 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Interpretability of Codebooks in Model-Based Reinforcement Learning is Limited
Jul 28, 2024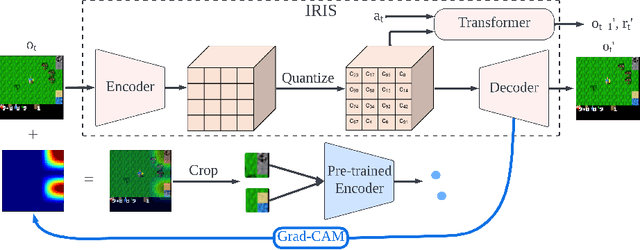
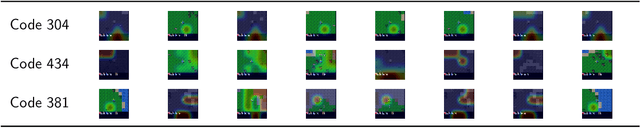
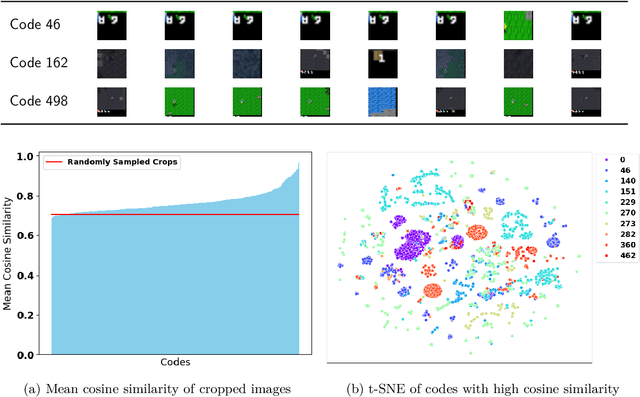
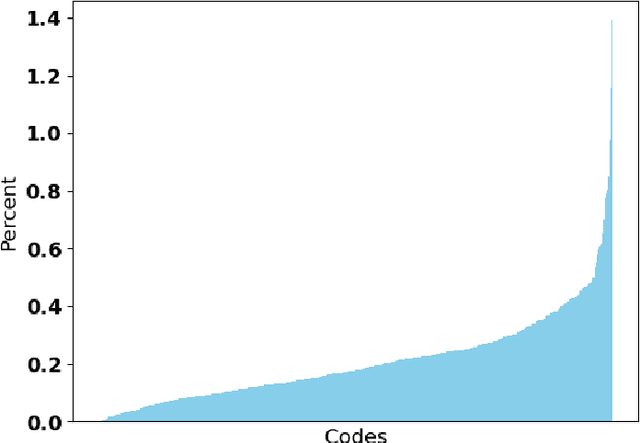
Interpretability of deep reinforcement learning systems could assist operators with understanding how they interact with their environment. Vector quantization methods -- also called codebook methods -- discretize a neural network's latent space that is often suggested to yield emergent interpretability. We investigate whether vector quantization in fact provides interpretability in model-based reinforcement learning. Our experiments, conducted in the reinforcement learning environment Crafter, show that the codes of vector quantization models are inconsistent, have no guarantee of uniqueness, and have a limited impact on concept disentanglement, all of which are necessary traits for interpretability. We share insights on why vector quantization may be fundamentally insufficient for model interpretability.
Using Analytics on Student Created Data to Content Validate Pedagogical Tools
Dec 11, 2023



Conceptual and simulation models can function as useful pedagogical tools, however it is important to categorize different outcomes when evaluating them in order to more meaningfully interpret results. VERA is a ecology-based conceptual modeling software that enables users to simulate interactions between biotics and abiotics in an ecosystem, allowing users to form and then verify hypothesis through observing a time series of the species populations. In this paper, we classify this time series into common patterns found in the domain of ecological modeling through two methods, hierarchical clustering and curve fitting, illustrating a general methodology for showing content validity when combining different pedagogical tools. When applied to a diverse sample of 263 models containing 971 time series collected from three different VERA user categories: a Georgia Tech (GATECH), North Georgia Technical College (NGTC), and ``Self Directed Learners'', results showed agreement between both classification methods on 89.38\% of the sample curves in the test set. This serves as a good indication that our methodology for determining content validity was successful.
A Simple Way to Incorporate Novelty Detection in World Models
Oct 12, 2023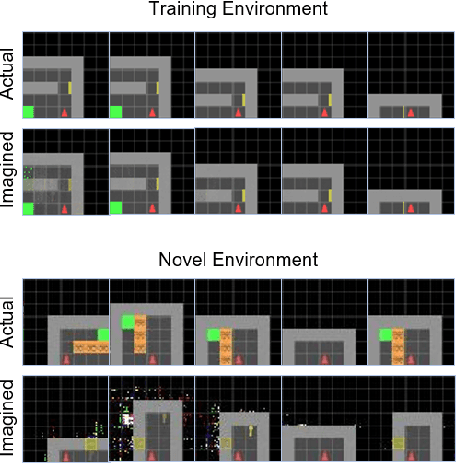

