 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelecting Spots by Explicitly Predicting Intention from Motion History Improves Performance in Autonomous Parking
Mar 05, 2026In many applications of social navigation, existing works have shown that predicting and reasoning about human intentions can help robotic agents make safer and more socially acceptable decisions. In this work, we study this problem for autonomous valet parking (AVP), where an autonomous vehicle ego agent must drop off its passengers, explore the parking lot, find a parking spot, negotiate for the spot with other vehicles, and park in the spot without human supervision. Specifically, we propose an AVP pipeline that selects parking spots by explicitly predicting where other agents are going to park from their motion history using learned models and probabilistic belief maps. To test this pipeline, we build a simulation environment with reactive agents and realistic modeling assumptions on the ego agent, such as occlusion-aware observations, and imperfect trajectory prediction. Simulation experiments show that our proposed method outperforms existing works that infer intentions from future predicted motion or embed them implicitly in end-to-end models, yielding better results in prediction accuracy, social acceptance, and task completion. Our key insight is that, in parking, where driving regulations are more lax, explicit intention prediction is crucial for reasoning about diverse and ambiguous long-term goals, which cannot be reliably inferred from short-term motion prediction alone, but can be effectively learned from motion history.
Adaptive Time Step Flow Matching for Autonomous Driving Motion Planning
Feb 14, 2026Autonomous driving requires reasoning about interactions with surrounding traffic. A prevailing approach is large-scale imitation learning on expert driving datasets, aimed at generalizing across diverse real-world scenarios. For online trajectory generation, such methods must operate at real-time rates. Diffusion models require hundreds of denoising steps at inference, resulting in high latency. Consistency models mitigate this issue but rely on carefully tuned noise schedules to capture the multimodal action distributions common in autonomous driving. Adapting the schedule, typically requires expensive retraining. To address these limitations, we propose a framework based on conditional flow matching that jointly predicts future motions of surrounding agents and plans the ego trajectory in real time. We train a lightweight variance estimator that selects the number of inference steps online, removing the need for retraining to balance runtime and imitation learning performance. To further enhance ride quality, we introduce a trajectory post-processing step cast as a convex quadratic program, with negligible computational overhead. Trained on the Waymo Open Motion Dataset, the framework performs maneuvers such as lane changes, cruise control, and navigating unprotected left turns without requiring scenario-specific tuning. Our method maintains a 20 Hz update rate on an NVIDIA RTX 3070 GPU, making it suitable for online deployment. Compared to transformer, diffusion, and consistency model baselines, we achieve improved trajectory smoothness and better adherence to dynamic constraints. Experiment videos and code implementations can be found at https://flow-matching-self-driving.github.io/.
