 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStreamOV: Streaming Omni-Video Understanding via Evidence-Guided Memory and Response Triggering
May 25, 2026While streaming omni-video understanding demands continuous perception and proactive, real-time interaction, this crucial area remains largely under-explored. Current omni-modal methods are inherently designed for offline settings, limiting their applicability in streaming scenarios due to two fundamental flaws. First, they lack robust mechanisms to manage continuously growing audio-visual context over long horizons and cannot autonomously initiate responses at opportune moments. Second, existing benchmarks are predominantly confined to offline, single-turn question answering, failing to capture continuous, multi-turn streaming interactions. To bridge these gaps, we propose StreamOV, a novel Streaming Omni-Video understanding framework for efficient online audio-visual reasoning with bounded memory and proactive response triggering. Specifically, StreamOV introduces a multimodal evidence-guided long-short term memory that condenses historical audio-visual context into compact informative evidence under a fixed budget. It further employs a hidden-state-driven trigger to decide when to respond, avoiding explicit silence-token generation and external routers. We also curate SOVBench, the first comprehensive benchmark for online, multi-turn omni-modal evaluation. Extensive experiments show that StreamOV achieves state-of-the-art performance across diverse streaming and omni-video benchmarks, demonstrating its effectiveness for both online and offline video understanding.
VidSplice: Towards Coherent Video Inpainting via Explicit Spaced Frame Guidance
Oct 24, 2025Recent video inpainting methods often employ image-to-video (I2V) priors to model temporal consistency across masked frames. While effective in moderate cases, these methods struggle under severe content degradation and tend to overlook spatiotemporal stability, resulting in insufficient control over the latter parts of the video. To address these limitations, we decouple video inpainting into two sub-tasks: multi-frame consistent image inpainting and masked area motion propagation. We propose VidSplice, a novel framework that introduces spaced-frame priors to guide the inpainting process with spatiotemporal cues. To enhance spatial coherence, we design a CoSpliced Module to perform first-frame propagation strategy that diffuses the initial frame content into subsequent reference frames through a splicing mechanism. Additionally, we introduce a delicate context controller module that encodes coherent priors after frame duplication and injects the spliced video into the I2V generative backbone, effectively constraining content distortion during generation. Extensive evaluations demonstrate that VidSplice achieves competitive performance across diverse video inpainting scenarios. Moreover, its design significantly improves both foreground alignment and motion stability, outperforming existing approaches.
Large Language Model-driven Security Assistant for Internet of Things via Chain-of-Thought
May 08, 2025The rapid development of Internet of Things (IoT) technology has transformed people's way of life and has a profound impact on both production and daily activities. However, with the rapid advancement of IoT technology, the security of IoT devices has become an unavoidable issue in both research and applications. Although some efforts have been made to detect or mitigate IoT security vulnerabilities, they often struggle to adapt to the complexity of IoT environments, especially when dealing with dynamic security scenarios. How to automatically, efficiently, and accurately understand these vulnerabilities remains a challenge. To address this, we propose an IoT security assistant driven by Large Language Model (LLM), which enhances the LLM's understanding of IoT security vulnerabilities and related threats. The aim of the ICoT method we propose is to enable the LLM to understand security issues by breaking down the various dimensions of security vulnerabilities and generating responses tailored to the user's specific needs and expertise level. By incorporating ICoT, LLM can gradually analyze and reason through complex security scenarios, resulting in more accurate, in-depth, and personalized security recommendations and solutions. Experimental results show that, compared to methods relying solely on LLM, our proposed LLM-driven IoT security assistant significantly improves the understanding of IoT security issues through the ICoT approach and provides personalized solutions based on the user's identity, demonstrating higher accuracy and reliability.
