 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-robot autonomous 3D reconstruction using Gaussian splatting with Semantic guidance
Dec 03, 2024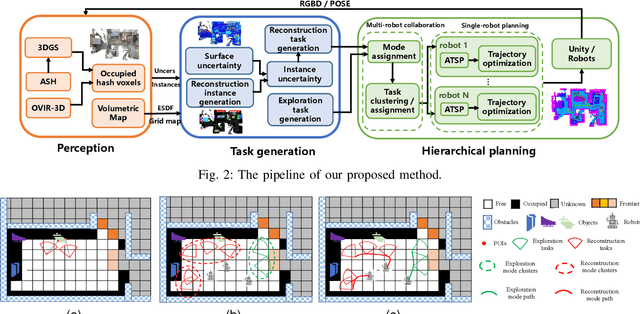
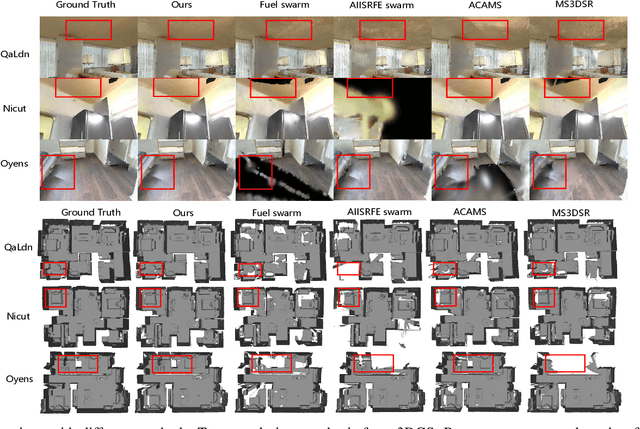

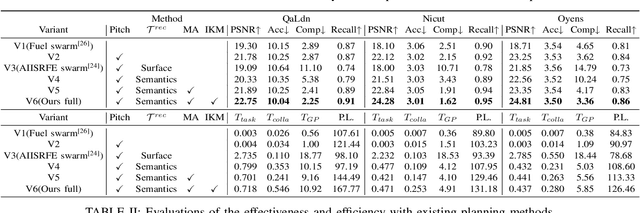
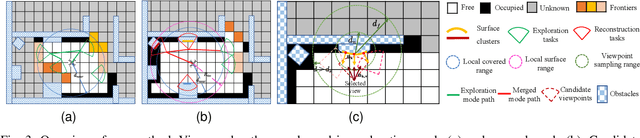
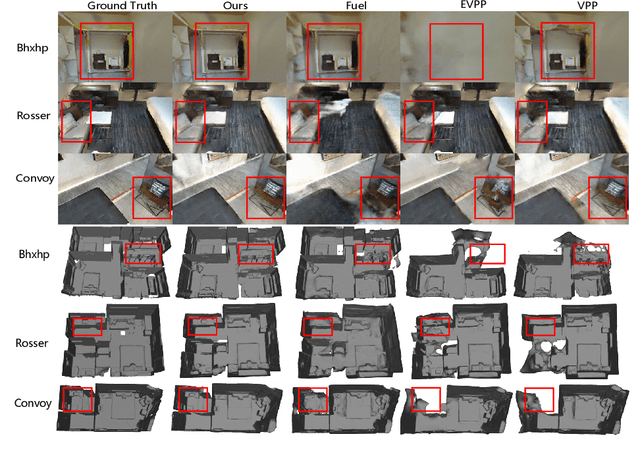
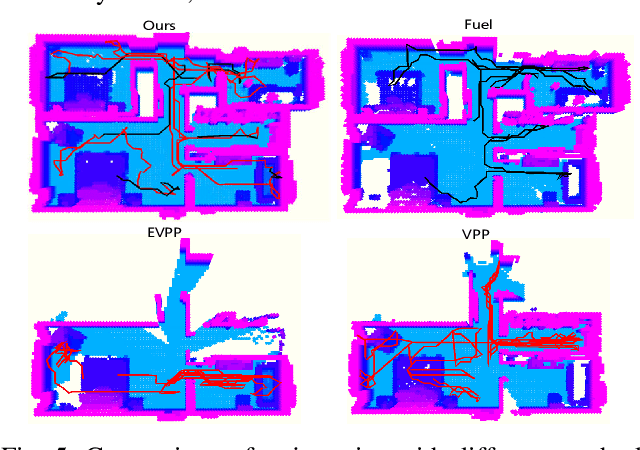
Implicit neural representations and 3D Gaussian splatting (3DGS) have shown great potential for scene reconstruction. Recent studies have expanded their applications in autonomous reconstruction through task assignment methods. However, these methods are mainly limited to single robot, and rapid reconstruction of large-scale scenes remains challenging. Additionally, task-driven planning based on surface uncertainty is prone to being trapped in local optima. To this end, we propose the first 3DGS-based centralized multi-robot autonomous 3D reconstruction framework. To further reduce time cost of task generation and improve reconstruction quality, we integrate online open-vocabulary semantic segmentation with surface uncertainty of 3DGS, focusing view sampling on regions with high instance uncertainty. Finally, we develop a multi-robot collaboration strategy with mode and task assignments improving reconstruction quality while ensuring planning efficiency. Our method demonstrates the highest reconstruction quality among all planning methods and superior planning efficiency compared to existing multi-robot methods. We deploy our method on multiple robots, and results show that it can effectively plan view paths and reconstruct scenes with high quality.
