 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Future of Work to Future of Workers: Addressing Asymptomatic AI Harms for Dignified Human-AI Interaction
Jan 29, 2026In the future of work discourse, AI is touted as the ultimate productivity amplifier. Yet, beneath the efficiency gains lie subtle erosions of human expertise and agency. This paper shifts focus from the future of work to the future of workers by navigating the AI-as-Amplifier Paradox: AI's dual role as enhancer and eroder, simultaneously strengthening performance while eroding underlying expertise. We present a year-long study on the longitudinal use of AI in a high-stakes workplace among cancer specialists. Initial operational gains hid ``intuition rust'': the gradual dulling of expert judgment. These asymptomatic effects evolved into chronic harms, such as skill atrophy and identity commoditization. Building on these findings, we offer a framework for dignified Human-AI interaction co-constructed with professional knowledge workers facing AI-induced skill erosion without traditional labor protections. The framework operationalizes sociotechnical immunity through dual-purpose mechanisms that serve institutional quality goals while building worker power to detect, contain, and recover from skill erosion, and preserve human identity. Evaluated across healthcare and software engineering, our work takes a foundational step toward dignified human-AI interaction futures by balancing productivity with the preservation of human expertise.
AI Agents and the Law
Aug 12, 2025As AI becomes more "agentic," it faces technical and socio-legal issues it must address if it is to fulfill its promise of increased economic productivity and efficiency. This paper uses technical and legal perspectives to explain how things change when AI systems start being able to directly execute tasks on behalf of a user. We show how technical conceptions of agents track some, but not all, socio-legal conceptions of agency. That is, both computer science and the law recognize the problems of under-specification for an agent, and both disciplines have robust conceptions of how to address ensuring an agent does what the programmer, or in the law, the principal desires and no more. However, to date, computer science has under-theorized issues related to questions of loyalty and to third parties that interact with an agent, both of which are central parts of the law of agency. First, we examine the correlations between implied authority in agency law and the principle of value-alignment in AI, wherein AI systems must operate under imperfect objective specification. Second, we reveal gaps in the current computer science view of agents pertaining to the legal concepts of disclosure and loyalty, and how failure to account for them can result in unintended effects in AI ecommerce agents. In surfacing these gaps, we show a path forward for responsible AI agent development and deployment.
Explainable Reinforcement Learning Agents Using World Models
May 12, 2025Explainable AI (XAI) systems have been proposed to help people understand how AI systems produce outputs and behaviors. Explainable Reinforcement Learning (XRL) has an added complexity due to the temporal nature of sequential decision-making. Further, non-AI experts do not necessarily have the ability to alter an agent or its policy. We introduce a technique for using World Models to generate explanations for Model-Based Deep RL agents. World Models predict how the world will change when actions are performed, allowing for the generation of counterfactual trajectories. However, identifying what a user wanted the agent to do is not enough to understand why the agent did something else. We augment Model-Based RL agents with a Reverse World Model, which predicts what the state of the world should have been for the agent to prefer a given counterfactual action. We show that explanations that show users what the world should have been like significantly increase their understanding of the agent policy. We hypothesize that our explanations can help users learn how to control the agents execution through by manipulating the environment.