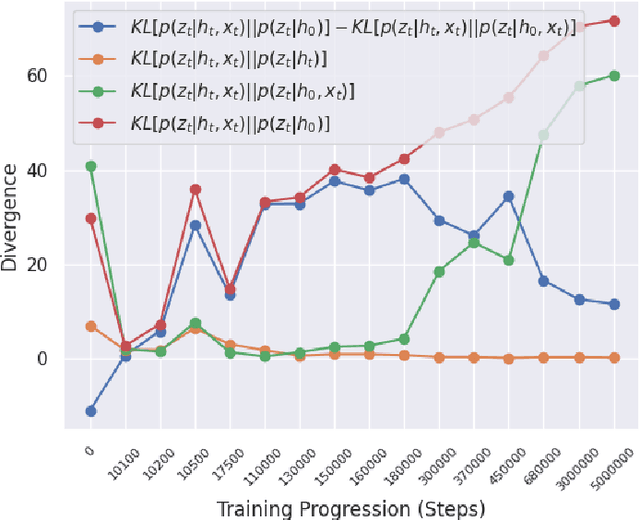
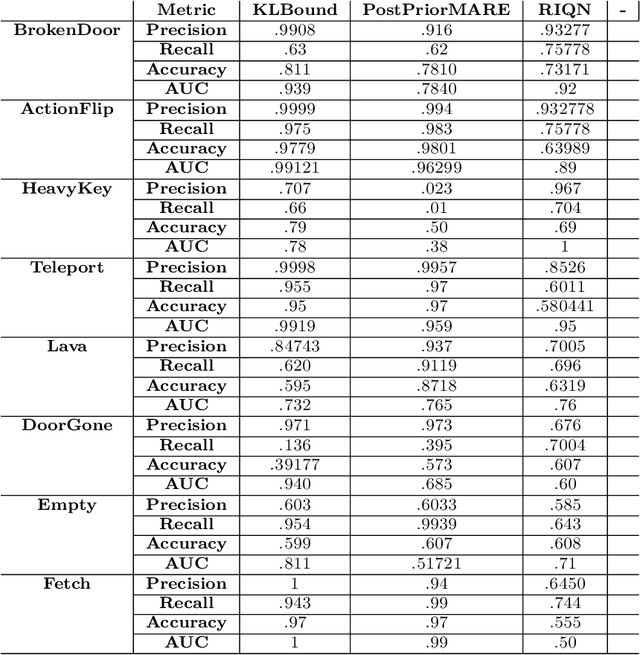
Reinforcement learning (RL) using world models has found significant recent successes. However, when a sudden change to world mechanics or properties occurs then agent performance and reliability can dramatically decline. We refer to the sudden change in visual properties or state transitions as {\em novelties}. Implementing novelty detection within generated world model frameworks is a crucial task for protecting the agent when deployed. In this paper, we propose straightforward bounding approaches to incorporate novelty detection into world model RL agents, by utilizing the misalignment of the world model's hallucinated states and the true observed states as an anomaly score. We first provide an ontology of novelty detection relevant to sequential decision making, then we provide effective approaches to detecting novelties in a distribution of transitions learned by an agent in a world model. Finally, we show the advantage of our work in a novel environment compared to traditional machine learning novelty detection methods as well as currently accepted RL focused novelty detection algorithms.
Ambient Adventures: Teaching ChatGPT on Developing Complex Stories
Aug 03, 2023

Imaginative play is an area of creativity that could allow robots to engage with the world around them in a much more personified way. Imaginary play can be seen as taking real objects and locations and using them as imaginary objects and locations in virtual scenarios. We adopted the story generation capability of large language models (LLMs) to obtain the stories used for imaginary play with human-written prompts. Those generated stories will be simplified and mapped into action sequences that can guide the agent in imaginary play. To evaluate whether the agent can successfully finish the imaginary play, we also designed a text adventure game to simulate a house as the playground for the agent to interact.