Autonomous Implicit Indoor Scene Reconstruction with Frontier Exploration
Apr 16, 2024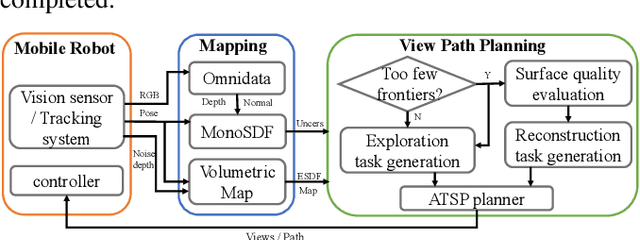
Implicit neural representations have demonstrated significant promise for 3D scene reconstruction. Recent works have extended their applications to autonomous implicit reconstruction through the Next Best View (NBV) based method. However, the NBV method cannot guarantee complete scene coverage and often necessitates extensive viewpoint sampling, particularly in complex scenes. In the paper, we propose to 1) incorporate frontier-based exploration tasks for global coverage with implicit surface uncertainty-based reconstruction tasks to achieve high-quality reconstruction. and 2) introduce a method to achieve implicit surface uncertainty using color uncertainty, which reduces the time needed for view selection. Further with these two tasks, we propose an adaptive strategy for switching modes in view path planning, to reduce time and maintain superior reconstruction quality. Our method exhibits the highest reconstruction quality among all planning methods and superior planning efficiency in methods involving reconstruction tasks. We deploy our method on a UAV and the results show that our method can plan multi-task views and reconstruct a scene with high quality.
* 7 pages
Efficient View Path Planning for Autonomous Implicit Reconstruction
Sep 27, 2022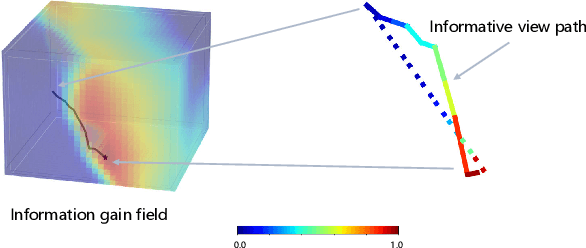
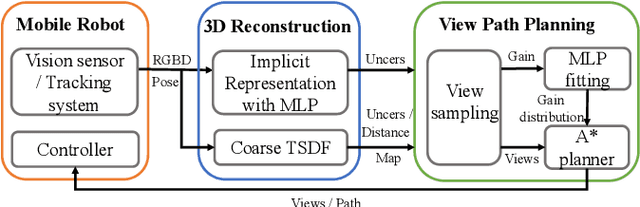
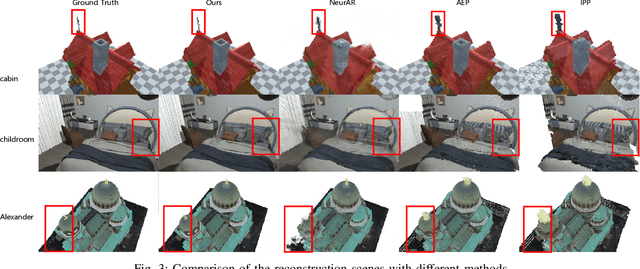
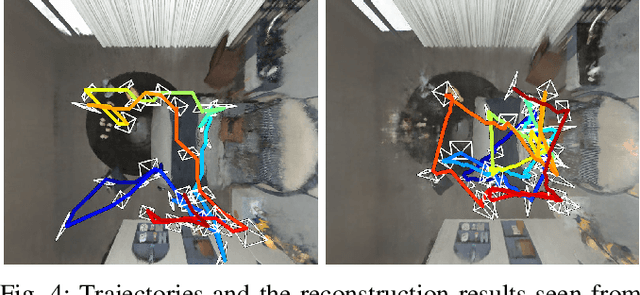
Implicit neural representations have shown promising potential for the 3D scene reconstruction. Recent work applies it to autonomous 3D reconstruction by learning information gain for view path planning. Effective as it is, the computation of the information gain is expensive, and compared with that using volumetric representations, collision checking using the implicit representation for a 3D point is much slower. In the paper, we propose to 1) leverage a neural network as an implicit function approximator for the information gain field and 2) combine the implicit fine-grained