STORY2GAME: Generating (Almost) Everything in an Interactive Fiction Game
May 06, 2025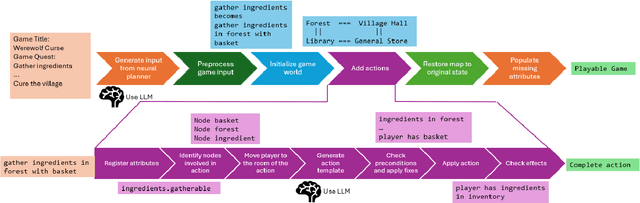
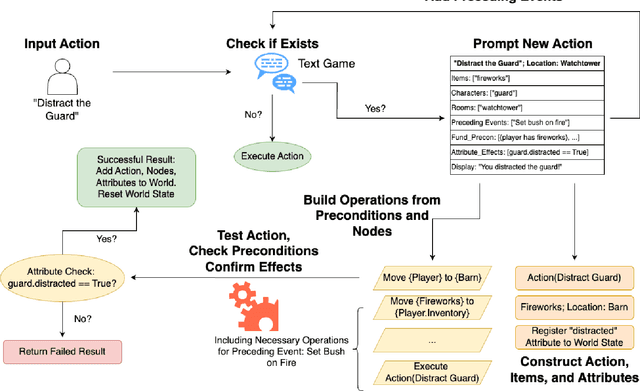
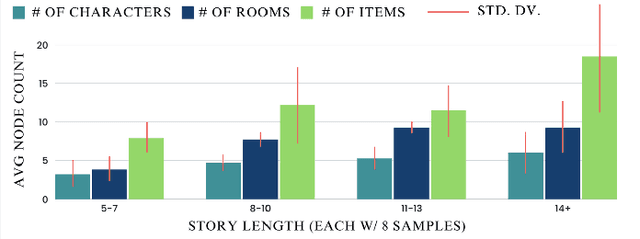
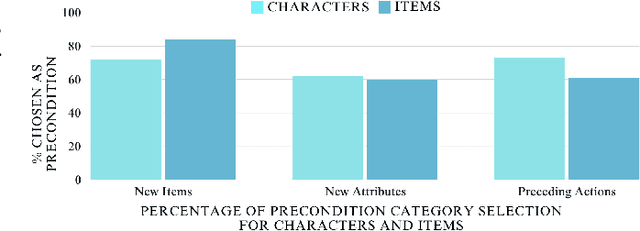
We introduce STORY2GAME, a novel approach to using Large Language Models to generate text-based interactive fiction games that starts by generating a story, populates the world, and builds the code for actions in a game engine that enables the story to play out interactively. Whereas a given set of hard-coded actions can artificially constrain story generation, the ability to generate actions means the story generation process can be more open-ended but still allow for experiences that are grounded in a game state. The key to successful action generation is to use LLM-generated preconditions and effects of actions in the stories as guides for what aspects of the game state must be tracked and changed by the game engine when a player performs an action. We also introduce a technique for dynamically generating new actions to accommodate the player's desire to perform actions that they think of that are not part of the story. Dynamic action generation may require on-the-fly updates to the game engine's state representation and revision of previously generated actions. We evaluate the success rate of action code generation with respect to whether a player can interactively play through the entire generated story.
Explainable AI Reloaded: Challenging the XAI Status Quo in the Era of Large Language Models
Aug 13, 2024When the initial vision of Explainable (XAI) was articulated, the most popular framing was to open the (proverbial) "black-box" of AI so that we could understand the inner workings. With the advent of Large Language Models (LLMs), the very ability to open the black-box is increasingly limited especially when it comes to non-AI expert end-users. In this paper, we challenge the assumption of "opening" the black-box in the LLM era and argue for a shift in our XAI expectations. Highlighting the epistemic blind spots of an algorithm-centered XAI view, we argue that a human-centered perspective can be a path forward. We operationalize the argument by synthesizing XAI research along three dimensions: explainability outside the black-box, explainability around the edges of the black box, and explainability that leverages infrastructural seams. We conclude with takeaways that reflexively inform XAI as a domain.
