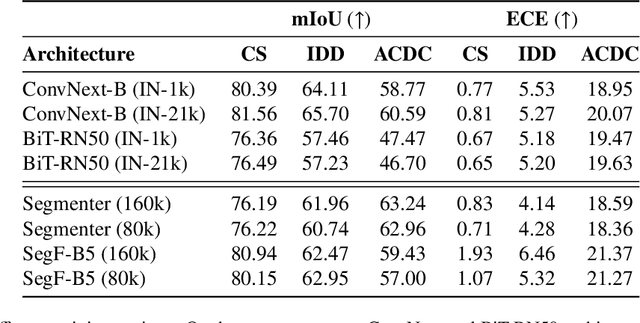
Motivated by the increasing popularity of transformers in computer vision, in recent times there has been a rapid development of novel architectures. While in-domain performance follows a constant, upward trend, properties like robustness or uncertainty estimation are less explored -leaving doubts about advances in model reliability. Studies along these axes exist, but they are mainly limited to classification models. In contrast, we carry out a study on semantic segmentation, a relevant task for many real-world applications where model reliability is paramount. We analyze a broad variety of models, spanning from older ResNet-based architectures to novel transformers and assess their reliability based on four metrics: robustness, calibration, misclassification detection and out-of-distribution (OOD) detection. We find that while recent models are significantly more robust, they are not overall more reliable in terms of uncertainty estimation. We further explore methods that can come to the rescue and show that improving calibration can also help with other uncertainty metrics such as misclassification or OOD detection. This is the first study on modern segmentation models focused on both robustness and uncertainty estimation and we hope it will help practitioners and researchers interested in this fundamental vision task. Code available at https://github.com/naver/relis.
Catastrophic overfitting is a bug but also a feature
Jun 16, 2022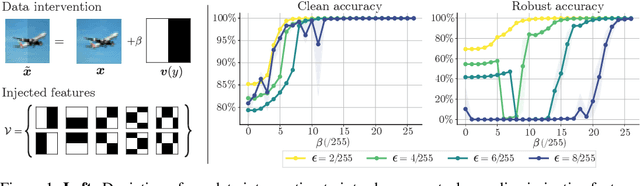
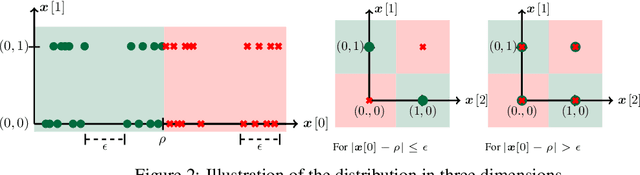

Despite clear computational advantages in building robust neural networks, adversarial training (AT) using single-step methods is unstable as it suffers from catastrophic overfitting (CO): Networks gain non-trivial robustness during the first stages of adversarial training, but suddenly reach a breaking point where they quickly lose all robustness in just a few iterations. Although some works have succeeded at preventing CO, the different mechanisms that lead to this remarkable failure mode are still poorly understood. In this work, however, we find that the interplay between the structure of the data and the dynamics of AT plays a fundamental role in CO. Specifically, through active interventions on typical datasets of natural images, we establish a causal link between the structure of the data and the onset of CO in single-step AT methods. This new perspective provides important insights into the mechanisms that lead to CO and paves the way towards a better understanding of the general dynamics of robust model construction. The code to reproduce the experiments of this paper can be found at https://github.com/gortizji/co_features .
