 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChromFound: Towards A Universal Foundation Model for Single-Cell Chromatin Accessibility Data
May 19, 2025The advent of single-cell Assay for Transposase-Accessible Chromatin using sequencing (scATAC-seq) offers an innovative perspective for deciphering regulatory mechanisms by assembling a vast repository of single-cell chromatin accessibility data. While foundation models have achieved significant success in single-cell transcriptomics, there is currently no foundation model for scATAC-seq that supports zero-shot high-quality cell identification and comprehensive multi-omics analysis simultaneously. Key challenges lie in the high dimensionality and sparsity of scATAC-seq data, as well as the lack of a standardized schema for representing open chromatin regions (OCRs). Here, we present \textbf{ChromFound}, a foundation model tailored for scATAC-seq. ChromFound utilizes a hybrid architecture and genome-aware tokenization to effectively capture genome-wide long contexts and regulatory signals from dynamic chromatin landscapes. Pretrained on 1.97 million cells from 30 tissues and 6 disease conditions, ChromFound demonstrates broad applicability across 6 diverse tasks. Notably, it achieves robust zero-shot performance in generating universal cell representations and exhibits excellent transferability in cell type annotation and cross-omics prediction. By uncovering enhancer-gene links undetected by existing computational methods, ChromFound offers a promising framework for understanding disease risk variants in the noncoding genome.
Dataset Distillers Are Good Label Denoisers In the Wild
Nov 18, 2024



Learning from noisy data has become essential for adapting deep learning models to real-world applications. Traditional methods often involve first evaluating the noise and then applying strategies such as discarding noisy samples, re-weighting, or re-labeling. However, these methods can fall into a vicious cycle when the initial noise evaluation is inaccurate, leading to suboptimal performance. To address this, we propose a novel approach that leverages dataset distillation for noise removal. This method avoids the feedback loop common in existing techniques and enhances training efficiency, while also providing strong privacy protection through offline processing. We rigorously evaluate three representative dataset distillation methods (DATM, DANCE, and RCIG) under various noise conditions, including symmetric noise, asymmetric noise, and real-world natural noise. Our empirical findings reveal that dataset distillation effectively serves as a denoising tool in random noise scenarios but may struggle with structured asymmetric noise patterns, which can be absorbed into the distilled samples. Additionally, clean but challenging samples, such as those from tail classes in imbalanced datasets, may undergo lossy compression during distillation. Despite these challenges, our results highlight that dataset distillation holds significant promise for robust model training, especially in high-privacy environments where noise is prevalent.
LoopGaussian: Creating 3D Cinemagraph with Multi-view Images via Eulerian Motion Field
Apr 13, 2024



Cinemagraph is a unique form of visual media that combines elements of still photography and subtle motion to create a captivating experience. However, the majority of videos generated by recent works lack depth information and are confined to the constraints of 2D image space. In this paper, inspired by significant progress in the field of novel view synthesis (NVS) achieved by 3D Gaussian Splatting (3D-GS), we propose LoopGaussian to elevate cinemagraph from 2D image space to 3D space using 3D Gaussian modeling. To achieve this, we first employ the 3D-GS method to reconstruct 3D Gaussian point clouds from multi-view images of static scenes,incorporating shape regularization terms to prevent blurring or artifacts caused by object deformation. We then adopt an autoencoder tailored for 3D Gaussian to project it into feature space. To maintain the local continuity of the scene, we devise SuperGaussian for clustering based on the acquired features. By calculating the similarity between clusters and employing a two-stage estimation method, we derive an Eulerian motion field to describe velocities across the entire scene. The 3D Gaussian points then move within the estimated Eulerian motion field. Through bidirectional animation techniques, we ultimately generate a 3D Cinemagraph that exhibits natural and seamlessly loopable dynamics. Experiment results validate the effectiveness of our approach, demonstrating high-quality and visually appealing scene generation.
Binary Stereo Matching
Feb 10, 2014
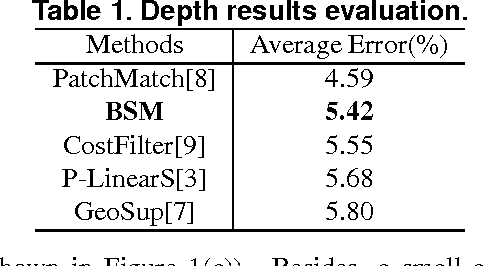
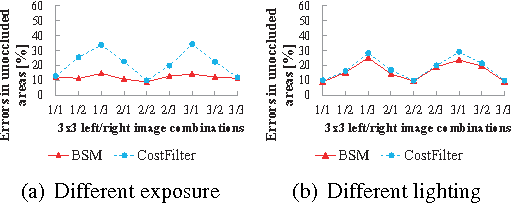

In this paper, we propose a novel binary-based cost computation and aggregation approach for stereo matching problem. The cost volume is constructed through bitwise operations on a series of binary strings. Then this approach is combined with traditional winner-take-all strategy, resulting in a new local stereo matching algorithm called binary stereo matching (BSM). Since core algorithm of BSM is based on binary and integer computations, it has a higher computational efficiency than previous methods. Experimental results on Middlebury benchmark show that BSM has comparable performance with state-of-the-art local stereo methods in terms of both quality and speed. Furthermore, experiments on images with radiometric differences demonstrate that BSM is more robust than previous methods under these changes, which is common under real illumination.