 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCleanUMamba: A Compact Mamba Network for Speech Denoising using Channel Pruning
Oct 14, 2024



This paper presents CleanUMamba, a time-domain neural network architecture designed for real-time causal audio denoising directly applied to raw waveforms. CleanUMamba leverages a U-Net encoder-decoder structure, incorporating the Mamba state-space model in the bottleneck layer. By replacing conventional self-attention and LSTM mechanisms with Mamba, our architecture offers superior denoising performance while maintaining a constant memory footprint, enabling streaming operation. To enhance efficiency, we applied structured channel pruning, achieving an 8X reduction in model size without compromising audio quality. Our model demonstrates strong results in the Interspeech 2020 Deep Noise Suppression challenge. Specifically, CleanUMamba achieves a PESQ score of 2.42 and STOI of 95.1% with only 442K parameters and 468M MACs, matching or outperforming larger models in real-time performance. Code will be available at: https://github.com/lab-emi/CleanUMamba
HAVANA: Hierarchical stochastic neighbor embedding for Accelerated Video ANnotAtions
Sep 16, 2024Video annotation is a critical and time-consuming task in computer vision research and applications. This paper presents a novel annotation pipeline that uses pre-extracted features and dimensionality reduction to accelerate the temporal video annotation process. Our approach uses Hierarchical Stochastic Neighbor Embedding (HSNE) to create a multi-scale representation of video features, allowing annotators to efficiently explore and label large video datasets. We demonstrate significant improvements in annotation effort compared to traditional linear methods, achieving more than a 10x reduction in clicks required for annotating over 12 hours of video. Our experiments on multiple datasets show the effectiveness and robustness of our pipeline across various scenarios. Moreover, we investigate the optimal configuration of HSNE parameters for different datasets. Our work provides a promising direction for scaling up video annotation efforts in the era of video understanding.
Deep Continuous Networks
Feb 02, 2024CNNs and computational models of biological vision share some fundamental principles, which opened new avenues of research. However, fruitful cross-field research is hampered by conventional CNN architectures being based on spatially and depthwise discrete representations, which cannot accommodate certain aspects of biological complexity such as continuously varying receptive field sizes and dynamics of neuronal responses. Here we propose deep continuous networks (DCNs), which combine spatially continuous filters, with the continuous depth framework of neural ODEs. This allows us to learn the spatial support of the filters during training, as well as model the continuous evolution of feature maps, linking DCNs closely to biological models. We show that DCNs are versatile and highly applicable to standard image classification and reconstruction problems, where they improve parameter and data efficiency, and allow for meta-parametrization. We illustrate the biological plausibility of the scale distributions learned by DCNs and explore their performance in a neuroscientifically inspired pattern completion task. Finally, we investigate an efficient implementation of DCNs by changing input contrast.
* Presented at ICML 2021
A step towards understanding why classification helps regression
Aug 21, 2023A number of computer vision deep regression approaches report improved results when adding a classification loss to the regression loss. Here, we explore why this is useful in practice and when it is beneficial. To do so, we start from precisely controlled dataset variations and data samplings and find that the effect of adding a classification loss is the most pronounced for regression with imbalanced data. We explain these empirical findings by formalizing the relation between the balanced and imbalanced regression losses. Finally, we show that our findings hold on two real imbalanced image datasets for depth estimation (NYUD2-DIR), and age estimation (IMDB-WIKI-DIR), and on the problem of imbalanced video progress prediction (Breakfast). Our main takeaway is: for a regression task, if the data sampling is imbalanced, then add a classification loss.
Is there progress in activity progress prediction?
Aug 10, 2023Activity progress prediction aims to estimate what percentage of an activity has been completed. Currently this is done with machine learning approaches, trained and evaluated on complicated and realistic video datasets. The videos in these datasets vary drastically in length and appearance. And some of the activities have unanticipated developments, making activity progression difficult to estimate. In this work, we examine the results obtained by existing progress prediction methods on these datasets. We find that current progress prediction methods seem not to extract useful visual information for the progress prediction task. Therefore, these methods fail to exceed simple frame-counting baselines. We design a precisely controlled dataset for activity progress prediction and on this synthetic dataset we show that the considered methods can make use of the visual information, when this directly relates to the progress prediction. We conclude that the progress prediction task is ill-posed on the currently used real-world datasets. Moreover, to fairly measure activity progression we advise to consider a, simple but effective, frame-counting baseline.
Objects do not disappear: Video object detection by single-frame object location anticipation
Aug 09, 2023Objects in videos are typically characterized by continuous smooth motion. We exploit continuous smooth motion in three ways. 1) Improved accuracy by using object motion as an additional source of supervision, which we obtain by anticipating object locations from a static keyframe. 2) Improved efficiency by only doing the expensive feature computations on a small subset of all frames. Because neighboring video frames are often redundant, we only compute features for a single static keyframe and predict object locations in subsequent frames. 3) Reduced annotation cost, where we only annotate the keyframe and use smooth pseudo-motion between keyframes. We demonstrate computational efficiency, annotation efficiency, and improved mean average precision compared to the state-of-the-art on four datasets: ImageNet VID, EPIC KITCHENS-55, YouTube-BoundingBoxes, and Waymo Open dataset. Our source code is available at https://github.com/L-KID/Videoobject-detection-by-location-anticipation.
Differentiable Transportation Pruning
Jul 31, 2023Deep learning algorithms are increasingly employed at the edge. However, edge devices are resource constrained and thus require efficient deployment of deep neural networks. Pruning methods are a key tool for edge deployment as they can improve storage, compute, memory bandwidth, and energy usage. In this paper we propose a novel accurate pruning technique that allows precise control over the output network size. Our method uses an efficient optimal transportation scheme which we make end-to-end differentiable and which automatically tunes the exploration-exploitation behavior of the algorithm to find accurate sparse sub-networks. We show that our method achieves state-of-the-art performance compared to previous pruning methods on 3 different datasets, using 5 different models, across a wide range of pruning ratios, and with two types of sparsity budgets and pruning granularities.
Evaluating Context for Deep Object Detectors
May 05, 2022



