 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEMMA: End-to-End Multimodal Model for Autonomous Driving
Oct 30, 2024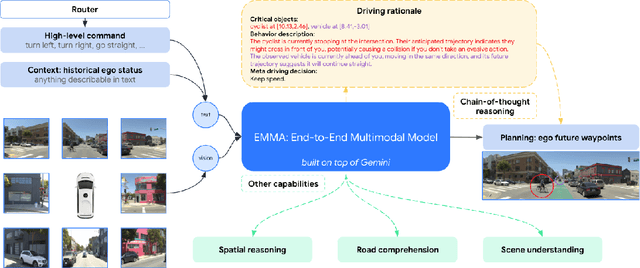
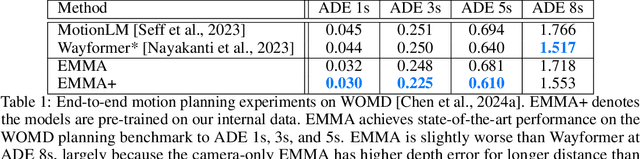
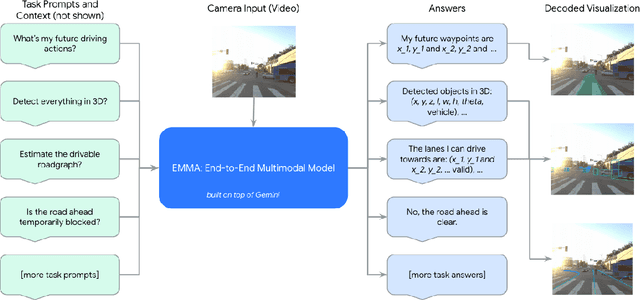
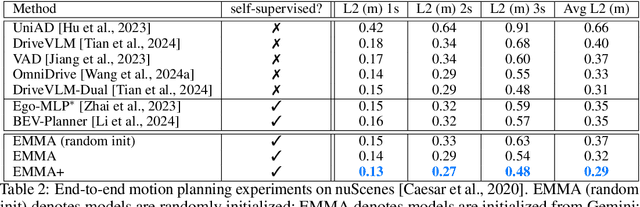
We introduce EMMA, an End-to-end Multimodal Model for Autonomous driving. Built on a multi-modal large language model foundation, EMMA directly maps raw camera sensor data into various driving-specific outputs, including planner trajectories, perception objects, and road graph elements. EMMA maximizes the utility of world knowledge from the pre-trained large language models, by representing all non-sensor inputs (e.g. navigation instructions and ego vehicle status) and outputs (e.g. trajectories and 3D locations) as natural language text. This approach allows EMMA to jointly process various driving tasks in a unified language space, and generate the outputs for each task using task-specific prompts. Empirically, we demonstrate EMMA's effectiveness by achieving state-of-the-art performance in motion planning on nuScenes as well as competitive results on the Waymo Open Motion Dataset (WOMD). EMMA also yields competitive results for camera-primary 3D object detection on the Waymo Open Dataset (WOD). We show that co-training EMMA with planner trajectories, object detection, and road graph tasks yields improvements across all three domains, highlighting EMMA's potential as a generalist model for autonomous driving applications. However, EMMA also exhibits certain limitations: it can process only a small amount of image frames, does not incorporate accurate 3D sensing modalities like LiDAR or radar and is computationally expensive. We hope that our results will inspire further research to mitigate these issues and to further evolve the state of the art in autonomous driving model architectures.
Scalability in Perception for Autonomous Driving: Waymo Open Dataset
Dec 18, 2019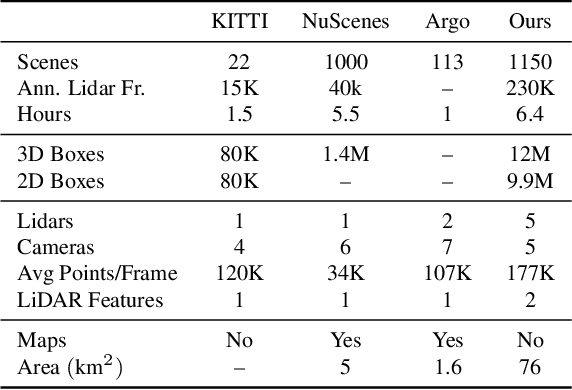



The research community has increasing interest in autonomous driving research, despite the resource intensity of obtaining representative real world data. Existing self-driving datasets are limited in the scale and variation of the environments they capture, even though generalization within and between operating regions is crucial to the overall viability of the technology. In an effort to help align the research community's contributions with real-world self-driving problems, we introduce a new large scale, high quality, diverse dataset. Our new dataset consists of 1150 scenes that each span 20 seconds, consisting of well synchronized and calibrated high quality LiDAR and camera data captured across a range of urban and suburban geographies. It is 15x more diverse than the largest camera+LiDAR dataset available based on our proposed diversity metric. We exhaustively annotated this data with 2D (camera image) and 3D (LiDAR) bounding boxes, with consistent identifiers across frames. Finally, we provide strong baselines for 2D as well as 3D detection and tracking tasks. We further study the effects of dataset size and generalization across geographies on 3D detection methods. Find data, code and more up-to-date information at http://www.waymo.com/open.
End-to-End Multi-View Fusion for 3D Object Detection in LiDAR Point Clouds
Oct 23, 2019



Recent work on 3D object detection advocates point cloud voxelization in birds-eye view, where objects preserve their physical dimensions and are naturally separable. When represented in this view, however, point clouds are sparse and have highly variable point density, which may cause detectors difficulties in detecting distant or small objects (pedestrians, traffic signs, etc.). On the other hand, perspective view provides dense observations, which could allow more favorable feature encoding for such cases. In this paper, we aim to synergize the birds-eye view and the perspective view and propose a novel end-to-end multi-view fusion (MVF) algorithm, which can effectively learn to utilize the complementary information from both. Specifically, we introduce dynamic voxelization, which has four merits compared to existing voxelization methods, i) removing the need of pre-allocating a tensor with fixed size; ii) overcoming the information loss due to stochastic point/voxel dropout; iii) yielding deterministic voxel embeddings and more stable detection outcomes; iv) establishing the bi-directional relationship between points and voxels, which potentially lays a natural foundation for cross-view feature fusion. By employing dynamic voxelization, the proposed feature fusion architecture enables each point to learn to fuse context information from different views. MVF operates on points and can be naturally extended to other approaches using LiDAR point clouds. We evaluate our MVF model extensively on the newly released Waymo Open Dataset and on the KITTI dataset and demonstrate that it significantly improves detection accuracy over the comparable single-view PointPillars baseline.