ONRAP: Occupancy-driven Noise-Resilient Autonomous Path Planning
Feb 14, 2026Dynamic path planning must remain reliable in the presence of sensing noise, uncertain localization, and incomplete semantic perception. We propose a practical, implementation-friendly planner that operates on occupancy grids and optionally incorporates occupancy-flow predictions to generate ego-centric, kinematically feasible paths that safely navigate through static and dynamic obstacles. The core is a nonlinear program in the spatial domain built on a modified bicycle model with explicit feasibility and collision-avoidance penalties. The formulation naturally handles unknown obstacle classes and heterogeneous agent motion by operating purely in occupancy space. The pipeline runs in real-time (faster than 10 Hz on average), requires minimal tuning, and interfaces cleanly with standard control stacks. We validate our approach in simulation with severe localization and perception noises, and on an F1TENTH platform, demonstrating smooth and safe maneuvering through narrow passages and rough routes. The approach provides a robust foundation for noise-resilient, prediction-aware planning, eliminating the need for handcrafted heuristics. The project website can be accessed at https://honda-research-institute.github.io/onrap/
Occupancy-aware Trajectory Planning for Autonomous Valet Parking in Uncertain Dynamic Environments
Sep 11, 2025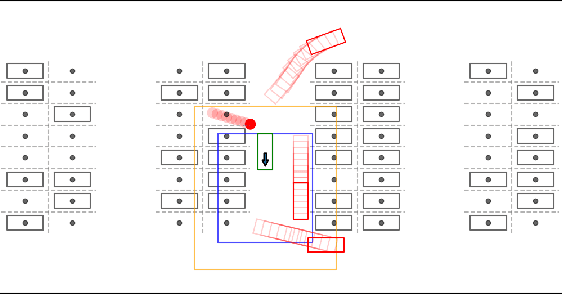
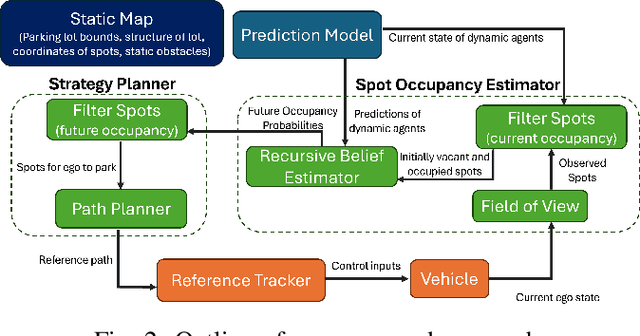
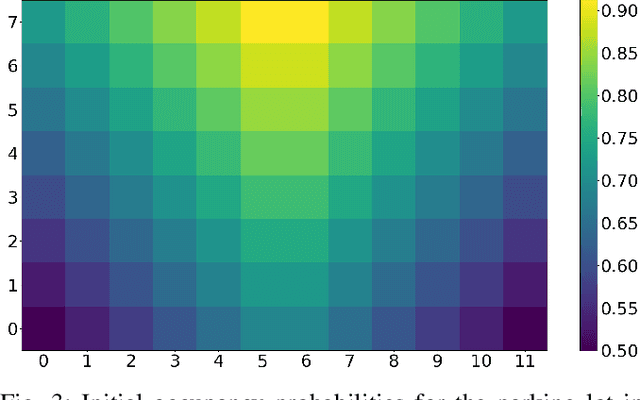
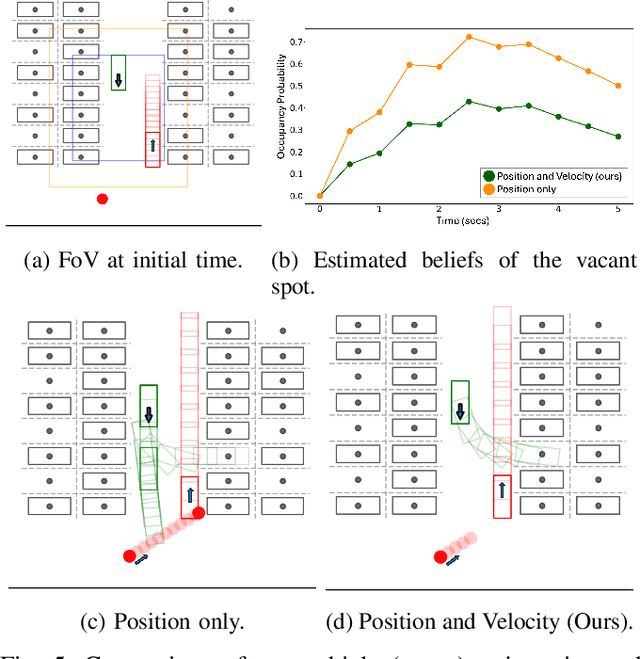
Accurately reasoning about future parking spot availability and integrated planning is critical for enabling safe and efficient autonomous valet parking in dynamic, uncertain environments. Unlike existing methods that rely solely on instantaneous observations or static assumptions, we present an approach that predicts future parking spot occupancy by explicitly distinguishing between initially vacant and occupied spots, and by leveraging the predicted motion of dynamic agents. We introduce a probabilistic spot occupancy estimator that incorporates partial and noisy observations within a limited Field-of-View (FoV) model and accounts for the evolving uncertainty of unobserved regions. Coupled with this, we design a strategy planner that adaptively balances goal-directed parking maneuvers with exploratory navigation based on information gain, and intelligently incorporates wait-and-go behaviors at promising spots. Through randomized simulations emulating large parking lots, we demonstrate that our framework significantly improves parking efficiency, safety margins, and trajectory smoothness compared to existing approaches.
