 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFried Parameter Estimation from Single Wavefront Sensor Image with Artificial Neural Networks
Apr 23, 2025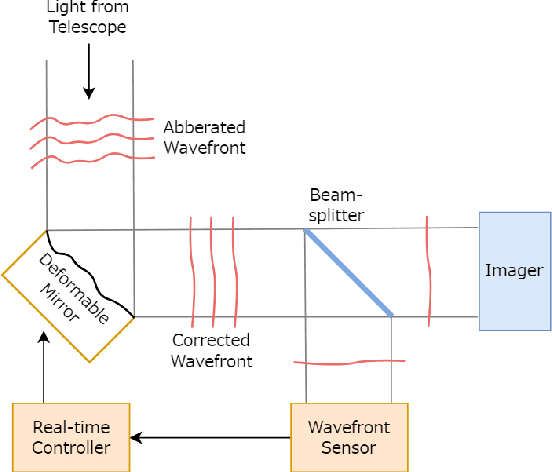



Atmospheric turbulence degrades the quality of astronomical observations in ground-based telescopes, leading to distorted and blurry images. Adaptive Optics (AO) systems are designed to counteract these effects, using atmospheric measurements captured by a wavefront sensor to make real-time corrections to the incoming wavefront. The Fried parameter, r0, characterises the strength of atmospheric turbulence and is an essential control parameter for optimising the performance of AO systems and more recently sky profiling for Free Space Optical (FSO) communication channels. In this paper, we develop a novel data-driven approach, adapting machine learning methods from computer vision for Fried parameter estimation from a single Shack-Hartmann or pyramid wavefront sensor image. Using these data-driven methods, we present a detailed simulation-based evaluation of our approach using the open-source COMPASS AO simulation tool to evaluate both the Shack-Hartmann and pyramid wavefront sensors. Our evaluation is over a range of guide star magnitudes, and realistic noise, atmospheric and instrument conditions. Remarkably, we are able to develop a single network-based estimator that is accurate in both open and closed-loop AO configurations. Our method accurately estimates the Fried parameter from a single WFS image directly from AO telemetry to a few millimetres. Our approach is suitable for real time control, exhibiting 0.83ms r0 inference times on retail NVIDIA RTX 3090 GPU hardware, and thereby demonstrating a compelling economic solution for use in real-time instrument control.
Detecting algorithmic bias in medical AI-models
Dec 06, 2023With the growing prevalence of machine learning and artificial intelligence-based medical decision support systems, it is equally important to ensure that these systems provide patient outcomes in a fair and equitable fashion. This paper presents an innovative framework for detecting areas of algorithmic bias in medical-AI decision support systems. Our approach efficiently identifies potential biases in medical-AI models, specifically in the context of sepsis prediction, by employing the Classification and Regression Trees (CART) algorithm. We verify our methodology by conducting a series of synthetic data experiments, showcasing its ability to estimate areas of bias in controlled settings precisely. The effectiveness of the concept is further validated by experiments using electronic medical records from Grady Memorial Hospital in Atlanta, Georgia. These tests demonstrate the practical implementation of our strategy in a clinical environment, where it can function as a vital instrument for guaranteeing fairness and equity in AI-based medical decisions.
HANDAL: A Dataset of Real-World Manipulable Object Categories with Pose Annotations, Affordances, and Reconstructions
Aug 02, 2023We present the HANDAL dataset for category-level object pose estimation and affordance prediction. Unlike previous datasets, ours is focused on robotics-ready manipulable objects that are of the proper size and shape for functional grasping by robot manipulators, such as pliers, utensils, and screwdrivers. Our annotation process is streamlined, requiring only a single off-the-shelf camera and semi-automated processing, allowing us to produce high-quality 3D annotations without crowd-sourcing. The dataset consists of 308k annotated image frames from 2.2k videos of 212 real-world objects in 17 categories. We focus on hardware and kitchen tool objects to facilitate research in practical scenarios in which a robot manipulator needs to interact with the environment beyond simple pushing or indiscriminate grasping. We outline the usefulness of our dataset for 6-DoF category-level pose+scale estimation and related tasks. We also provide 3D reconstructed meshes of all objects, and we outline some of the bottlenecks to be addressed for democratizing the collection of datasets like this one.
