 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge6-DoF Pose Estimation of Household Objects for Robotic Manipulation: An Accessible Dataset and Benchmark
Paper and Code

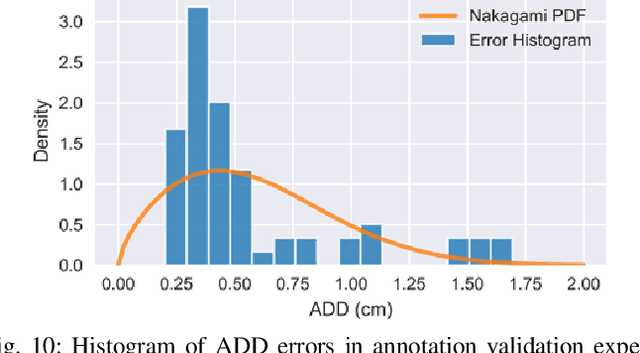
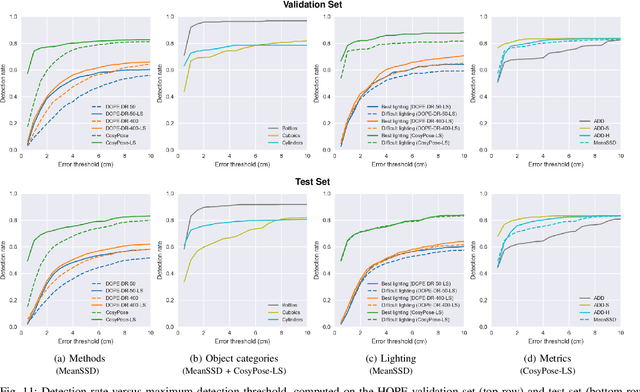
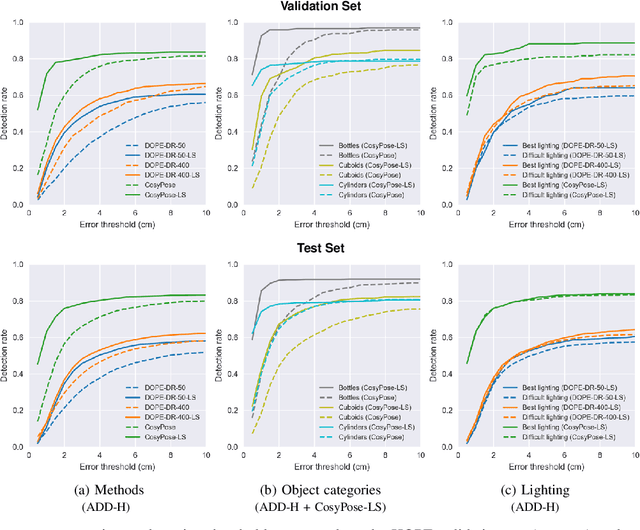
We present a new dataset for 6-DoF pose estimation of known objects, with a focus on robotic manipulation research. We propose a set of toy grocery objects, whose physical instantiations are readily available for purchase and are appropriately sized for robotic grasping and manipulation. We provide 3D scanned textured models of these objects, suitable for generating synthetic training data, as well as RGBD images of the objects in challenging, cluttered scenes exhibiting partial occlusion, extreme lighting variations, multiple instances per image, and a large variety of poses. Using semi-automated RGBD-to-model texture correspondences, the images are annotated with ground truth poses that were verified empirically to be accurate to within a few millimeters. We also propose a new pose evaluation metric called {ADD-H} based upon the Hungarian assignment algorithm that is robust to symmetries in object geometry without requiring their explicit enumeration. We share pre-trained pose estimators for all the toy grocery objects, along with their baseline performance on both validation and test sets. We offer this dataset to the community to help connect the efforts of computer vision researchers with the needs of roboticists.