IANN-MPPI: Interaction-Aware Neural Network-Enhanced Model Predictive Path Integral Approach for Autonomous Driving
Jul 16, 2025Motion planning for autonomous vehicles (AVs) in dense traffic is challenging, often leading to overly conservative behavior and unmet planning objectives. This challenge stems from the AVs' limited ability to anticipate and respond to the interactive behavior of surrounding agents. Traditional decoupled prediction and planning pipelines rely on non-interactive predictions that overlook the fact that agents often adapt their behavior in response to the AV's actions. To address this, we propose Interaction-Aware Neural Network-Enhanced Model Predictive Path Integral (IANN-MPPI) control, which enables interactive trajectory planning by predicting how surrounding agents may react to each control sequence sampled by MPPI. To improve performance in structured lane environments, we introduce a spline-based prior for the MPPI sampling distribution, enabling efficient lane-changing behavior. We evaluate IANN-MPPI in a dense traffic merging scenario, demonstrating its ability to perform efficient merging maneuvers. Our project website is available at https://sites.google.com/berkeley.edu/iann-mppi
Graph-based Path Planning with Dynamic Obstacle Avoidance for Autonomous Parking
Apr 17, 2025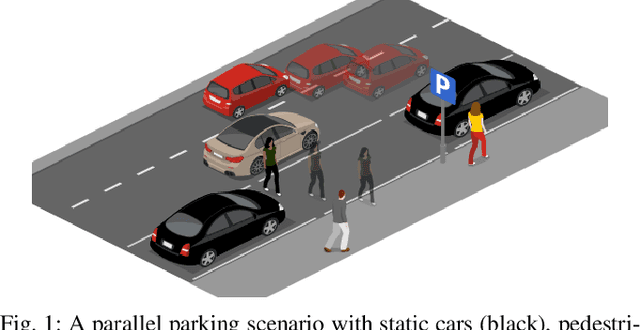
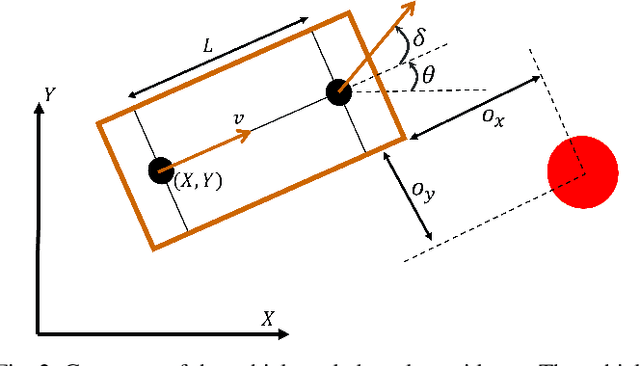
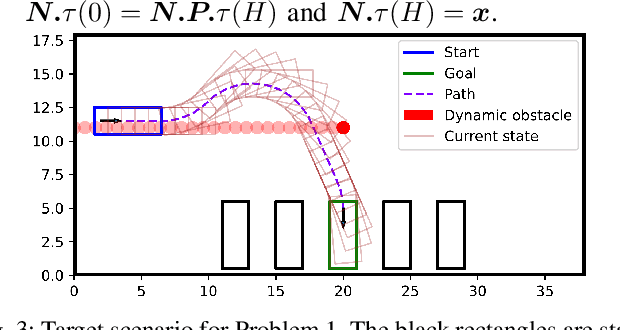
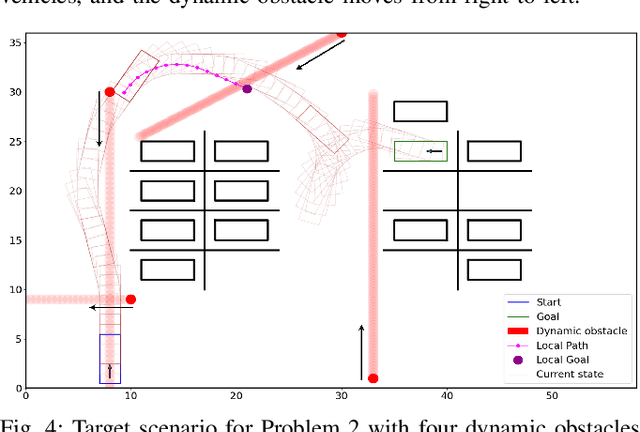
Safe and efficient path planning in parking scenarios presents a significant challenge due to the presence of cluttered environments filled with static and dynamic obstacles. To address this, we propose a novel and computationally efficient planning strategy that seamlessly integrates the predictions of dynamic obstacles into the planning process, ensuring the generation of collision-free paths. Our approach builds upon the conventional Hybrid A star algorithm by introducing a time-indexed variant that explicitly accounts for the predictions of dynamic obstacles during node exploration in the graph, thus enabling dynamic obstacle avoidance. We integrate the time-indexed Hybrid A star algorithm within an online planning framework to compute local paths at each planning step, guided by an adaptively chosen intermediate goal. The proposed method is validated in diverse parking scenarios, including perpendicular, angled, and parallel parking. Through simulations, we showcase our approach's potential in greatly improving the efficiency and safety when compared to the state of the art spline-based planning method for parking situations.