Is Exploration All You Need? Effective Exploration Characteristics for Transfer in Reinforcement Learning
Apr 02, 2024



In deep reinforcement learning (RL) research, there has been a concerted effort to design more efficient and productive exploration methods while solving sparse-reward problems. These exploration methods often share common principles (e.g., improving diversity) and implementation details (e.g., intrinsic reward). Prior work found that non-stationary Markov decision processes (MDPs) require exploration to efficiently adapt to changes in the environment with online transfer learning. However, the relationship between specific exploration characteristics and effective transfer learning in deep RL has not been characterized. In this work, we seek to understand the relationships between salient exploration characteristics and improved performance and efficiency in transfer learning. We test eleven popular exploration algorithms on a variety of transfer types -- or ``novelties'' -- to identify the characteristics that positively affect online transfer learning. Our analysis shows that some characteristics correlate with improved performance and efficiency across a wide range of transfer tasks, while others only improve transfer performance with respect to specific environment changes. From our analysis, make recommendations about which exploration algorithm characteristics are best suited to specific transfer situations.
A Simple Way to Incorporate Novelty Detection in World Models
Oct 12, 2023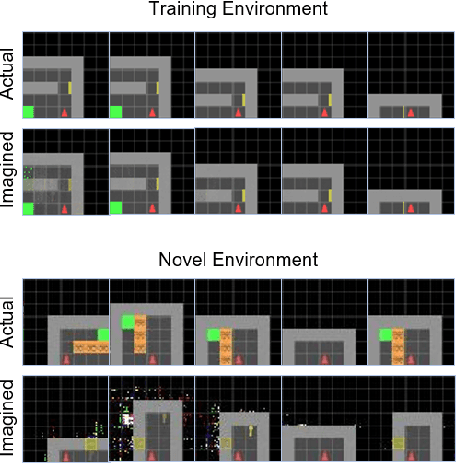

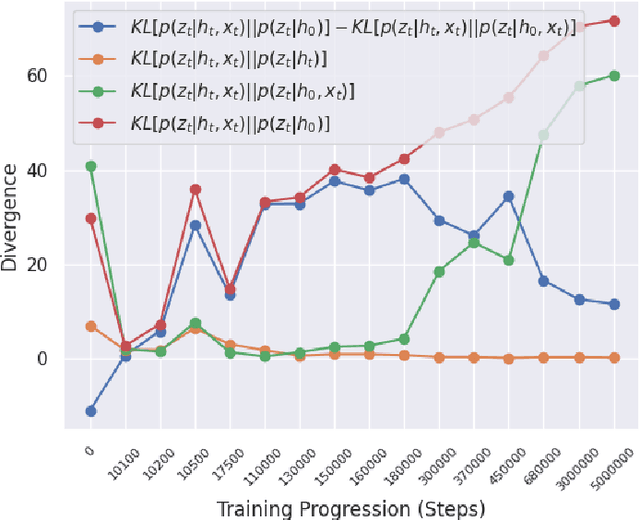
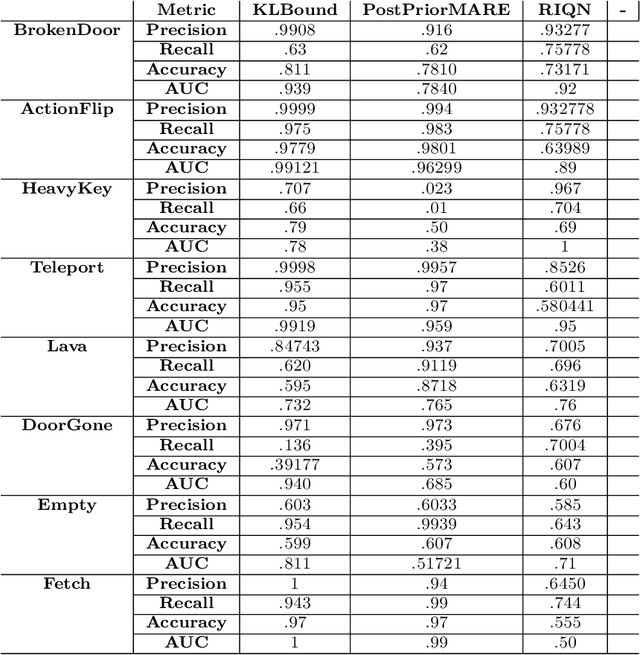
Reinforcement learning (RL) using world models has found significant recent successes. However, when a sudden change to world mechanics or properties occurs then agent performance and reliability can dramatically decline. We refer to the sudden change in visual properties or state transitions as {\em novelties}. Implementing novelty detection within generated world model frameworks is a crucial task for protecting the agent when deployed. In this paper, we propose straightforward bounding approaches to incorporate novelty detection into world model RL agents, by utilizing the misalignment of the world model's hallucinated states and the true observed states as an anomaly score. We first provide an ontology of novelty detection relevant to sequential decision making, then we provide effective approaches to detecting novelties in a distribution of transitions learned by an agent in a world model. Finally, we show the advantage of our work in a novel environment compared to traditional machine learning novelty detection methods as well as currently accepted RL focused novelty detection algorithms.