Align, Perturb and Decouple: Toward Better Leverage of Difference Information for RSI Change Detection
May 30, 2023



Change detection is a widely adopted technique in remote sense imagery (RSI) analysis in the discovery of long-term geomorphic evolution. To highlight the areas of semantic changes, previous effort mostly pays attention to learning representative feature descriptors of a single image, while the difference information is either modeled with simple difference operations or implicitly embedded via feature interactions. Nevertheless, such difference modeling can be noisy since it suffers from non-semantic changes and lacks explicit guidance from image content or context. In this paper, we revisit the importance of feature difference for change detection in RSI, and propose a series of operations to fully exploit the difference information: Alignment, Perturbation and Decoupling (APD). Firstly, alignment leverages contextual similarity to compensate for the non-semantic difference in feature space. Next, a difference module trained with semantic-wise perturbation is adopted to learn more generalized change estimators, which reversely bootstraps feature extraction and prediction. Finally, a decoupled dual-decoder structure is designed to predict semantic changes in both content-aware and content-agnostic manners. Extensive experiments are conducted on benchmarks of LEVIR-CD, WHU-CD and DSIFN-CD, demonstrating our proposed operations bring significant improvement and achieve competitive results under similar comparative conditions. Code is available at https://github.com/wangsp1999/CD-Research/tree/main/openAPD
AutoDRIVE: A Comprehensive, Flexible and Integrated Cyber-Physical Ecosystem for Enhancing Autonomous Driving Research and Education
Dec 10, 2022Prototyping and validating hardware-software components, sub-systems and systems within the intelligent transportation system-of-systems framework requires a modular yet flexible and open-access ecosystem. This work presents our attempt towards developing such a comprehensive research and education ecosystem, called AutoDRIVE, for synergistically prototyping, simulating and deploying cyber-physical solutions pertaining to autonomous driving as well as smart city management. AutoDRIVE features both software as well as hardware-in-the-loop testing interfaces with openly accessible scaled vehicle and infrastructure components. The ecosystem is compatible with a variety of development frameworks, and supports both single and multi-agent paradigms through local as well as distributed computing. Most critically, AutoDRIVE is intended to be modularly expandable to explore emergent technologies, and this work highlights various complementary features and capabilities of the proposed ecosystem by demonstrating four such deployment use-cases: (i) autonomous parking using probabilistic robotics approach for mapping, localization, path planning and control; (ii) behavioral cloning using computer vision and deep imitation learning; (iii) intersection traversal using vehicle-to-vehicle communication and deep reinforcement learning; and (iv) smart city management using vehicle-to-infrastructure communication and internet-of-things.