Active Learning with Dual Model Predictive Path-Integral Control for Interaction-Aware Autonomous Highway On-ramp Merging
Oct 11, 2023



Merging into dense highway traffic for an autonomous vehicle is a complex decision-making task, wherein the vehicle must identify a potential gap and coordinate with surrounding human drivers, each of whom may exhibit diverse driving behaviors. Many existing methods consider other drivers to be dynamic obstacles and, as a result, are incapable of capturing the full intent of the human drivers via this passive planning. In this paper, we propose a novel dual control framework based on Model Predictive Path-Integral control to generate interactive trajectories. This framework incorporates a Bayesian inference approach to actively learn the agents' parameters, i.e., other drivers' model parameters. The proposed framework employs a sampling-based approach that is suitable for real-time implementation through the utilization of GPUs. We illustrate the effectiveness of our proposed methodology through comprehensive numerical simulations conducted in both high and low-fidelity simulation scenarios focusing on autonomous on-ramp merging.
Multi-Robot Cooperative Navigation in Crowds: A Game-Theoretic Learning-Based Model Predictive Control Approach
Oct 10, 2023



In this paper, we develop a control framework for the coordination of multiple robots as they navigate through crowded environments. Our framework comprises of a local model predictive control (MPC) for each robot and a social long short-term memory model that forecasts pedestrians' trajectories. We formulate the local MPC formulation for each individual robot that includes both individual and shared objectives, in which the latter encourages the emergence of coordination among robots. Next, we consider the multi-robot navigation and human-robot interaction, respectively, as a potential game and a two-player game, then employ an iterative best response approach to solve the resulting optimization problems in a centralized and distributed fashion. Finally, we demonstrate the effectiveness of coordination among robots in simulated crowd navigation.
Social Navigation in Crowded Environments with Model Predictive Control and Deep Learning-Based Human Trajectory Prediction
Sep 28, 2023



Crowd navigation has received increasing attention from researchers over the last few decades, resulting in the emergence of numerous approaches aimed at addressing this problem to date. Our proposed approach couples agent motion prediction and planning to avoid the freezing robot problem while simultaneously capturing multi-agent social interactions by utilizing a state-of-the-art trajectory prediction model i.e., social long short-term memory model (Social-LSTM). Leveraging the output of Social-LSTM for the prediction of future trajectories of pedestrians at each time-step given the robot's possible actions, our framework computes the optimal control action using Model Predictive Control (MPC) for the robot to navigate among pedestrians. We demonstrate the effectiveness of our proposed approach in multiple scenarios of simulated crowd navigation and compare it against several state-of-the-art reinforcement learning-based methods.
MR-IDM -- Merge Reactive Intelligent Driver Model: Towards Enhancing Laterally Aware Car-following Models
May 19, 2023This paper discusses the limitations of existing microscopic traffic models in accounting for the potential impacts of on-ramp vehicles on the car-following behavior of main-lane vehicles on highways. We first surveyed U.S. on-ramps to choose a representative set of on-ramps and then collected real-world observational data from the merging vehicle's perspective in various traffic conditions ranging from free-flowing to rush-hour traffic jams. Next, as our core contribution, we introduce a novel car-following model, called MR-IDM, for highway driving that reacts to merging vehicles in a realistic way. This proposed driving model can either be used in traffic simulators to generate realistic highway driving behavior or integrated into a prediction module for autonomous vehicles attempting to merge onto the highway. We quantitatively evaluated the effectiveness of our model and compared it against several other methods. We show that MR-IDM has the least error in mimicking the real-world data, while having features such as smoothness, stability, and lateral awareness.