On the Road to Online Adaptation for Semantic Image Segmentation
Mar 30, 2022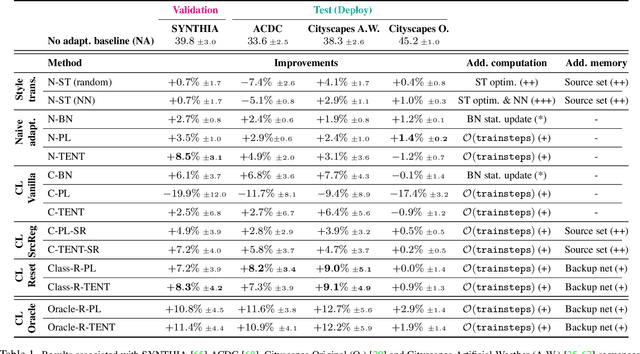
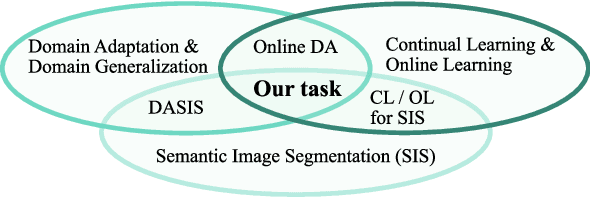
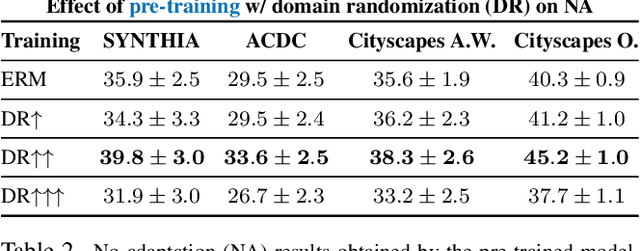
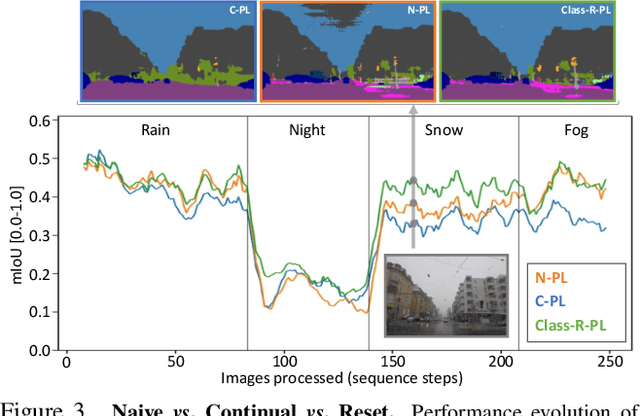
We propose a new problem formulation and a corresponding evaluation framework to advance research on unsupervised domain adaptation for semantic image segmentation. The overall goal is fostering the development of adaptive learning systems that will continuously learn, without supervision, in ever-changing environments. Typical protocols that study adaptation algorithms for segmentation models are limited to few domains, adaptation happens offline, and human intervention is generally required, at least to annotate data for hyper-parameter tuning. We argue that such constraints are incompatible with algorithms that can continuously adapt to different real-world situations. To address this, we propose a protocol where models need to learn online, from sequences of temporally correlated images, requiring continuous, frame-by-frame adaptation. We accompany this new protocol with a variety of baselines to tackle the proposed formulation, as well as an extensive analysis of their behaviors, which can serve as a starting point for future research.
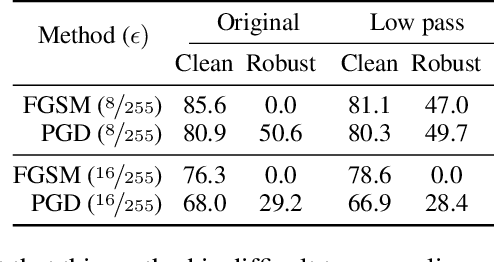
Make Some Noise: Reliable and Efficient Single-Step Adversarial Training
Feb 02, 2022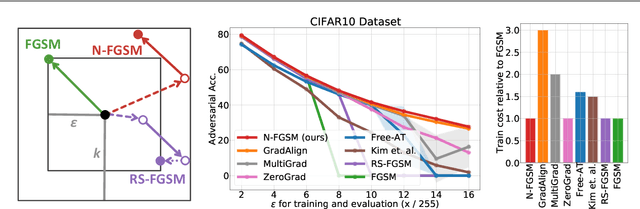
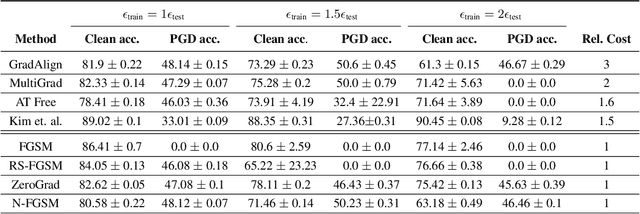
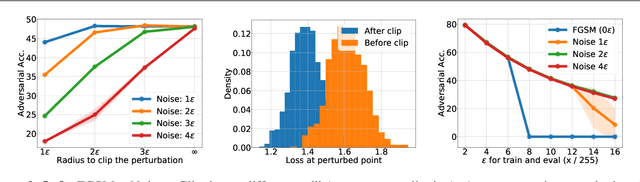
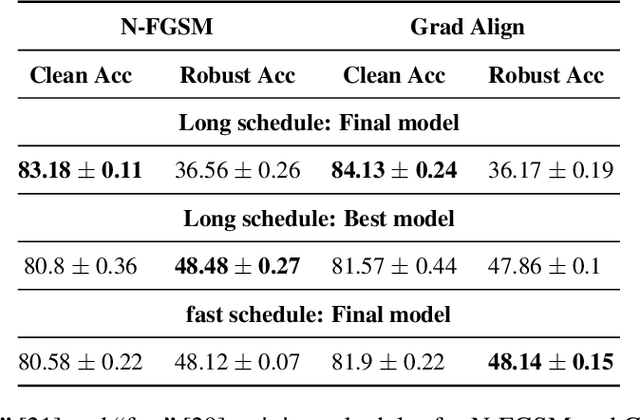
Recently, Wong et al. showed that adversarial training with single-step FGSM leads to a characteristic failure mode named catastrophic overfitting (CO), in which a model becomes suddenly vulnerable to multi-step attacks. They showed that adding a random perturbation prior to FGSM (RS-FGSM) seemed to be sufficient to prevent CO. However, Andriushchenko and Flammarion observed that RS-FGSM still leads to CO for larger perturbations, and proposed an expensive regularizer (GradAlign) to avoid CO. In this work, we methodically revisit the role of noise and