6-DoF Pose Estimation of Household Objects for Robotic Manipulation: An Accessible Dataset and Benchmark
Mar 11, 2022
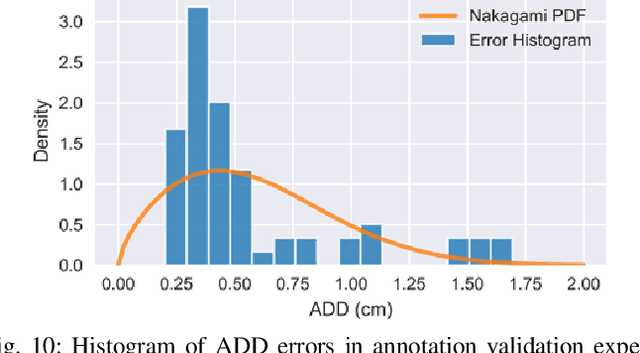
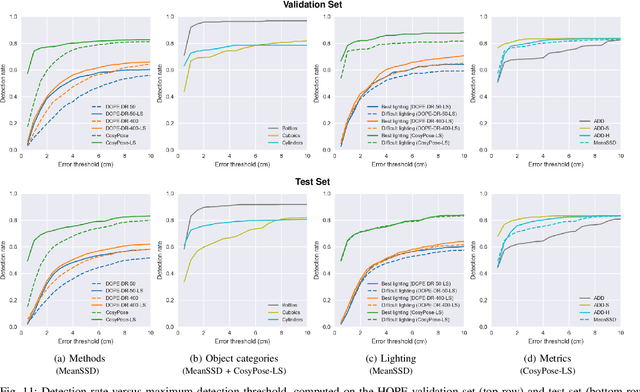
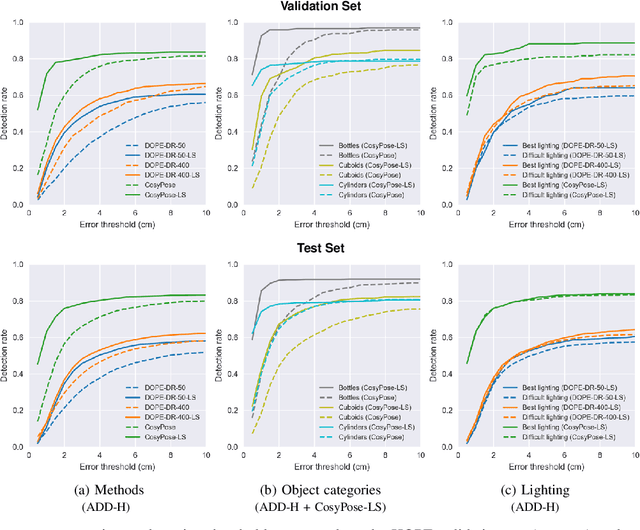
We present a new dataset for 6-DoF pose estimation of known objects, with a focus on robotic manipulation research. We propose a set of toy grocery objects, whose physical instantiations are readily available for purchase and are appropriately sized for robotic grasping and manipulation. We provide 3D scanned textured models of these objects, suitable for generating synthetic training data, as well as RGBD images of the objects in challenging, cluttered scenes exhibiting partial occlusion, extreme lighting variations, multiple instances per image, and a large variety of poses. Using semi-automated RGBD-to-model texture correspondences, the images are annotated with ground truth poses that were verified empirically to be accurate to within a few millimeters. We also propose a new pose evaluation metric called {ADD-H} based upon the Hungarian assignment algorithm that is robust to symmetries in object geometry without requiring their explicit enumeration. We share pre-trained pose estimators for all the toy grocery objects, along with their baseline performance on both validation and test sets. We offer this dataset to the community to help connect the efforts of computer vision researchers with the needs of roboticists.
ExoMiner: A Highly Accurate and Explainable Deep Learning Classifier that Validates 301 New Exoplanets
Dec 08, 2021
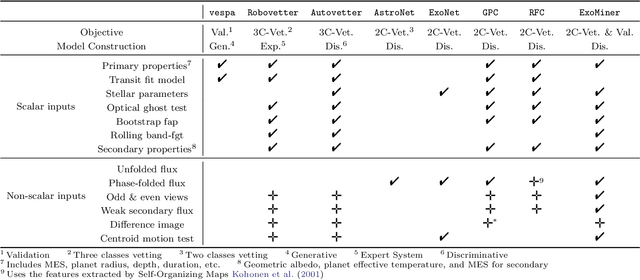
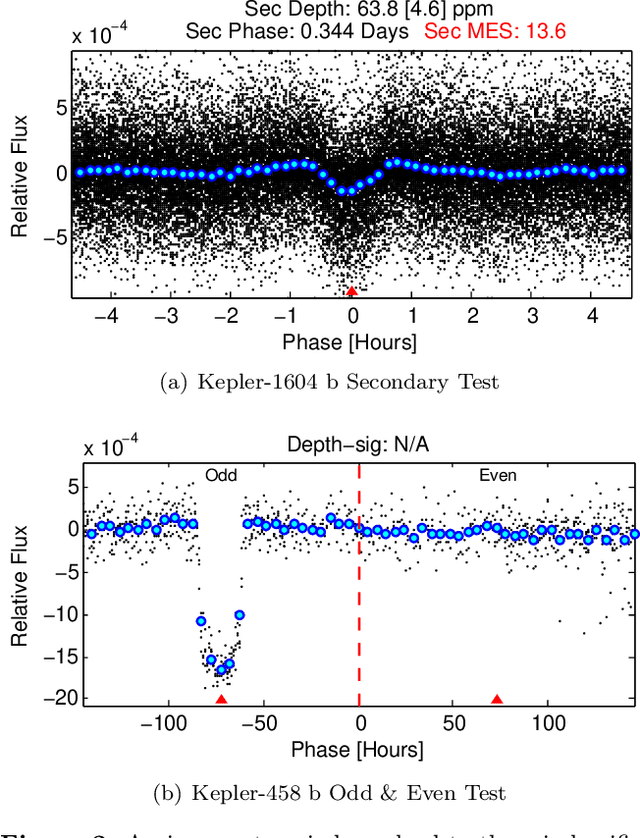
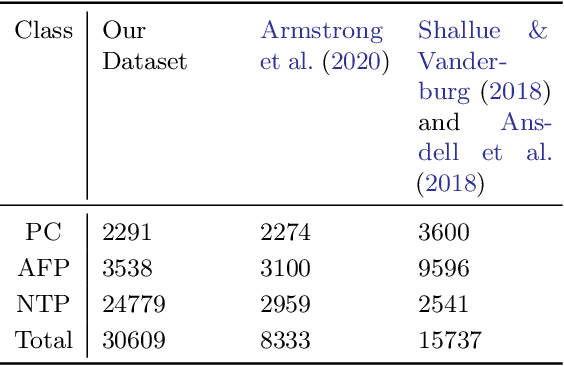
The kepler and TESS missions have generated over 100,000 potential transit signals that must be processed in order to create a catalog of planet candidates. During the last few years, there has been a growing interest in using machine learning to analyze these data in search of new exoplanets. Different from the existing machine learning works, ExoMiner, the proposed deep learning classifier in this work, mimics how domain experts examine diagnostic tests to