Learning Distinctive Margin toward Active Domain Adaptation
Apr 03, 2022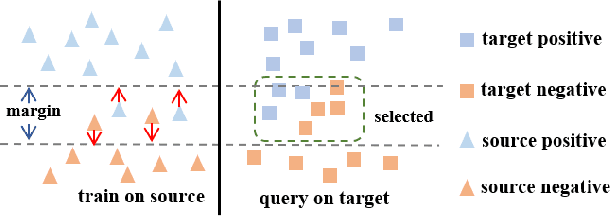
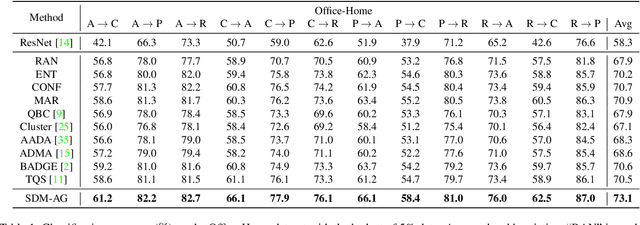
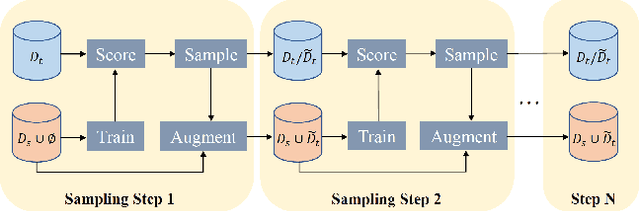
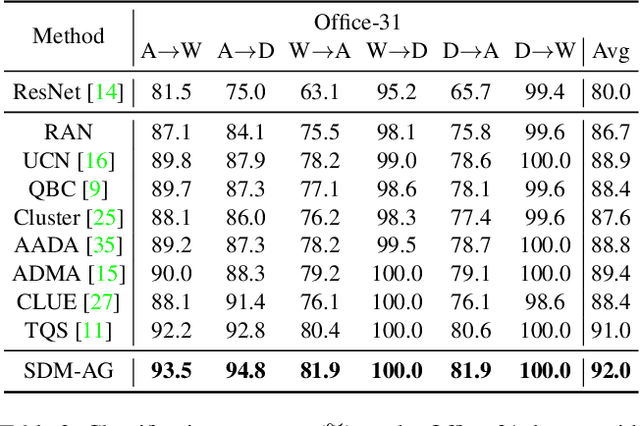
Despite plenty of efforts focusing on improving the domain adaptation ability (DA) under unsupervised or few-shot semi-supervised settings, recently the solution of active learning started to attract more attention due to its suitability in transferring model in a more practical way with limited annotation resource on target data. Nevertheless, most active learning methods are not inherently designed to handle domain gap between data distribution, on the other hand, some active domain adaptation methods (ADA) usually requires complicated query functions, which is vulnerable to overfitting. In this work, we propose a concise but effective ADA method called Select-by-Distinctive-Margin (SDM), which consists of a maximum margin loss and a margin sampling algorithm for data selection. We provide theoretical analysis to show that SDM works like a Support Vector Machine, storing hard examples around decision boundaries and exploiting them to find informative and transferable data. In addition, we propose two variants of our method, one is designed to adaptively adjust the gradient from margin loss, the other boosts the selectivity of margin sampling by taking the gradient direction into account. We benchmark SDM with standard active learning setting, demonstrating our algorithm achieves competitive results with good data scalability. Code is available at https://github.com/TencentYoutuResearch/ActiveLearning-SDM
Multi-Center Federated Learning
Aug 21, 2021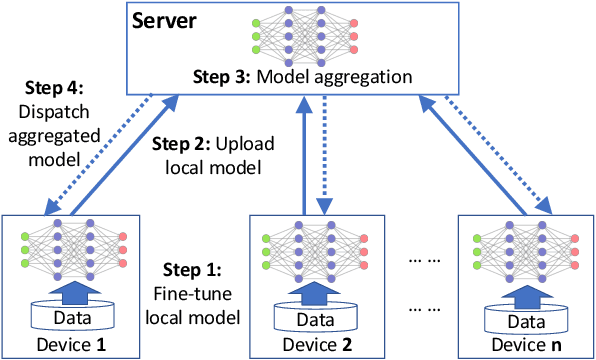
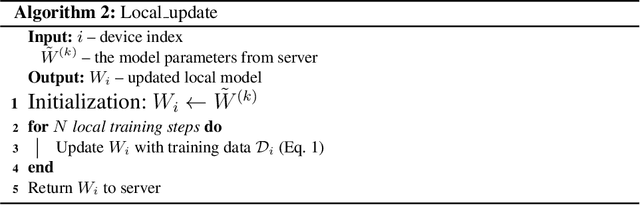
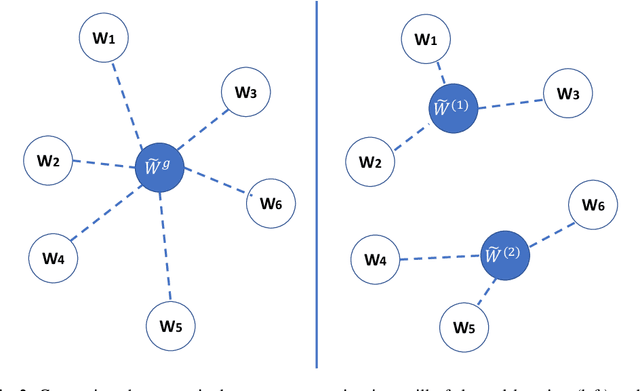
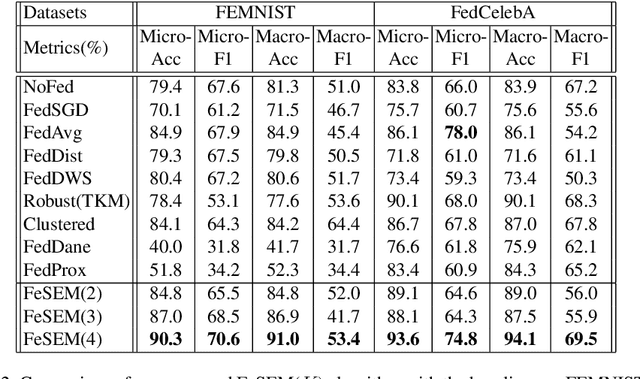
Federated learning (FL) can protect data privacy in distributed learning since it merely collects local gradients from users without access to their data. However, FL is fragile in the presence of heterogeneity that is commonly encountered in practical settings, e.g., non-IID data over different users. Existing FL approaches usually update a single global model to capture the shared knowledge of all users by aggregating their gradients, regardless of the discrepancy between their data distributions. By comparison, a mixture of multiple global models could capture the heterogeneity across various users if assigning the users to different global models (i.e., centers) in FL. To this end, we propose a novel multi-center aggregation mechanism . It learns multiple global models from data, and simultaneously derives the optimal matching between users and centers. We then formulate it as a bi-level optimization problem that can be efficiently solved by a stochastic expectation maximization (EM) algorithm. Experiments on multiple benchmark datasets of FL show that our method outperforms several popular FL competitors. The source code are open source on Github.