clipping in single-step adversarial training. Contrary to previous intuitions, we find that using a stronger noise around the clean sample combined with not clipping is highly effective in avoiding CO for large perturbation radii. Based on these observations, we then propose Noise-FGSM (N-FGSM) that, while providing the benefits of single-step adversarial training, does not suffer from CO. Empirical analyses on a large suite of experiments show that N-FGSM is able to match or surpass the performance of previous single-step methods while achieving a 3$\times$ speed-up.
Progressive Skeletonization: Trimming more fat from a network at initialization
Jul 14, 2020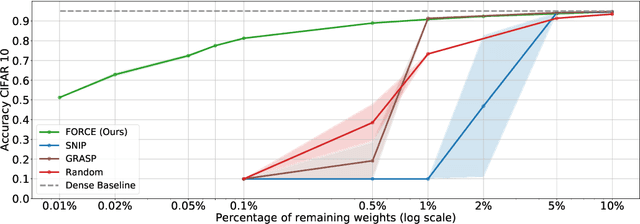
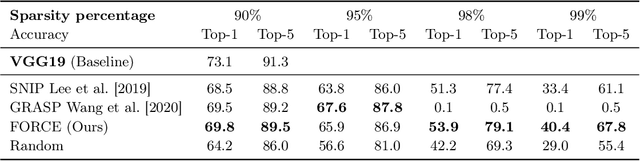
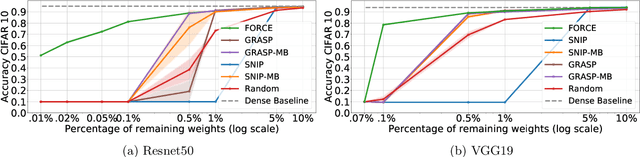
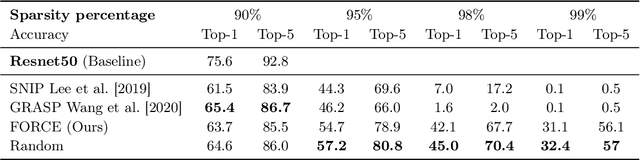
Recent studies have shown that skeletonization (pruning parameters) of networks at initialization provides all the practical benefits of sparsity both at inference and training time, while only marginally degrading their performance. However, we observe that beyond a certain level of sparsity (approx 95%), these approaches fail to preserve the network performance, and to our surprise, in many cases perform even worse than trivial random pruning. To this end, we propose to find a skeletonized network with maximum foresight connection sensitivity (FORCE). Intuitively, out of all possible sub-networks, we propose to find the one whose connections would have a maximum impact on the loss when perturbed. Our approximate solution to maximize the FORCE, progressively prunes connections of a given network at initialization. This allows parameters that were unimportant at earlier stages of skeletonization to become important at later stages. In many cases, our approach enables us to remove up to 99.9% parameters, while keeping networks trainable and providing significantly better performance than recent approaches. We demonstrate the effectiveness of our approach at various levels of sparsity (from medium to extreme) through extensive experiments and analysis. Code can be found in https://github.com/naver/force.