 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrated Scenario-based Analysis: A data-driven approach to support automated driving systems development and safety evaluation
Jul 29, 2024
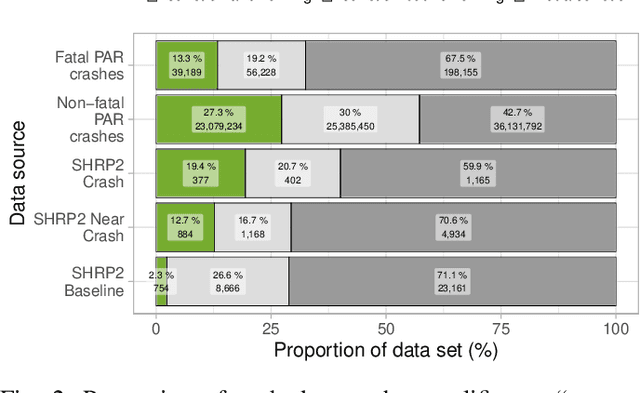
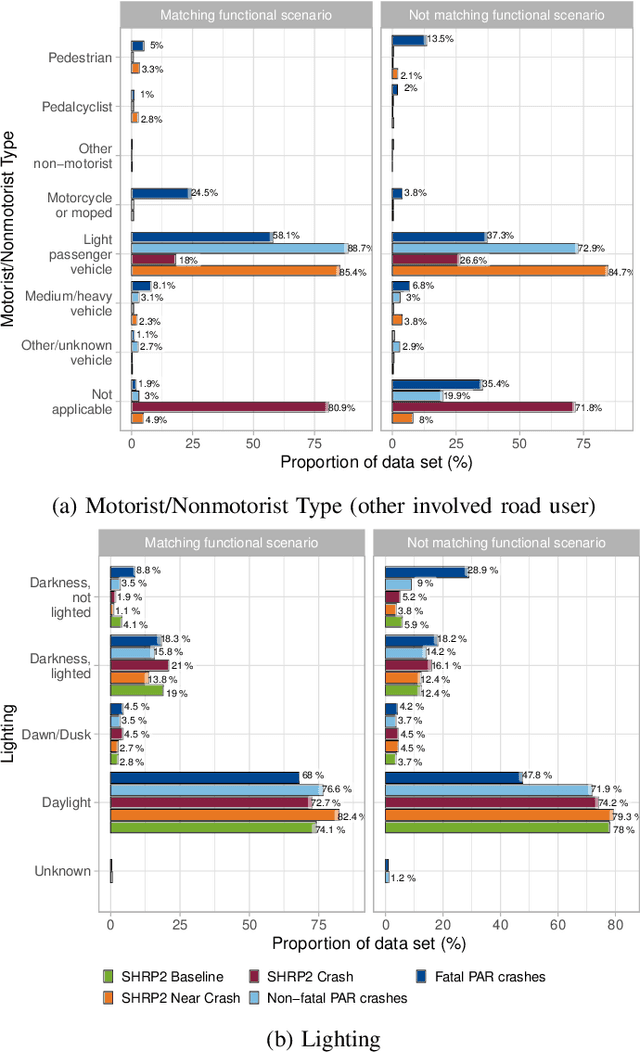
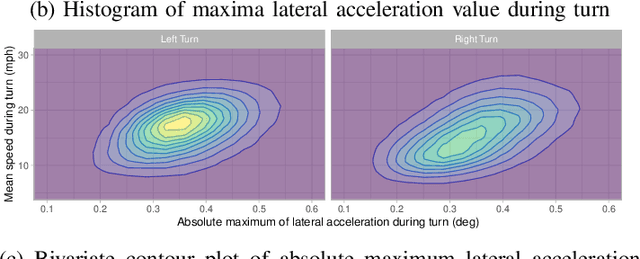
Several scenario-based frameworks exist to aid in vehicle system development and safety assurance. However, there is a need for approaches that combine different types of datasets that offer varying levels of case severity, data richness, and representativeness. This study presents an integrated scenario-based analysis approach that encompasses scenario definition, fusion, parametrization, and test case generation. For this process, ten years of fatal and non-fatal national crash data from the United States are combined with over 34 million miles of naturalistic driving data. An illustrative example scenario, "turns at intersection", is chosen to demonstrate this approach. First, scenario definitions are established from both record-based and continuous time series data. Second, a frequency analysis is performed to understand how often events from the same scenario occur at different severities across datasets. Third, an analysis is performed to show the key factors relevant to the scenario and the distribution of various parameters. Finally, a method to combine both types of data into representative test case scenarios is presented. These techniques improve scenario representativeness in two major ways: first, they populate an entire spectrum of cases ranging from routine events to fatal crashes; and second, they provide context-rich, multi-year data by combining large-scale national and naturalistic datasets.
Modeling the Lane-Change Reactions to Merging Vehicles for Highway On-Ramp Simulations
Apr 15, 2024



Enhancing simulation environments to replicate real-world driver behavior is essential for developing Autonomous Vehicle technology. While some previous works have studied the yielding reaction of lag vehicles in response to a merging car at highway on-ramps, the possible lane-change reaction of the lag car has not been widely studied. In this work we aim to improve the simulation of the highway merge scenario by including the lane-change reaction in addition to yielding behavior of main-lane lag vehicles, and we evaluate two different models for their ability to capture this reactive lane-change behavior. To tune the payoff functions of these models, a novel naturalistic dataset was collected on U.S. highways that provided several hours of merge-specific data to learn the lane change behavior of U.S. drivers. To make sure that we are collecting a representative set of different U.S. highway geometries in our data, we surveyed 50,000 U.S. highway on-ramps and then selected eight representative sites. The data were collected using roadside-mounted lidar sensors to capture various merge driver interactions. The models were demonstrated to be configurable for both keep-straight and lane-change behavior. The models were finally integrated into a high-fidelity simulation environment and confirmed to have adequate computation time efficiency for use in large-scale simulations to support autonomous vehicle development.
MR-IDM -- Merge Reactive Intelligent Driver Model: Towards Enhancing Laterally Aware Car-following Models
May 19, 2023This paper discusses the limitations of existing microscopic traffic models in accounting for the potential impacts of on-ramp vehicles on the car-following behavior of main-lane vehicles on highways. We first surveyed U.S. on-ramps to choose a representative set of on-ramps and then collected real-world observational data from the merging vehicle's perspective in various traffic conditions ranging from free-flowing to rush-hour traffic jams. Next, as our core contribution, we introduce a novel car-following model, called MR-IDM, for highway driving that reacts to merging vehicles in a realistic way. This proposed driving model can either be used in traffic simulators to generate realistic highway driving behavior or integrated into a prediction module for autonomous vehicles attempting to merge onto the highway. We quantitatively evaluated the effectiveness of our model and compared it against several other methods. We show that MR-IDM has the least error in mimicking the real-world data, while having features such as smoothness, stability, and lateral awareness.