representation with coarse volumetric representations to improve efficiency. Further with the improved efficiency, we propose a novel informative path planning based on a graph-based planner. Our method demonstrates significant improvements in the reconstruction quality and planning efficiency compared with autonomous reconstructions with implicit and explicit representations. We deploy the method on a real UAV and the results show that our method can plan informative views and reconstruct a scene with high quality.
Domain Shift-oriented Machine Anomalous Sound Detection Model Based on Self-Supervised Learning
Aug 31, 2022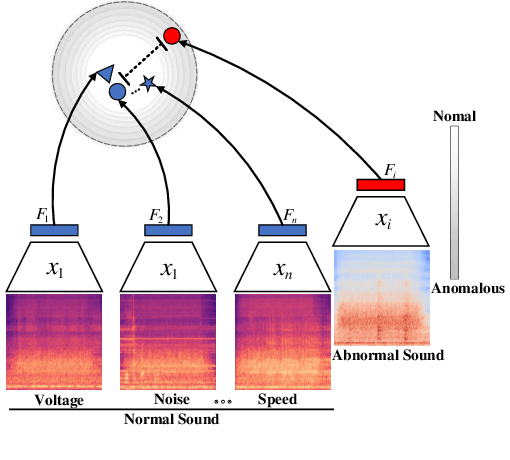
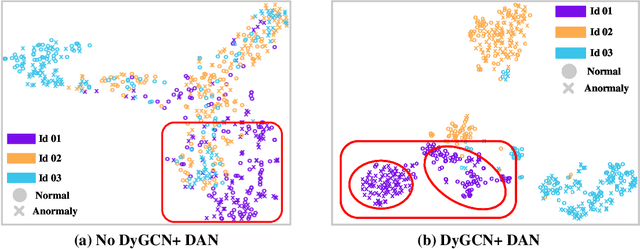
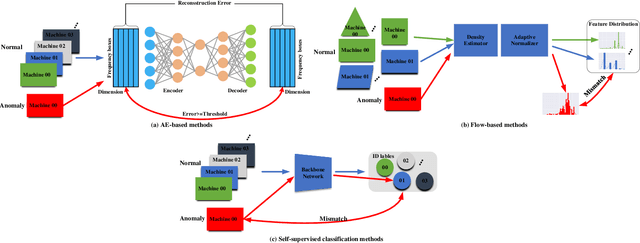
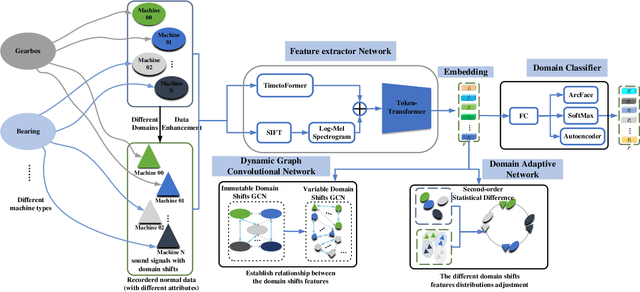
Thanks to the development of deep learning, research on machine anomalous sound detection based on self-supervised learning has made remarkable achievements. However, there are differences in the acoustic characteristics of the test set and the training set under different operating conditions of the same machine (domain shifts). It is challenging for the existing detection methods to learn the domain shifts features stably with low computation overhead. To address these problems, we propose a domain shift-oriented machine anomalous sound detection model based on self-supervised learning (TranSelf-DyGCN) in this paper. Firstly, we design a time-frequency domain feature modeling network to capture global and local spatial and time-domain features, thus improving the stability of machine anomalous sound detection stability under domain shifts. Then, we adopt a Dynamic Graph Convolutional Network (DyGCN) to model the inter-dependence relationship between domain shifts features, enabling the model to perceive domain shifts features efficiently. Finally, we use a Domain Adaptive Network (DAN) to compensate for the performance decrease caused by domain shifts, making the model adapt to anomalous sound better in the self-supervised environment. The performance of the suggested model is validated on DCASE 2020 task 2 and DCASE 2022 task 2.
