 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDINO in the Room: Leveraging 2D Foundation Models for 3D Segmentation
Mar 24, 2025



Vision foundation models (VFMs) trained on large-scale image datasets provide high-quality features that have significantly advanced 2D visual recognition. However, their potential in 3D vision remains largely untapped, despite the common availability of 2D images alongside 3D point cloud datasets. While significant research has been dedicated to 2D-3D fusion, recent state-of-the-art 3D methods predominantly focus on 3D data, leaving the integration of VFMs into 3D models underexplored. In this work, we challenge this trend by introducing DITR, a simple yet effective approach that extracts 2D foundation model features, projects them to 3D, and finally injects them into a 3D point cloud segmentation model. DITR achieves state-of-the-art results on both indoor and outdoor 3D semantic segmentation benchmarks. To enable the use of VFMs even when images are unavailable during inference, we further propose to distill 2D foundation models into a 3D backbone as a pretraining task. By initializing the 3D backbone with knowledge distilled from 2D VFMs, we create a strong basis for downstream 3D segmentation tasks, ultimately boosting performance across various datasets.
Fine-Tuning Image-Conditional Diffusion Models is Easier than You Think
Sep 17, 2024



Recent work showed that large diffusion models can be reused as highly precise monocular depth estimators by casting depth estimation as an image-conditional image generation task. While the proposed model achieved state-of-the-art results, high computational demands due to multi-step inference limited its use in many scenarios. In this paper, we show that the perceived inefficiency was caused by a flaw in the inference pipeline that has so far gone unnoticed. The fixed model performs comparably to the best previously reported configuration while being more than 200$\times$ faster. To optimize for downstream task performance, we perform end-to-end fine-tuning on top of the single-step model with task-specific losses and get a deterministic model that outperforms all other diffusion-based depth and normal estimation models on common zero-shot benchmarks. We surprisingly find that this fine-tuning protocol also works directly on Stable Diffusion and achieves comparable performance to current state-of-the-art diffusion-based depth and normal estimation models, calling into question some of the conclusions drawn from prior works.
Benchmarks and Challenges in Pose Estimation for Egocentric Hand Interactions with Objects
Mar 25, 2024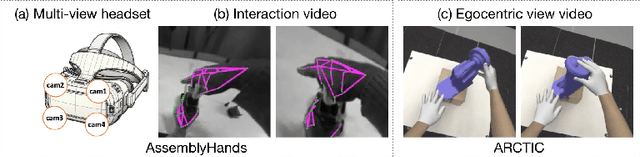
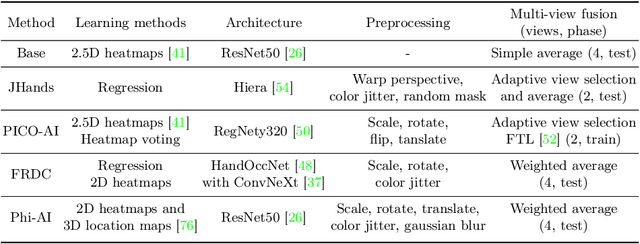
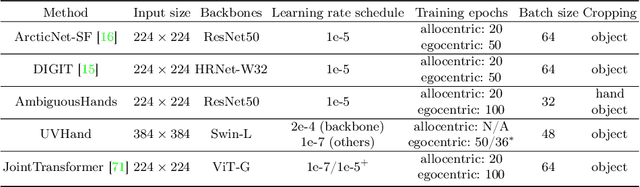
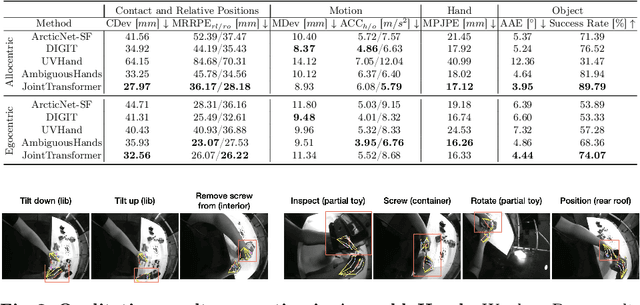
We interact with the world with our hands and see it through our own (egocentric) perspective. A holistic 3D understanding of such interactions from egocentric views is important for tasks in robotics, AR/VR, action recognition and motion generation. Accurately reconstructing such interactions in 3D is challenging due to heavy occlusion, viewpoint bias, camera distortion, and motion blur from the head movement. To this end, we designed the HANDS23 challenge based on the AssemblyHands and ARCTIC datasets with carefully designed training and testing splits. Based on the results of the top submitted methods and more recent baselines on the leaderboards, we perform a thorough analysis on 3D hand(-object) reconstruction tasks. Our analysis demonstrates the effectiveness of addressing distortion specific to egocentric cameras, adopting high-capacity transformers to learn complex hand-object interactions, and fusing predictions from different views. Our study further reveals challenging scenarios intractable with state-of-the-art methods, such as fast hand motion, object reconstruction from narrow egocentric views, and close contact between two hands and objects. Our efforts will enrich the community's knowledge foundation and facilitate future hand studies on egocentric hand-object interactions.
Point2Vec for Self-Supervised Representation Learning on Point Clouds
Mar 29, 2023Recently, the self-supervised learning framework data2vec has shown inspiring performance for various modalities using a masked student-teacher approach. However, it remains open whether such a framework generalizes to the unique challenges of 3D point clouds. To answer this question, we extend data2vec to the point cloud domain and report encouraging results on several downstream tasks. In an in-depth analysis, we discover that the leakage of positional information reveals the overall object shape to the student even under heavy masking and thus hampers data2vec to learn strong representations for point clouds. We address this 3D-specific shortcoming by proposing point2vec, which unleashes the full potential of data2vec-like pre-training on point clouds. Our experiments show that point2vec outperforms other self-supervised methods on shape classification and few-shot learning on ModelNet40 and ScanObjectNN, while achieving competitive results on part segmentation on ShapeNetParts. These results suggest that the learned representations are strong and transferable, highlighting point2vec as a promising direction for self-supervised learning of point cloud representations.