Which object detector is suitable for your context sensitive task? Deep object detectors exploit scene context for recognition differently. In this paper, we group object detectors into 3 categories in terms of context use: no context by cropping the input (RCNN), partial context by cropping the featuremap (two-stage methods) and full context without any cropping (single-stage methods). We systematically evaluate the effect of context for each deep detector category. We create a fully controlled dataset for varying context and investigate the context for deep detectors. We also evaluate gradually removing the background context and the foreground object on MS COCO. We demonstrate that single-stage and two-stage object detectors can and will use the context by virtue of their large receptive field. Thus, choosing the best object detector may depend on the application context.
Deep vanishing point detection: Geometric priors make dataset variations vanish
Mar 16, 2022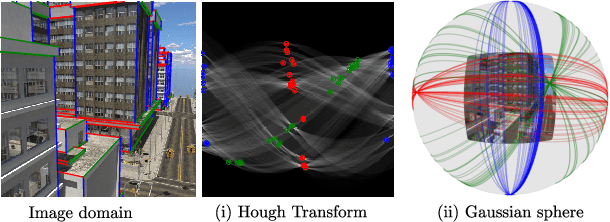
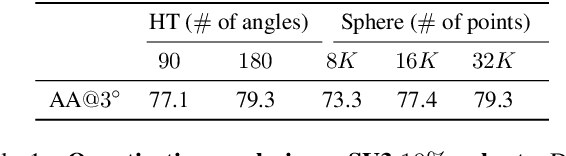
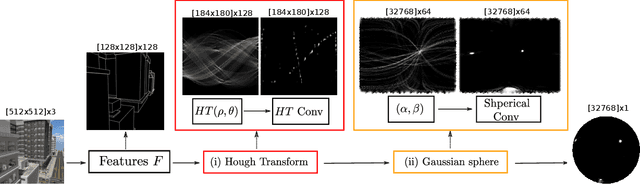
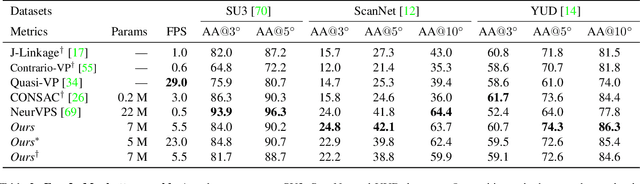
Deep learning has improved vanishing point detection in images. Yet, deep networks require expensive annotated datasets trained on costly hardware and do not generalize to even slightly different domains, and minor problem variants. Here, we address these issues by injecting deep vanishing point detection networks with prior knowledge. This prior knowledge no longer needs to be learned from data, saving valuable annotation efforts and compute, unlocking realistic few-sample scenarios, and reducing the impact of domain changes. Moreover, the interpretability of the priors allows to adapt deep networks to minor problem variations such as switching between Manhattan and non-Manhattan worlds. We seamlessly incorporate two geometric priors: (i) Hough Transform -- mapping image pixels to straight lines, and (ii) Gaussian sphere -- mapping lines to great circles whose intersections denote vanishing points. Experimentally, we ablate our choices and show comparable accuracy to existing models in the large-data setting. We validate our model's improved data efficiency, robustness to domain changes, adaptability to non-Manhattan settings.
Equal Bits: Enforcing Equally Distributed Binary Network Weights
Dec 02, 2021
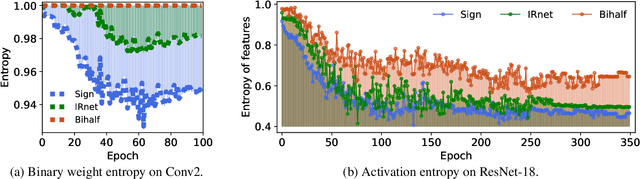

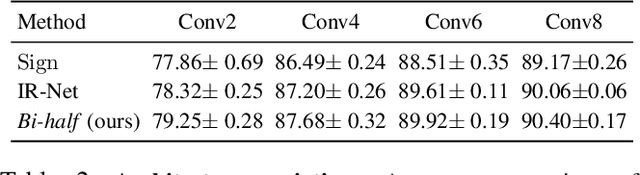
Binary networks are extremely efficient as they use only two symbols to define the network: $\{+1,-1\}$. One can make the prior distribution of these symbols a design choice. The recent IR-Net of Qin et al. argues that imposing a Bernoulli distribution with equal priors (equal bit ratios) over the binary weights leads to maximum entropy and thus minimizes information loss. However, prior work cannot precisely control the binary weight distribution during training, and therefore cannot guarantee maximum entropy. Here, we show that quantizing using optimal transport can guarantee any bit ratio, including equal ratios. We investigate experimentally that equal bit ratios are indeed preferable and show that our method leads to optimization benefits. We show that our quantization method is effective when compared to state-of-the-art binarization methods, even when using binary weight pruning.