vet a transit signal. ExoMiner is a highly accurate, explainable, and robust classifier that 1) allows us to validate 301 new exoplanets from the MAST Kepler Archive and 2) is general enough to be applied across missions such as the on-going TESS mission. We perform an extensive experimental study to verify that ExoMiner is more reliable and accurate than the existing transit signal classifiers in terms of different classification and ranking metrics. For example, for a fixed precision value of 99%, ExoMiner retrieves 93.6% of all exoplanets in the test set (i.e., recall=0.936) while this rate is 76.3% for the best existing classifier. Furthermore, the modular design of ExoMiner favors its explainability. We introduce a simple explainability framework that provides experts with feedback on why ExoMiner classifies a transit signal into a specific class label (e.g., planet candidate or not planet candidate).
Toward Low-Flying Autonomous MAV Trail Navigation using Deep Neural Networks for Environmental Awareness
Jul 22, 2017
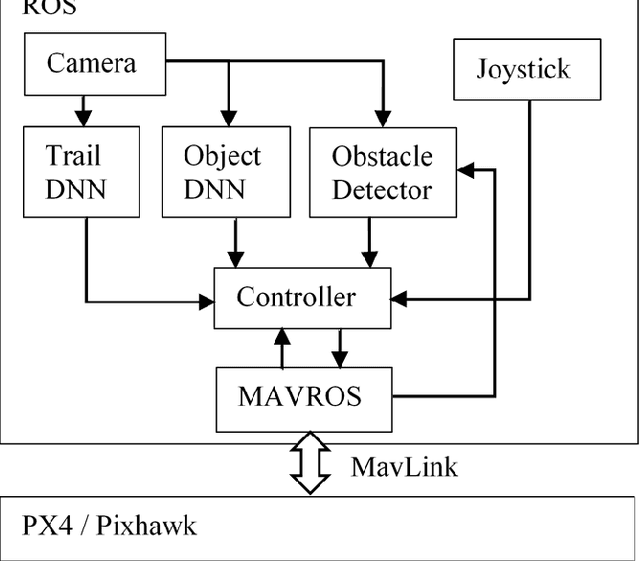


We present a micro aerial vehicle (MAV) system, built with inexpensive off-the-shelf hardware, for autonomously following trails in unstructured, outdoor environments such as forests. The system introduces a deep neural network (DNN) called TrailNet for estimating the view orientation and lateral offset of the MAV with respect to the trail center. The DNN-based controller achieves stable flight without oscillations by avoiding overconfident behavior through a loss function that includes both label smoothing and entropy reward. In addition to the TrailNet DNN, the system also utilizes vision modules for environmental awareness, including another DNN for object detection and a visual odometry component for estimating depth for the purpose of low-level obstacle detection. All vision systems run in real time on board the MAV via a Jetson TX1. We provide details on the hardware and software used, as well as implementation details. We present experiments showing the ability of our system to navigate forest trails more robustly than previous techniques, including autonomous flights of 1 km.