AutoDRIVE Simulator: A Simulator for Scaled Autonomous Vehicle Research and Education
Mar 18, 2021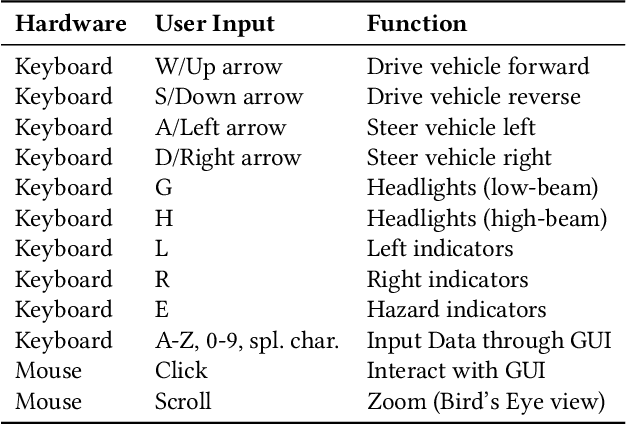
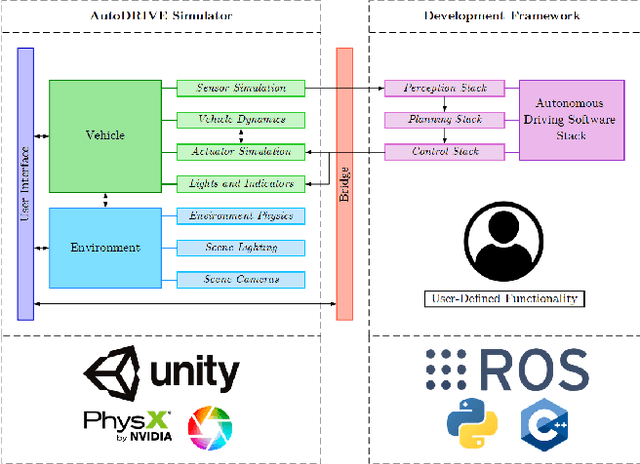
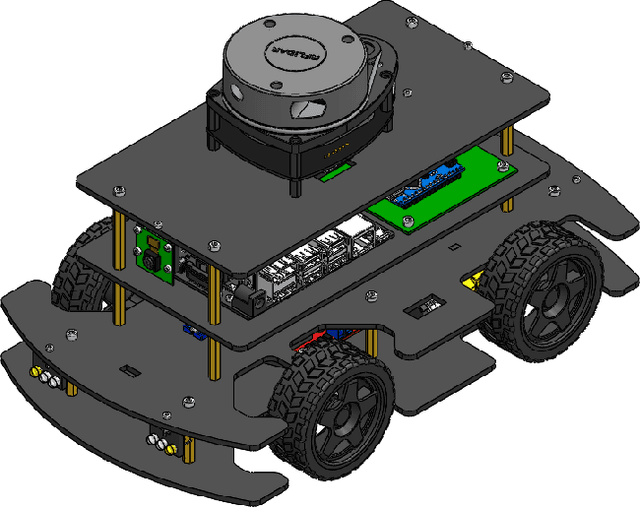
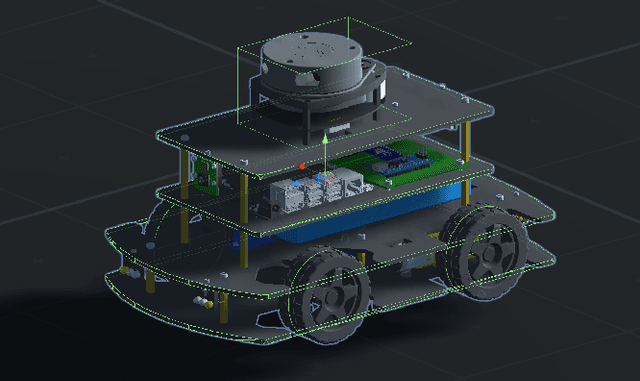
AutoDRIVE is envisioned to be an integrated research and education platform for scaled autonomous vehicles and related applications. This work is a stepping-stone towards achieving the greater goal of realizing such a platform. Particularly, this work introduces the AutoDRIVE Simulator, a high-fidelity simulator for scaled autonomous vehicles. The proposed simulation ecosystem is developed atop the Unity game engine, and exploits its features in order to simulate realistic system dynamics and render photorealistic graphics. It comprises of a scaled vehicle model equipped with a comprehensive sensor suite for redundant perception, a set of actuators for constrained motion control and a fully functional lighting system for illumination and signaling. It also provides a modular environment development kit, which comprises of various environment modules that aid in reconfigurable construction of the scene. Additionally, the simulator features a communication bridge in order to extend an interface to the autonomous driving software stack developed independently by the users. This work describes some of the prominent components of this simulation system along with some key features that it has to offer in order to accelerate education and research aimed at autonomous driving.