NeurAR: Neural Uncertainty for Autonomous 3D Reconstruction
Jul 22, 2022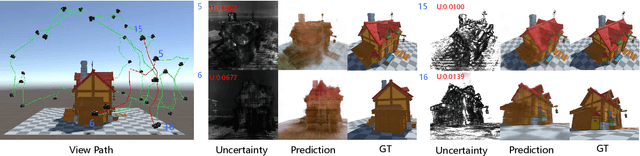
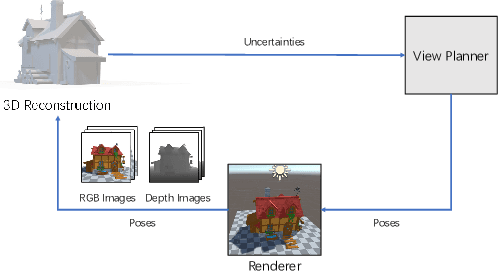
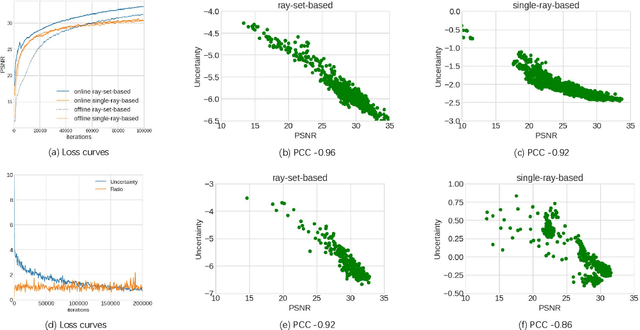
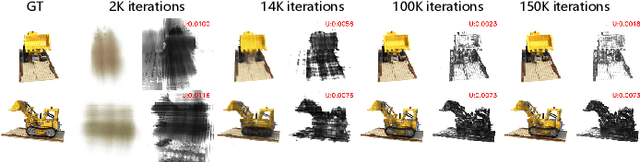
Implicit neural representations have shown compelling results in offline 3D reconstruction and also recently demonstrated the potential for online SLAM systems. However, applying them to autonomous 3D reconstruction, where robots are required to explore a scene and plan a view path for the reconstruction, has not been studied. In this paper, we explore for the first time the possibility of using implicit neural representations for autonomous 3D scene reconstruction by addressing two key challenges: 1) seeking a criterion to measure the quality of the candidate viewpoints for the view planning based on the new representations, and 2) learning the criterion from data that can generalize to different scenes instead of hand-crafting one. For the first challenge, a proxy of Peak Signal-to-Noise Ratio (PSNR) is proposed to quantify a viewpoint quality. The proxy is acquired by treating the color of a spatial point in a scene as a random variable under a Gaussian distribution rather than a deterministic one; the variance of the distribution quantifies the uncertainty of the reconstruction and composes the proxy. For the second challenge, the proxy is optimized jointly with the parameters of an implicit neural network for the scene. With the proposed view quality criterion, we can then apply the new representations to autonomous 3D reconstruction. Our method demonstrates significant improvements on various metrics for the rendered image quality and the geometry quality of the reconstructed 3D models when compared with variants using TSDF or reconstruction without view planning.