 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeurAR: Neural Uncertainty for Autonomous 3D Reconstruction
Jul 22, 2022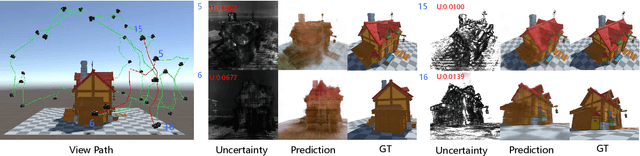
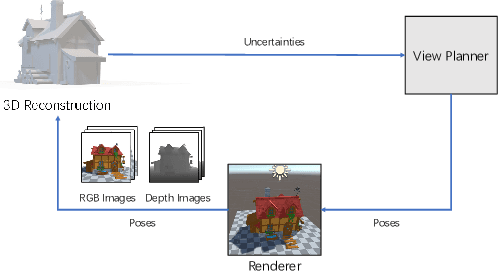
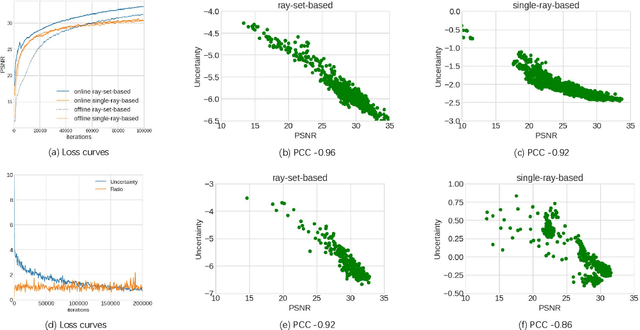
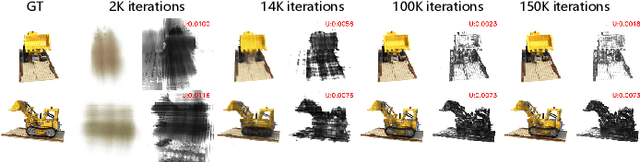
Implicit neural representations have shown compelling results in offline 3D reconstruction and also recently demonstrated the potential for online SLAM systems. However, applying them to autonomous 3D reconstruction, where robots are required to explore a scene and plan a view path for the reconstruction, has not been studied. In this paper, we explore for the first time the possibility of using implicit neural representations for autonomous 3D scene reconstruction by addressing two key challenges: 1) seeking a criterion to measure the quality of the candidate viewpoints for the view planning based on the new representations, and 2) learning the criterion from data that can generalize to different scenes instead of hand-crafting one. For the first challenge, a proxy of Peak Signal-to-Noise Ratio (PSNR) is proposed to quantify a viewpoint quality. The proxy is acquired by treating the color of a spatial point in a scene as a random variable under a Gaussian distribution rather than a deterministic one; the variance of the distribution quantifies the uncertainty of the reconstruction and composes the proxy. For the second challenge, the proxy is optimized jointly with the parameters of an implicit neural network for the scene. With the proposed view quality criterion, we can then apply the new representations to autonomous 3D reconstruction. Our method demonstrates significant improvements on various metrics for the rendered image quality and the geometry quality of the reconstructed 3D models when compared with variants using TSDF or reconstruction without view planning.