Charting the Sociotechnical Gap in Explainable AI: A Framework to Address the Gap in XAI
Feb 01, 2023Explainable AI (XAI) systems are sociotechnical in nature; thus, they are subject to the sociotechnical gap--divide between the technical affordances and the social needs. However, charting this gap is challenging. In the context of XAI, we argue that charting the gap improves our problem understanding, which can reflexively provide actionable insights to improve explainability. Utilizing two case studies in distinct domains, we empirically derive a framework that facilitates systematic charting of the sociotechnical gap by connecting AI guidelines in the context of XAI and elucidating how to use them to address the gap. We apply the framework to a third case in a new domain, showcasing its affordances. Finally, we discuss conceptual implications of the framework, share practical considerations in its operationalization, and offer guidance on transferring it to new contexts. By making conceptual and practical contributions to understanding the sociotechnical gap in XAI, the framework expands the XAI design space.
* Published at ACM CSCW 2023
Neuro-Symbolic World Models for Adapting to Open World Novelty
Jan 16, 2023



Open-world novelty--a sudden change in the mechanics or properties of an environment--is a common occurrence in the real world. Novelty adaptation is an agent's ability to improve its policy performance post-novelty. Most reinforcement learning (RL) methods assume that the world is a closed, fixed process. Consequentially, RL policies adapt inefficiently to novelties. To address this, we introduce WorldCloner, an end-to-end trainable neuro-symbolic world model for rapid novelty adaptation. WorldCloner learns an efficient symbolic representation of the pre-novelty environment transitions, and uses this transition model to detect novelty and efficiently adapt to novelty in a single-shot fashion. Additionally, WorldCloner augments the policy learning process using imagination-based adaptation, where the world model simulates transitions of the post-novelty environment to help the policy adapt. By blending ''imagined'' transitions with interactions in the post-novelty environment, performance can be recovered with fewer total environment interactions. Using environments designed for studying novelty in sequential decision-making problems, we show that the symbolic world model helps its neural policy adapt more efficiently than model-based and model-based neural-only reinforcement learning methods.
Neural Story Planning
Dec 16, 2022



Automated plot generation is the challenge of generating a sequence of events that will be perceived by readers as the plot of a coherent story. Traditional symbolic planners plan a story from a goal state and guarantee logical causal plot coherence but rely on a library of hand-crafted actions with their preconditions and effects. This closed world setting limits the length and diversity of what symbolic planners can generate. On the other hand, pre-trained neural language models can generate stories with great diversity, while being generally incapable of ending a story in a specified manner and can have trouble maintaining coherence. In this paper, we present an approach to story plot generation that unifies causal planning with neural language models. We propose to use commonsense knowledge extracted from large language models to recursively expand a story plot in a backward chaining fashion. Specifically, our system infers the preconditions for events in the story and then events that will cause those conditions to become true. We performed automatic evaluation to measure narrative coherence as indicated by the ability to answer questions about whether different events in the story are causally related to other events. Results indicate that our proposed method produces more coherent plotlines than several strong baselines.